一种用于带式输送机拆卸机器人的建模方法
本发明涉及用于带式输送机拆卸机器人的建模方法领域,具体涉及一种用于带式输送机拆卸机器人的建模方法。
背景技术:
1、带式输送机是一种常用于井工煤矿的重要物料运输设备,在工业生产过程中,随着设备老化、维护需求以及生产流程的变化,可能需要对带式输送机进行拆卸、维护、更换零部件等操作。传统的拆卸方法主要依靠人工操作,存在安全系数低、拆卸效率低下、难度大等问题,研究带式输送机智能化拆卸方法对提高井下生产安全和效率均具有重要意义。目前一些起重机械设备、多自由度的机械臂等均可实现低精度组件的拆卸作业,通常使用多自由度机械臂来进行拆卸任务,但对于大型、重量较大的带式输送机的拆卸任务,使用双机械臂比单机械臂更具有优势。双机械臂完成带式输送机拆卸任务时,存在任务复杂、运动耦合和多机械臂避障问题,导致双机械臂路径规划难度大。因此,通过对目标任务进行运动学建模,可以分析路径规划的可行性,缩小路径搜索空间,进行碰撞检测,这对机械臂路径规划非常重要,可以帮助解决路径规划困难。
2、申请号为cn201911184604.5的中国专利申请公开了一种基于安全保障策略的人机协作拆卸线平衡优化方法,按照拆卸任务的属性特征建立拆卸任务分类模型,建立拆卸任务分配方案;申请号为cn201911422134.1的中国专利申请公开了一种面向人机协作拆卸任务的知识图谱构建方法,通过知识图谱来建立人机协作拆卸任务的模型。上述已有专利的建模方法主要面向人机协作的拆卸任务,由于煤矿智能化和无人化是当前的发展趋势,使用多自由度机械臂代替技术工人执行拆卸作业对于提高煤矿安全生产作业具有重要意义。
技术实现思路
1、针对上述存在的技术不足,本发明的目的是提供一种用于带式输送机拆卸机器人的建模方法,其主要用于解决带式输送机拆卸机器人在作业时的运动学建模问题,对带式输送机整体拆卸流程进行设计;并对双臂纵梁拆卸工序进行运动学建模,将物体被机械臂推动时的状态分为三种并计算出物体倾覆临界条件,然后对双臂h架拆卸工序进行运动学建模,将其应用于机械臂运动规划中,可以准确地描述和预测带式输送机在拆卸过程中的各个部分的运动轨迹和位置,有助于规划和执行拆卸任务,并确保操作的准确性和安全性,最后通过双臂路径规划完成拆卸任务。
2、为解决上述技术问题,本发明采用如下技术方案:
3、本发明提供一种用于带式输送机拆卸机器人的建模方法,包括以下步骤:
4、步骤1、针对带式输送机拆卸任务进行拆卸流程设计,拆卸机器人需在带式输送机两侧对称设有两组六自由度机械臂;
5、步骤2、针对六自由度机械臂对其进行dh参数法运动学建模;
6、步骤3、对带式输送机中纵梁拆卸工序进行运动学建模;
7、步骤4、计算带式输送机中h架与机械臂推挤时的倾覆条件;
8、步骤5、对双机械臂拆卸h架工序进行运动学建模;
9、步骤6、通过双机械臂路径规划完成拆卸任务。
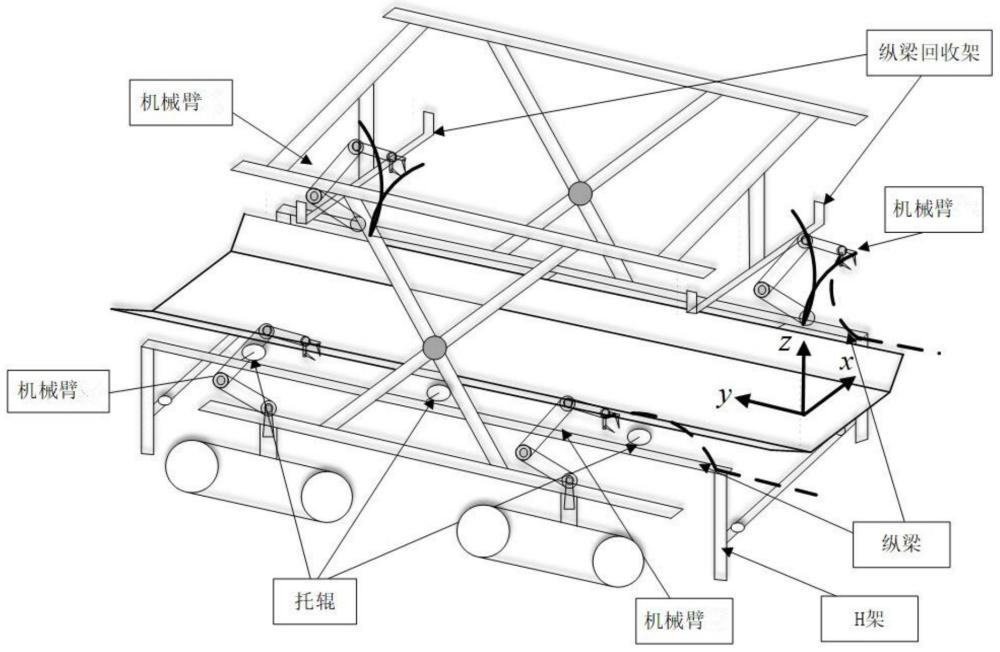
10、优选地,步骤1中选用的拆卸机器人包括上梁和能够行进的下梁,上梁和下梁之间通过十字架连接在一起,下梁沿着带式输送机长度方向的两侧分别设有两个机械臂,上梁的前后端设有两个纵梁回收架,下梁设有连通外部气源的举升气囊;拆卸过程为:
11、s11、拆卸带式输送机时,首先将举升气囊伸入输送带下方进行通气,通气后举升气囊鼓起从而将输送带抬起,然后利用机械臂抓紧三联辊脱销,抽出三联辊并放置在回收箱内;
12、s12、在一个拆卸单元的上托辊全部拆除后,拆卸机器人同侧的两个机械臂同时抓紧带式输送机的纵梁,取下并放置到纵梁回收架上;
13、s13、待两侧纵梁全部拆除后,两侧的四个机械臂合力将带式输送机的h架推倒,从一侧拉出,最后回收举升气囊;
14、优选地,步骤3具体包括:
15、s31、经过对六自由度机械臂进行运动学建模后,得到其末端执行器关于基坐标系的齐次变换矩阵;
16、s32、建立坐标系,定义h架顶端连线中点为世界坐标系原点,由机械臂l指向机械臂r为x轴正方向,传送带前进方向为y轴正方向,竖直向上为z轴正方向;其中主机械臂定义为机械臂r,从机械臂定义为机械臂l;
17、s33、两个机械臂末端相对于基坐标系的位置分别为和两机械臂的基坐标在世界坐标系的位置分别为和
18、s34、两机械臂末端执行器在世界坐标系下的位置分别为:
19、
20、
21、由齐次变换矩阵和式(1)-(2)可知两个机械臂的末端路径只与关节角度和基座位置有关,故在机械臂基座位置确定的情况下,两机械臂的末端路径关系由关节角度反映出来;
22、s35、纵梁拆卸任务由同侧的两个机械臂协作完成,两机械臂先由初始位姿运动到纵梁抓取点,再同步运动将纵梁搬运至中间的纵梁回收架上,运动过程中保证两机械臂的抓取点固定,即两臂末端的相对距离不变;
23、s36、在世界坐标系下,两机械臂的基座位置和存在关系:和当两机械臂的关节角度存在ql=qr时,根据齐次变换矩阵,有和此时满足:
24、
25、由齐次变换矩阵可知,两机械臂末端路径在x和z方向上相同,在y方向上保持△l的距离,两机械臂轨迹点个数和路径长度一致,适合操作长度大于两机械臂基座距离的物体,如纵梁的“拆卸-放置”作业。
26、优选地,步骤4具体包括:
27、s41、假设每个机械臂与物体之间的接触只有一个点,且机械臂只会从侧面推挤物体,物体在被机械臂推挤时,分为平移、晃动后恢复和倾覆三种运动状态;
28、s42、设h架的纵剖面的高和宽分别为l和2r,接触点的高度为zp,重心高度为h,h架的倾角为α,机械臂推挤h架的推挤距离为d;
29、s43、作用在h架上,使其绕xc点转动的力矩为fzp-mgr,在静力假设下,f最大为地面提供的摩擦力为μmg,当μmgzp-mgr<0,即时,h架会在机械臂的推挤下平移,当时,h架会在机械臂的推挤下倾斜;
30、s44、在准静力分析中,h架被推挤时,其支撑平面为h架与地面的接触点和h架与机械臂的接触点在水平面内投影构成的多边形,发生倾覆的前提是质心xo越过支撑点xc,当h架的质心处于h架与桌面的接触点正上方的时候,求得其倾覆的临界点为:
31、
32、当α>α临时,h架将会倾覆,此时机械臂的侵入深度d和倾角α关系为:
33、
34、对于双臂操作推倒h架作业时,机械臂末端位置条件为:
35、
36、优选地,步骤5具体包括:
37、s51、h架拆卸任务由两侧的机械臂协作完成,两机械臂由初始位姿运动到h架两侧zp高度,再沿接触点xp到xp′直线运动,运动过程中两机械臂末端运动轨迹关于平面x=0对称;
38、s52、在世界坐标系下,两机械臂的基座位置和存在关系为:和当两机械臂的关节角度存在ql=-qr时,根据式(1),有和此时满足:
39、
40、两机械臂末端轨迹关于平面x=0对称,两机械臂轨迹点个数和路径长度一致,适合操作长度小于两机械臂基座距离的物体,如h架推倒作业。
41、本发明的有益效果在于:
42、1)对机械臂拆卸带式输送机整体流程进行合理设计,有利于提高工作效率、降低工作风险、提高工作质量,同时还能优化资源利用和方便管理和监控;
43、2)对双机械臂拆卸带式输送机中纵梁拆卸工序进行运动学建模,有利于优化机器人路径规划、确定机器人可达性、辅助机器人运动控制以及预测碰撞和冲突,有利于提高拆卸操作的效率、准确性和安全性,为机器人在纵梁拆卸过程中提供指导和支持;
44、3)对带式输送机纵梁、h架拆卸工序进行运动学建模有利于减少拆卸时间、提高拆卸精度、优化设备利用、避免碰撞和冲突,以及优化人机协作,有利于提高拆卸工序的效率、安全性和质量,为拆卸操作提供指导和支持。
- 还没有人留言评论。精彩留言会获得点赞!