海洋固体塑料垃圾清理的模块化水下机械臂、工作方法
本发明涉及载臂无人潜航器,具体涉及一种海洋固体塑料垃圾清理的模块化水下机械臂、工作方法。
背景技术:
1、海洋垃圾污染已经成为威胁世界各大洋生态平衡与安全的关键问题,其中80%以上的垃圾由塑料组成,大量可见塑料污染物漂浮在海洋中成为威胁海洋生物生存的致命“毒药”。海洋环境复杂、人工介入困难是一直以来困扰人类清理海洋固体塑料垃圾的关键因素。
2、载臂无人潜航器是指能够进行海底环境监测,海底巡逻侦察和海底无人作业的智能化平台。
3、无人潜航器为人类提供了探索与保护海洋的平台,但目前多数国内外无人潜航器主要用于监测型海洋任务,并未配备水下机械臂,这使得无人潜航器缺失了在海洋中进行作业的操作功能。此外,由于海洋特殊的应用场景,水下机械臂必须具有极佳的防水与密封条件,这使得多数水下机械臂采用一体化结构,功能与应用场景单一,维修难度大,无法满足载臂无人潜航器在海洋复杂环境中,清理固体塑料垃圾的多样化需求。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中的无法满足载臂无人潜航器在海洋复杂环境中,清理固体塑料垃圾的多样化需求的问题,从而提供一种海洋固体塑料垃圾清理的模块化水下机械臂。
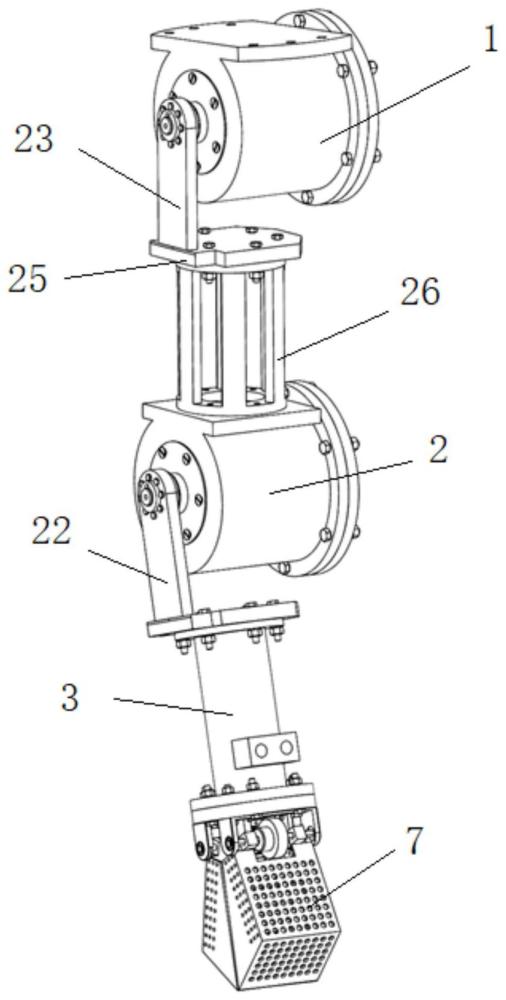
2、为了解决上述技术问题,本发明提供了一种海洋固体塑料垃圾清理的模块化水下机械臂,包括:肩关节结构,所述肩关节结构具有第一转动方向;肘关节结构,设于所述肩关节结构的一端,所述肘关节结构与所述肩关节结构平行设置或垂直设置,所述肘关节结构与所述肩关节结构垂直设置时,所述肘关节结构具有第二转动方向;末端执行器,设于所述肘关节结构远离所述肩关节结构的一端,所述末端执行器包括末端驱动机构和传动机构、手爪连接件、以及手爪,所述传动机构与末端驱动机构连接,所述手爪连接件与传动机构连接,所述手爪设于所述手爪连接件上,所述末端驱动机构驱动所述传动机构转动,并带动所述手爪做打开或闭合动作。
3、进一步地,所述传动机构包括:蜗杆,设于所述末端驱动机构的一端部;蜗轮,具有两个,设于所述手爪连接件上,且对称设于所述蜗杆的两侧,两个所述蜗轮的旋转方向相反。
4、进一步地,所述手爪连接件包括:架体,与所述传动机构连接,所述架体具有两个夹持端;连接轴,设于所述架体的夹持端上,所述蜗轮和手爪均套设于所述连接轴上。
5、进一步地,所述架体还包括容纳部,所述容纳部设于两个所述夹持端之间,所述容纳部用于容纳所述蜗轮。
6、进一步地,所述末端驱动机构包括:末端壳体,所述末端壳体内设有末端驱动件,所述末端驱动件的末端输出轴与所述蜗杆连接;末端端盖,设于所述末端壳体的两端,所述末端输出轴贯穿一所述末端端盖。
7、进一步地,所述肩关节结构和肘关节结构均包括:关节壳体,所述关节壳体内设有关节驱动件,所述关节驱动件上设有关节输出轴;关节端盖,设于所述关节壳体的两端,所述关节输出轴贯穿一所述关节端盖。
8、进一步地,还包括第一连接件,所述第一连接件设于肩关节结构和肘关节结构、以及末端执行器之间。
9、进一步地,第一连接件包括:第一传动肋板,所述第一传动肋板与关节输出轴通过键连接;第二传动肋板,与所述第一传动肋板垂直设置,所述第二传动肋板用于连接关节壳体和末端壳体。
10、进一步地,还包括第二连接件,所述第二连接件设于第一连接件上,且位于肩关节结构和肘关节结构之间。
11、还包括一种采用所述的海洋固体塑料垃圾清理的模块化水下机械臂的工作方法,包括:
12、肩关节结构绕第一转动方向进行转动,肘关节结构绕第一转动方向或第二转动方向进行转动,末端执行器可以直接对海洋固体塑料垃圾进行清理,通过驱动机构带动传动机构作动,由于传动机构设置在手爪连接件上,因此,可以利用末端传动机构驱动手爪做打开或者闭合的动作,并对清理海洋固体塑料垃圾进行清理。
13、本发明技术方案,具有如下优点:
14、1.本发明提供的海洋固体塑料垃圾清理的模块化水下机械臂,包括:肩关节结构,所述肩关节结构具有第一转动方向;肘关节结构,设于所述肩关节结构的一端,所述肘关节结构与所述肩关节结构平行设置或垂直设置,所述肘关节结构与所述肩关节结构垂直设置时,所述肘关节结构具有第二转动方向;末端执行器,设于所述肘关节结构远离所述肩关节结构的一端,所述末端执行器包括末端驱动机构和传动机构、手爪连接件、以及手爪,所述传动机构与末端驱动机构连接,所述手爪连接件与传动机构连接,所述手爪设于所述手爪连接件上,所述末端驱动机构驱动所述传动机构转动,并带动所述手爪做打开或闭合动作。
15、通过在肩关节结构上设置肘关节结构,并且,该肩关节结构具有第一转动方向,其中,肩关节结构与肘关节结构平行设置,此时,只有一个转动方向。当需要该海洋固体塑料垃圾清理的模块化水下机械臂具有两个转动方向时,则可以将肘关节结构与肩关节结构垂直设置,即可以得到第二转动方向,具体地,可以根据实际情况自行设定。在肘关节结构的底部设置末端执行器,该末端执行器可以直接对海洋固体塑料垃圾进行清理,具体操作为,通过末端驱动机构带动传动机构作动,该传动机构设置在手爪连接件上,利用传动机构驱动手爪做打开或者闭合的动作,从而实现了该手爪清理海洋固体塑料垃圾的目的。
16、其中,肩关节结构和肘关节结构为模块化,用于拓展水下机械臂自由度与操作空间,并传递运动的关节与臂杆一体化模块,以及用于不同作业操作任务的末端执行器模块。
17、该海洋固体塑料垃圾清理的模块化水下机械臂可以根据实际任务场景的需要增加一定数量,为水下机械臂添加一定数量的自由度,扩展任务空间。模块化设计的结构,提高了每个结构的利用效率,可以量产,一次性研发投入,备件种类少,成本能够得到有效控制。
18、2.本发明提供的海洋固体塑料垃圾清理的模块化水下机械臂,所述传动机构包括蜗杆,蜗杆设于所述末端驱动机构的一端部;蜗轮具有两个,两个蜗轮设于所述手爪连接件上,且对称设于所述蜗杆的两侧,两个所述蜗轮的旋转方向相反。
19、通过蜗杆的设置,并且该蜗杆与末端驱动机构连接,即可以通过末端驱动机构带动蜗杆进行转动,同时,由于蜗轮设置在蜗杆的两侧,并且,两个蜗杆的旋转方向相反,因此,通过该蜗杆的转动,进而带动了设置在蜗杆两侧的蜗轮进行转动,从而实现了手爪的打开或闭合动作。
20、3.本发明提供的海洋固体塑料垃圾清理的模块化水下机械臂,所述手爪连接件包括架体和连接轴;其中,架体与所述传动机构连接,所述架体具有两个夹持端;连接轴设于所述架体的夹持端上,所述蜗轮和手爪均套设于所述连接轴上。
21、通过架体的设置,从而实现了该手爪连接件与传动机构的连接,同时,架体上夹持端的设置,为连接轴提供了安装位置,即便于将蜗轮和手爪安装在连接轴上。
22、4.本发明提供的海洋固体塑料垃圾清理的模块化水下机械臂,所述架体还包括容纳部,所述容纳部设于两个所述夹持端之间,所述容纳部用于容纳所述蜗轮。
23、通过容纳部的设置,从而便于将蜗轮安装在手爪连接件上,并且,该容纳部位蜗轮提供了容纳空间。
24、提供
技术实现要素:
部分是为了以简化的形式来介绍对概念的选择,它们在下文的具体实施方式中将被进一步描述。发明内容部分无意标识本公开的重要特征或必要特征,也无意限制本公开的范围。
- 还没有人留言评论。精彩留言会获得点赞!