电缆抓取点的定位方法、装置和机器人系统与流程
本技术涉及机器人视觉领域,特别是涉及电缆抓取点的定位方法。
背景技术:
1、对配电网络进行作业的过程中,需要精确识别出电缆抓取点的位置,控制带电作业机器人完成抓线、剥线、挂线等动作。
2、现有技术中,一般采用以激光雷达为传感器的全局激光建模定位方法,或者以相机为传感器的视觉定位方法,识别出电缆的位置,然后针对电缆完成作业。然而,当使用全局激光建模方案定位电缆时,由于其传感器本身的精度多在3cm至5cm,结合系统误差,最终定位精度往往不足1cm;而使用视觉方案定位电缆时,抗干扰能力较差,在户外环境中强光、夜间等条件下,定位精度较低。综上,全局激光建模定位方案或视觉定位方案对电缆抓取点的定位精度都较为低下,无法满足作业需求。
3、针对相关技术中存在电缆抓取点的定位精度低下的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种电缆抓取点的定位方法、装置和机器人系统,以解决相关技术中电缆抓取点的定位精度低下的问题。
2、第一个方面,在本实施例中提供了一种电缆抓取点的定位方法,包括:
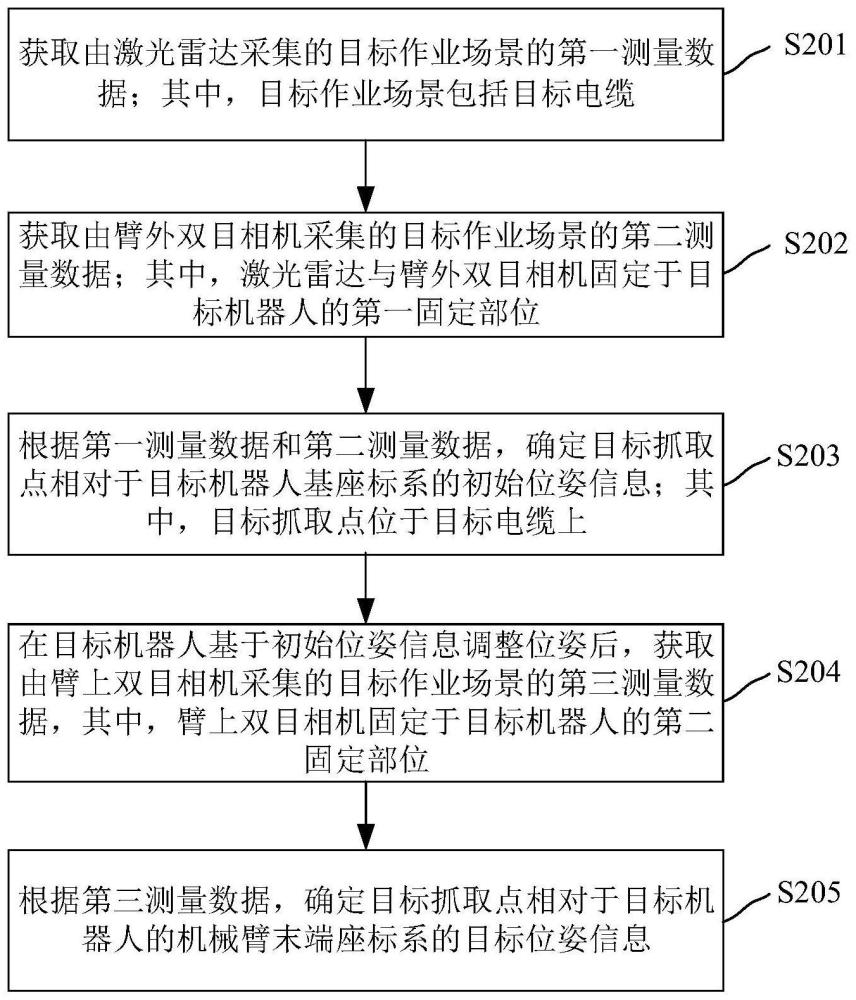
3、获取由激光雷达采集的目标作业场景的第一测量数据;其中,所述目标作业场景包括目标电缆;
4、获取由臂外双目相机采集的所述目标作业场景的第二测量数据;其中,所述激光雷达与所述臂外双目相机固定于目标机器人的第一固定部位;
5、根据所述第一测量数据和所述第二测量数据,确定目标抓取点相对于所述目标机器人基座标系的初始位姿信息;其中,所述目标抓取点位于所述目标电缆上;
6、在所述目标机器人基于所述初始位姿信息调整位姿后,获取由臂上双目相机采集的所述目标作业场景的第三测量数据,其中,所述臂上双目相机固定于所述目标机器人的第二固定部位;
7、根据所述第三测量数据,确定所述目标抓取点相对于所述目标机器人的机械臂末端座标系的目标位姿信息。
8、在其中的一些实施例中,所述根据所述第一测量数据和所述第二测量数据,确定目标抓取点相对于所述目标机器人基座标系的初始位姿信息,包括:
9、确定所述激光雷达与所述臂外双目相机的位置关系,作为第一位置关系;
10、确定所述激光雷达与所述第一固定部位的位置关系,作为第二位置关系;
11、确定所述第一固定部位与所述目标机器人的基座之间的位置关系,作为第三位置关系;
12、根据所述第一位置关系、所述第二位置关系以及所述第三位置关系,结合所述第一测量数据和所述第二测量数据,确定所述初始位姿信息。
13、在其中的一些实施例中,所述确定所述激光雷达与所述臂外双目相机的位置关系,作为第一位置关系,包括:
14、利用预设标定板对所述激光雷达与所述臂外双目相机的位置关系进行标定,得到所述第一位置关系。
15、在其中的一些实施例中,所述确定所述激光雷达与所述第一固定部位的位置关系,作为第二位置关系,包括:
16、利用预设标定物对所述激光雷达与所述第一固定部位的位置关系进行标定,得到所述第二位置关系。
17、在其中的一些实施例中,所述根据所述第一位置关系、所述第二关系以及所述第三位置关系,结合所述第一测量数据和所述第二测量数据,确定所述初始位姿信息,包括:
18、根据所述第一位置关系,对所述第一测量数据和所述第二测量数据进行融合,得到目标融合信息;
19、根据所述第二位置关系,将所述目标融合信息转化到所述目标机器人基座标系中,得到所述初始位姿信息。
20、在其中的一些实施例中,所述根据所述第三测量数据,确定所述目标抓取点相对于所述目标机器人的机械臂末端座标系的目标位姿信息,包括:
21、确定所述臂上双目相机与所述目标机器人的机械臂末端的位置关系;
22、根据所述位置关系,结合所述第三测量数据,确定所述目标抓取点相对于所述目标机器人的机械臂末端座标系的目标位姿信息。
23、在其中的一些实施例中,所述方法还包括:
24、根据所述初始位姿信息,控制所述目标机器人的移动和姿态调整运动;
25、根据所述目标位姿信息,控制所述目标机器人的末端运动。
26、第二个方面,在本实施例中提供了一种电缆抓取点的定位装置,包括:第一获取模块、第二获取模块、第一定位模块、第三获取模块以及第二定位模块,其中:
27、所述第一获取模块,用于获取由激光雷达采集的目标作业场景的第一测量数据;其中,所述目标作业场景包括目标电缆;
28、所述第二获取模块,用于获取由臂外双目相机采集的所述目标作业场景的第二测量数据;其中,所述激光雷达与所述臂外双目相机固定于目标机器人的第一固定部位;
29、所述第一定位模块,用于根据所述第一测量数据和所述第二测量数据,确定目标抓取点相对于所述目标机器人基座标系的初始位姿信息;其中,所述目标抓取点位于所述目标电缆上;
30、所述第三获取模块,用于在所述目标机器人基于所述初始位姿信息调整位姿后,获取由臂上双目相机采集的所述目标作业场景的第三测量数据,其中,所述臂上双目相机固定于所述目标机器人的第二固定部位;
31、所述第二定位模块,用于根据所述第三测量数据,确定所述目标抓取点相对于所述目标机器人的机械臂末端座标系的目标位姿信息。
32、第三个方面,在本实施例中提供了一种机器人系统,包括基座、机器人主体、激光雷达、臂外双目相机、臂上双目相机、机械臂以及处理器,所述激光雷达和所述臂外双目相机固定于机器人主体上的第一固定部位上,所述臂上双目相机固定于所述机械臂上的第二固定部位上;所述处理器与所述激光雷达、所述臂外双目相机、所述臂上双目相机以及所述机械臂通信连接;
33、所述激光雷达用于采集目标作业场景的第一测量数据;其中,所述目标作业场景包括目标电缆;
34、所述臂外双目相机用于采集所述目标作业场景的第二测量数据;
35、所述臂上双目相机用于采集的所述目标作业场景的第三测量数据;
36、所述处理器用于执行第一个方面所述的电缆抓取点的定位方法。
37、第四个方面,在本实施例中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面所述的电缆抓取点的定位方法。
38、与相关技术相比,在本实施例中提供的电缆抓取点的定位方法、装置和系统,通过获取由激光雷达采集的目标作业场景的第一测量数据;获取由臂外双目相机采集的目标作业场景的第二测量数据;根据第一测量数据和第二测量数据,确定目标抓取点相对于目标机器人基座标系的初始位姿信息;获取由臂上双目相机采集的目标作业场景的第三测量数据;根据第三测量数据,确定目标抓取点相对于目标机器人的机械臂末端座标系的目标位姿信息。解决了相关技术中电缆抓取点的定位精度低下的问题,提高了电缆抓取点的定位精度。
39、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!