一种人工智能机械手及其使用方法与流程
本技术涉及机械手,更具体地说,涉及一种人工智能机械手及其使用方法。
背景技术:
1、机械手在自动化车间中用来运送物料,从事焊接、喷漆、装配等工艺操作,可将操作工人从繁重、单调、重复的体力劳动中解放出来。特别是在高温、危险、有害的作业环境(放射性、有毒气体、粉尘、易燃、易爆、强噪声等)中,可用机械手代替人的部分操作。目前,机械手已广泛应用于铸造、锻造、冲压、切削加工、喷漆、装配等各种工艺过程中。
2、现有技术中公开号为cn215548675u的专利文献提供一种人工智能机械手臂。
3、相关技术中,通过结构光模组可在夹取之前对产品进行识别,自动切换到相对应的夹取模式,通过距离传感器可提升夹取时的准确度,通过物联网芯片可将机械手臂之间进行组网,工作人员进行一次设定即可同步到所有机械手臂。
4、针对上述中的相关技术,发明人认为该装置机械爪为以一点为圆心的转动夹持,如此不仅夹持需要较大的力,对被夹持的物体施加的力也会较大,可能会导致物体损坏。
5、此外现有的智能机械手通常采用齿轮组和齿条转动的传动实现对两个对称的夹爪的咬合与松开控制,例如现有专利技术中的cn115607293a,cn115781749a,cn217861314u,但是该种设计通常在咬合后会发生晃动,使得夹持不稳,且在进行加持后容易发生反向转动,使得夹紧不够稳定。
6、因此,存在可能会导致物体损坏的缺陷。
7、鉴于此,我们提出一种人工智能机械手。
技术实现思路
1、为了改善可能会导致物体损坏的缺陷,本技术提供一种人工智能机械手。
2、本技术提供的一种人工智能机械手,采用如下的技术方案:
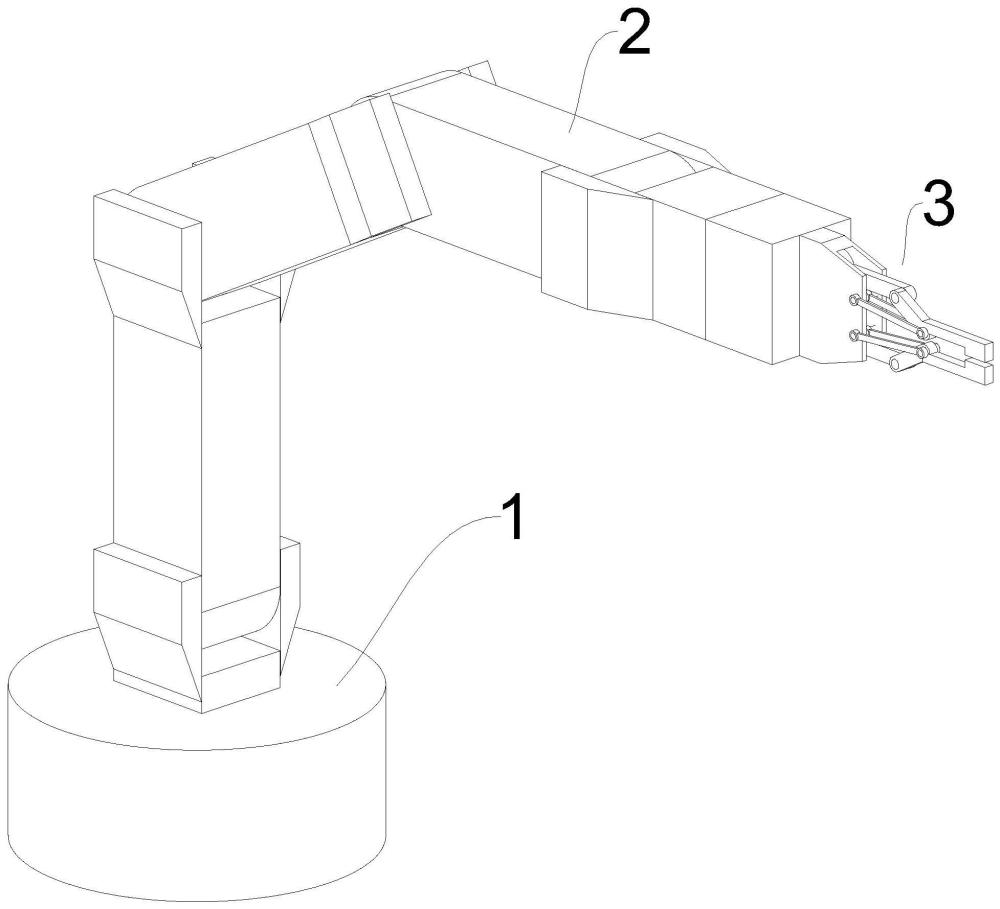
3、一种人工智能机械手,包括基座;
4、大臂,所述大臂转动安装于基座中部;
5、夹持爪,所述夹持爪设置于大臂端部,且所述夹持爪包括转动框,所述转动框内部转动连接有转杆,所述转杆端部转动连接有倾杆,所述倾杆端部连接固定有夹持杆,所述夹持杆端部转动连接有定位框,所述定位框另一端与转动框转动连接,所述倾杆与夹持杆呈钝角连接。
6、通过采用上述技术方案,夹持爪中多个连杆的联动设计,可以使夹持杆的张开及闭合时两端均保持同步运动,也就是说夹持杆两端会与规则的物体同时接触,如此就可以增加夹持爪的夹持面积,避免了现有技术中机械爪以一点为圆心的转动夹持效果不佳的问题。
7、优选地,所述转杆上连接固定有第一半齿轮,两个所述第一半齿轮内方啮合连接有齿杆,所述齿杆外方啮合连接有控制件。
8、通过采用上述技术方案,齿杆可以同步带动两个第一半齿轮转动,如此就可以保证两个夹持杆的同步开合。
9、优选地,所述控制件包括与齿杆啮合连接的第二半齿轮,所述第二半齿轮上连接固定有控制电机,所述控制电机外方安装固定有防护框,所述防护框与转动框连接固定。
10、通过采用上述技术方案,控制电机及第二半齿轮的设计,可以带动齿杆移动固定的一段距离,也就是可以带动夹持爪闭合夹持物体。
11、优选地,所述控制件还包括与齿杆连接固定的滑块,所述滑块内部滑动连接有滑杆,所述滑杆上套设有复位弹簧,所述复位弹簧两端分别与防护框内壁及滑块连接固定。
12、通过采用上述技术方案,复位弹簧的设计,可以在第二半齿轮转动至不与齿杆接触时,带动齿杆快速复位,此时夹持爪随之被带动张开,而在控制电机正反转带动第二半齿轮转动,此时复位弹簧的设计,就可以使第二半齿轮带动齿杆的移动更加稳定,不会出现晃动等动作。
13、优选地,所述第二半齿轮边缘连接固定有拨轴,所述拨轴外方滑动配合有抵接杆,所述抵接杆呈l型结构。
14、通过采用上述技术方案,抵接杆及拨轴的设计,可以使第二半齿轮与齿杆精确啮合。
15、优选地,所述防护框内壁开设有通槽,所述通槽内部安装固定有卡接件,所述卡接件包括滑动连接于通槽内部的卡接块,所述卡接块内部连接固定的弹压弹簧,且所述齿杆外壁开设有两个卡接槽,所述卡接块与卡接槽卡接配合。
16、通过采用上述技术方案,卡接件的设计,可以在复位弹簧带动齿杆快速复位后,通过卡接块与齿杆的抵接摩擦及卡接,就可以实现齿杆快速稳定,避免齿杆长时间的晃动。
17、优选地,所述防护框外方转动连接有连接框,所述连接框内部安装固定有转动件。
18、优选地,所述转动件包括与连接框安装固定的转动电机,所述转动电机输出轴连接固定有输出齿轮,所述输出齿轮外方啮合连接有输入齿轮,所述输入齿轮上连接固定有旋转杆,所述旋转杆端部连接固定有拨动轴,所述拨动轴外方滑动配合有多个滑轨,多个所述滑轨外端连接固定有圆框,所述圆框中部连接固定有传动轴,所述传动轴与防护框连接固定,所述输入齿轮通过固定柱与连接框转动连接。
19、通过采用上述技术方案,转动件的设计,可以带动防护框进行等角度的转动,也就是可以使防护框每次转动均为90°,如此就可以快速对货物进行转动摆放,或者转动夹持爪对货物进行不同角度的夹持,且使用转动件带动物体转动后夹持爪稳定性较高,避免了现有技术直接使用电机驱动稳定性不佳的问题。
20、优选地,所述转动件还包括与旋转杆另一端连接固定的限位块,所述限位块外方滑动配合有多个限位框,所述限位框连接固定于圆框上,且所述限位框与滑轨等距交错放置。
21、其中夹持爪中多个连杆的联动使夹持杆的张开及闭合时两端均保持同步运动,该运动过程中夹持杆两端会与规则的物体同时接触,转动件带动防护框进行等角度的转动,货物摆放出错时,快速转动夹持爪对货物更换角度的夹持,复位弹簧在使用中需要闭合的夹持爪快速张开时,通过第二半齿轮与齿杆啮合结束,使齿杆失去第二半齿轮限位,然后复位弹簧就会通过滑块带动齿杆快速移动,夹持爪就会被快速打开,且在齿杆移动过程中,齿杆上的卡接槽内会卡接进入卡接块以消除齿杆被复位弹簧带动后的晃动。
22、通过采用上述技术方案,限位块配合限位框的设计,可以对转动后的圆框进行限位,避免其由于惯性继续转动,也保证了转动件转动的精确性。
23、本技术还公开了前述的人工智能机械手的使用方法,包括:
24、s1、使用中,控制件控制夹持爪张开对物体进行夹持,此时夹持爪为水平向内移动夹持物体;
25、s2、随后物体被大臂送入到指定地点,然后可以通过转动件对夹持爪角度进行调节,可以使物体更精确的放置到指定位置;
26、s3、最后控制件控制夹持爪张开,随后卡接件对齿杆进行定位,避免其被带动过度移动。
27、3.有益效果
28、综上所述,本技术包括以下至少一种有益技术效果:
29、1.本技术通过夹持爪中多个连杆的联动设计,可以使夹持杆的张开及闭合时两端均保持同步运动,也就是说夹持杆两端会与规则的物体同时接触,如此就可以增加夹持爪的夹持面积,避免了现有技术中机械爪以一点为圆心的转动夹持效果不佳的问题。
30、2.本技术通过复位弹簧的设计,在使用中需要闭合的夹持爪快速张开时,通过第二半齿轮与齿杆啮合结束,使齿杆失去第二半齿轮限位,然后复位弹簧就会通过滑块带动齿杆快速移动,而夹持爪就会被快速打开,如此就可以压缩夹持爪张开时间,快速对物体进行夹持,效率较高,且在齿杆移动过程中,齿杆上的卡接槽内会卡接进入卡接块,随着卡接块的卡接限位,齿杆可以快速稳定,避免了齿杆被复位弹簧带动后的晃动,使夹持爪可以快速稳定夹持物体。
31、3.本技术通过转动件的设计,可以带动防护框进行等角度的转动,也就是可以使防护框每次转动均为90°,如此可以对需要转动摆放的货物精确进行转动摆放,或在货物摆放出错时,快速转动夹持爪对货物更换角度的夹持,转动件不仅在带动物体转动后,夹持爪稳定性较高且相应速度也较快,最后避免了现有技术直接使用电机驱动稳定性不佳的问题。
- 还没有人留言评论。精彩留言会获得点赞!