内外螺纹丝杠的单动力源伸缩机械夹爪结构及控制方法与流程
本发明涉及机械结构,特别是涉及一种内外螺纹丝杠的单动力源伸缩机械夹爪结构及控制方法。
背景技术:
1、现有可伸缩的机械夹爪结构均采用双动力源形式,第一动力源控制夹爪轴向伸缩,第二动力源控制夹爪张开及闭合。而上述形式的机械夹爪,往往空间尺寸大、控制难度高、走线困难。同时,目前大多机械夹爪的夹爪采用平行式布置方式,占用空间较大,不适用于小型机器结构。且现有水下使用的机械夹爪将整体密封处理,该结构形式在伸缩时会承受较大的真空载荷,使动力源负载较大。
2、故本发明针对以往机械夹爪的缺陷,设计了一种内外螺纹丝杠的单动力源伸缩机械夹爪结构以及控制方法。
技术实现思路
1、针对上述现有技术的不足,本专利申请所要解决的技术问题是如何提供一种能够大幅度节省结构空间尺寸,降低结构重量以及走线难度,密封效果好的内外螺纹丝杠的单动力源伸缩机械夹爪结构及控制方法。
2、为了解决上述技术问题,本发明采用了如下的技术方案:
3、一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,包括伸缩传动结构和抓取结构;
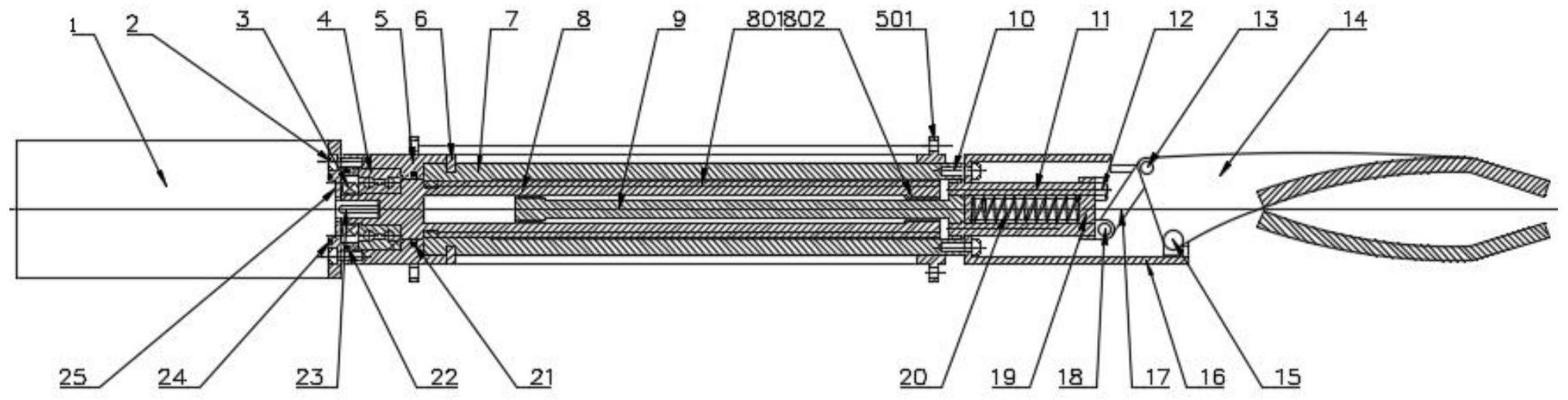
4、所述伸缩传动结构包括电机、轴承、外壳、限位轴、外螺母、丝杠、内螺母和电机端盖;
5、所述电机与电机端盖和外壳固定连接,所述电机的输出轴与丝杠传动连接,丝杠通过轴承安装在外壳内,所述丝杠沿轴向的外侧设置有外螺纹,所述丝杠沿轴向内侧设置有通孔,所述丝杠沿轴向内侧远离电机的端部设置有内螺纹,所述丝杠的外侧螺纹连接有外螺母,所述丝杠的内侧设置有能够给与内螺纹进行螺纹连接的内螺母,所述外螺母靠近电机的端部固定安装有限位轴,所述外壳沿轴线开设有与限位轴滑动配合的滑槽;
6、所述抓取结构包括连接杆、固定螺母、两个夹爪、夹爪外壳、两个连杆、安装板和弹簧;
7、所述夹爪外壳与外螺母固定连接,所述内螺母与连接杆螺纹连接,所述连接杆远离内螺母的端部穿过安装板且与固定螺母连接,所述连接杆能够在夹爪外壳的通孔内滑动,所述弹簧的伸缩方向的两端分别连接夹爪外壳和安装板,所述安装板与两个连杆铰接,所述连杆与夹爪铰接,所述夹爪与夹爪外壳铰接,两个夹爪正对设置。
8、优选的,所述电机与电机端盖之间设置有静密封,电机端盖与外壳之间设置有静密封,丝杠与外壳之间设置有动密封。
9、优选的,所述轴承为双列角接触轴承,所述双列角接触轴承的两端分别由丝杠的轴肩和圆螺母定位。
10、优选的,所述电机的输出轴通过平键与丝杠连接。
11、优选的,所述安装板与连杆通过第一销轴铰接、连杆与夹爪通过第二销轴铰接、夹爪与夹爪外壳通过第三销轴铰接。
12、优选的,所述电机通过第一螺钉与电机端盖和外壳固定连接。
13、优选的,所述外壳的外侧两端均固定安装有连接法兰。
14、优选的,所述夹爪外壳与外螺母通过第二螺钉固定连接。
15、本发明还公开了一种内外螺纹丝杠的单动力源伸缩机械夹爪结构的控制方法,包括以下步骤:
16、s1、电机带动丝杠旋转,使外螺母轴向伸出,该过程内螺母跟随轴向伸出;
17、s2、电机继续旋转,弹簧拖动内螺母与丝杠内螺纹啮合;
18、s3、丝杠外螺纹和内螺纹螺距不同,丝杠每转一转内外螺纹行程出现差,电机继续旋转,因内外螺纹行程差安装板与夹爪外壳间距离减小,弹簧被压缩;安装板带动连杆和夹爪,实现夹爪的张开;
19、s4、反之,电机反转安装板与夹爪外壳间距离增大,直至内螺纹与内螺母脱离,实现夹爪闭合;
20、s5、电机继续反转,外螺母轴向缩回至初始状态,整个夹爪机构工作完毕。
21、综上,本内外螺纹丝杠的单动力源伸缩机械夹爪结构及控制方法具有以下
22、有益效果:
23、1、在单动力源前提下,通过丝杠外螺纹控制夹爪轴向伸缩,丝杠内外螺纹行程差实现夹爪张开及闭合,大幅度节省了结构空间的尺寸,降低了结构重量及走线难度;
24、2、采用剪式夹爪结构,在有限的空间内机械夹爪张开尺寸更大;
25、3、弹簧结构为内螺母提供轴向拉力,提高了内螺纹啮合效率;并且在外螺母轴向伸出时拖动内螺母跟随伸出;
26、4、通过动密封和静密封做密封处理,伸缩部分工作时可免受真空压强载荷,使机械夹爪能适应水下工作环境。
技术特征:
1.一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,包括伸缩传动结构和抓取结构;
2.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述电机与电机端盖之间设置有静密封,电机端盖与外壳之间设置有静密封,丝杠与外壳之间设置有动密封。
3.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述轴承为双列角接触轴承,所述双列角接触轴承的两端分别由丝杠的轴肩和圆螺母定位。
4.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述电机的输出轴通过平键与丝杠连接。
5.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述安装板与连杆通过第一销轴铰接、连杆与夹爪通过第二销轴铰接、夹爪与夹爪外壳通过第三销轴铰接。
6.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述电机通过第一螺钉与电机端盖和外壳固定连接。
7.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述外壳的外侧两端均固定安装有连接法兰。
8.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构,其特征在于,所述夹爪外壳与外螺母通过第二螺钉固定连接。
9.根据权利要求1所述的一种内外螺纹丝杠的单动力源伸缩机械夹爪结构的控制方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种内外螺纹丝杠的单动力源伸缩机械夹爪结构及控制方法,电机带动丝杠旋转,使外螺母轴向伸出,该过程内螺母跟随轴向伸出;电机继续旋转,弹簧拖动内螺母与丝杠内螺纹啮合;丝杠外螺纹和内螺纹螺距不同,丝杠每转一转内外螺纹行程出现差值,电机继续旋转,因内外螺纹行程差安装板与夹爪外壳间距离减小,弹簧被压缩;安装板带动连杆和夹爪,实现夹爪的张开;反之,电机反转安装板与夹爪外壳间距离增大,直至内螺纹与内螺母脱离,实现夹爪闭合;电机继续反转,外螺母轴向缩回至初始状态,整个夹爪机构工作完毕。本申请具有能够大幅度节省结构空间尺寸,降低结构重量以及走线难度,密封效果好的优点。
技术研发人员:王华琳,张应,姚单,黄令,李想,陈凯,樊绪,姜波,王军
受保护的技术使用者:中船重工(重庆)西南装备研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!