关节加速度驱动的冗余度机械臂均匀磨损运动控制方法与流程
本发明涉及机械臂运动规划,也可用于金融领域,尤其涉及关节加速度驱动的冗余度机械臂均匀磨损运动控制方法。
背景技术:
1、冗余度机械臂具有自由度大于任务空间所需最少自由度的特性,这一特性使得冗余机械臂能够在完成任务的同时兼顾其他的需求,比如:能量消耗、关节约束、姿态控制等,极大地提高了机械臂的灵活度。因此,相比于非冗余度机械臂,冗余度机械臂在完成复杂、困难任务中有着更大的优势。在生产过程中,在执行各种工作任务时,机械臂需要保持均匀的运动,这样可以提高工作效率并减少出错率。此外,均匀运动还有利于保护机械臂和工作环境的安全。机械臂在执行任务时,速度和位置的控制至关重要。如果机械臂运动不均匀,则会降低执行任务的效率,影响工作效果和质量。机械臂部件在运动时会受到不断的撞击和摩擦,如果机械臂运动不均匀,则部件之间的磨损会更大,从而影响机械臂的寿命。
2、以往的运动规划方案大多通过关节速度驱动机械臂运动,极少考虑机械臂磨损问题,并不能完全满足实际运用的需求。基于速度层的方案在求解过程中可能会出现关节速度不连续的问题,导致机械臂运动不均匀,影响工作效率。
3、本部分旨在为权利要求书中陈述的本发明实施例提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现思路
1、本发明实施例提供一种关节加速度驱动的冗余度机械臂均匀磨损运动控制方法及装置,能够至少部分地解决现有技术中存在的问题。
2、一方面,本发明实施例提供一种关节加速度驱动的冗余度机械臂均匀磨损运动控制方法,该方法包括:
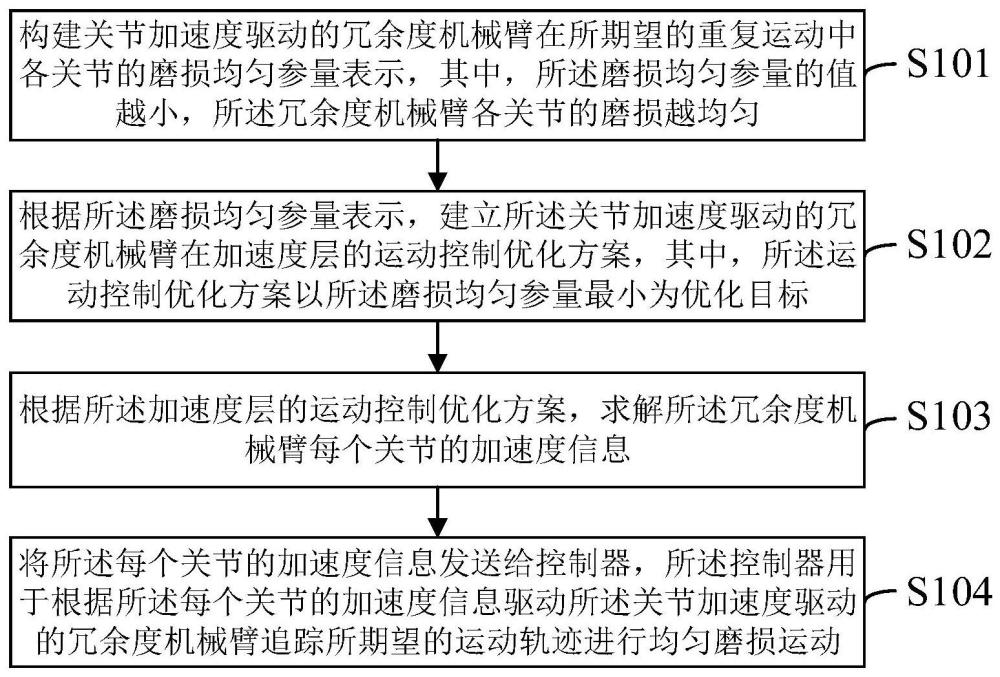
3、构建关节加速度驱动的冗余度机械臂在所期望的重复运动中各关节的磨损均匀参量表示,其中,所述磨损均匀参量的值越小,所述冗余度机械臂各关节的磨损越均匀;
4、根据所述磨损均匀参量表示,建立所述关节加速度驱动的冗余度机械臂在加速度层的运动控制优化方案,其中,所述运动控制优化方案以所述磨损均匀参量最小为优化目标;
5、根据所述加速度层的运动控制优化方案,求解所述冗余度机械臂每个关节的加速度信息;
6、将所述每个关节的加速度信息发送给控制器,所述控制器用于根据所述每个关节的加速度信息驱动所述关节加速度驱动的冗余度机械臂追踪所期望的运动轨迹进行均匀磨损运动。
7、在一些实施例中,所述构建关节加速度驱动的冗余度机械臂在所期望的重复运动中各关节的磨损均匀参量表示包括:
8、根据关节加速度驱动的冗余度机械臂在所期望的重复运动中每个关节的关节角度参量以及该关节的角度标准值参量,构建所述关节加速度驱动的冗余度机械臂在所期望的重复运动中各关节的磨损均匀参量表示。
9、在一些实施例中,所述各关节的磨损均匀参量表示为各关节的关节角度参量组成的第一向量与各关节的关节角度标准值参量组成的第二向量之间的差值在所述冗余度机械臂在所期望的重复运动中的积分。
10、在一些实施例中,所述根据所述加速度层的运动控制优化方案,求解所述冗余度机械臂每个关节的加速度信息包括:
11、根据所述加速度层的运动控制优化方案以及所述冗余度机械臂在所期望的重复运动中的约束条件,求解所述关节加速度驱动的冗余度机械臂每个关节的加速度信息。
12、在一些实施例中,所述方法还包括:
13、根据所述冗余度机械臂的雅可比矩阵、所述冗余度机械臂的末端执行器执行重复任务时的实际位置参量以及所述冗余度机械臂的末端执行器在所期望的重复运动过程中的位置参量、速度参量和加速度参量,建立所述冗余度机械臂的关节加速度雅可比等式约束;和/或
14、根据所述冗余度机械臂在所期望的重复运动中的关节加速度取值集合,建立所述冗余度机械臂的关节加速度大小约束。
15、在一些实施例中,所述根据所述加速度层的运动控制优化方案,求解所述冗余度机械臂每个关节的加速度信息包括:
16、将所述加速度层的运动控制优化方案转化分段投影方程组;
17、在所述分段投影方程组中引入至少一组用于克服噪声干扰的动态参数,生成一具有抗噪功能的数值迭代模型;
18、对所述具有抗噪功能的数值迭代模型进行求解,得到所述冗余度机械臂每个关节的加速度信息。
19、另一方面,本发明实施例提供一种关节加速度驱动的冗余度机械臂均匀磨损运动控制装置,该装置包括:
20、构建模块,用于构建关节加速度驱动的冗余度机械臂在所期望的重复运动中各关节的磨损均匀参量表示,其中,所述磨损均匀参量的值越小,所述冗余度机械臂各关节的磨损越均匀;
21、第一建立模块,用于根据所述磨损均匀参量表示,建立所述关节加速度驱动的冗余度机械臂在加速度层的运动控制优化方案,其中,所述运动控制优化方案以所述磨损均匀参量最小为优化目标;
22、求解模块,用于根据所述加速度层的运动控制优化方案,求解所述冗余度机械臂每个关节的加速度信息;
23、发送模块,用于将所述每个关节的加速度信息发送给控制器,所述控制器用于根据所述每个关节的加速度信息驱动所述关节加速度驱动的冗余度机械臂追踪所期望的运动轨迹进行均匀磨损运动。
24、在一些实施例中,所述构建模块具体用于:
25、根据关节加速度驱动的冗余度机械臂在所期望的重复运动中每个关节的关节角度参量以及该关节的角度标准值参量,构建所述关节加速度驱动的冗余度机械臂在所期望的重复运动中各关节的磨损均匀参量表示。
26、在一些实施例中,所述各关节的磨损均匀参量表示为各关节的关节角度参量组成的第一向量与各关节的关节角度标准值参量组成的第二向量之间的差值在所述冗余度机械臂在所期望的重复运动中的积分。
27、在一些实施例中,所述求解模块具体用于:
28、根据所述加速度层的运动控制优化方案以及所述冗余度机械臂在所期望的重复运动中的约束条件,求解所述关节加速度驱动的冗余度机械臂每个关节的加速度信息。
29、在一些实施例中,所述装置还包括第二建立模块,所述第二建立模块用于:
30、根据所述冗余度机械臂的雅可比矩阵、所述冗余度机械臂的末端执行器执行重复任务时的实际位置参量以及所述冗余度机械臂的末端执行器在所期望的重复运动过程中的位置参量、速度参量和加速度参量,建立所述冗余度机械臂的关节加速度雅可比等式约束;和/或
31、根据所述冗余度机械臂在所期望的重复运动中的关节加速度取值集合,建立所述冗余度机械臂的关节加速度大小约束。
32、在一些实施例中,所述求解模块具体用于:
33、将所述加速度层的运动控制优化方案转化分段投影方程组;
34、在所述分段投影方程组中引入至少一组用于克服噪声干扰的动态参数,生成一具有抗噪功能的数值迭代模型;
35、对所述具有抗噪功能的数值迭代模型进行求解,得到所述冗余度机械臂每个关节的加速度信息。
36、本发明实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述关节加速度驱动的冗余度机械臂均匀磨损运动控制方法。
37、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述关节加速度驱动的冗余度机械臂均匀磨损运动控制方法。
38、本发明实施例还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述关节加速度驱动的冗余度机械臂均匀磨损运动控制方法。
39、本发明实施例提供的关节加速度驱动的冗余度机械臂均匀磨损运动控制方法及装置,通过建立关节加速度驱动的冗余度机械臂在所期望的运动轨迹运动时各关节的磨损均匀参量表示,并将该磨损均匀参量表示拓展到关节加速度层,得到所述关节加速度驱动的冗余度机械臂在加速度层的运动控制优化方案,接着对所述运动控制优化方案进行求解,得到所述冗余度机械臂每个关节的加速度信息,根据所述每个关节的加速度信息控制所述关节加速度驱动的冗余度机械臂追踪所期望的运动轨迹,这样,能够使所述关节加速度驱动的冗余度机械臂最大程度的实现均匀磨损,解决由于关节速度不连续导致机械臂运动不均匀,影响工作效率的问题。
- 还没有人留言评论。精彩留言会获得点赞!