机械手的制作方法
本发明涉及灵巧手,具体而言,涉及一种机械手。
背景技术:
1、相关技术中,连杆直驱灵巧手通常结构复杂,以使灵巧手具有多个自由度,满足抓取动作,然而灵巧手没有对抓握能力做区分,在实际抓取时,灵巧手主要依靠部分手指,其他部分处于辅助抓握的状态,导致灵巧手仍然不够灵巧轻便,存在改进的空间。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种机械手,所述机械手更加灵巧轻便。
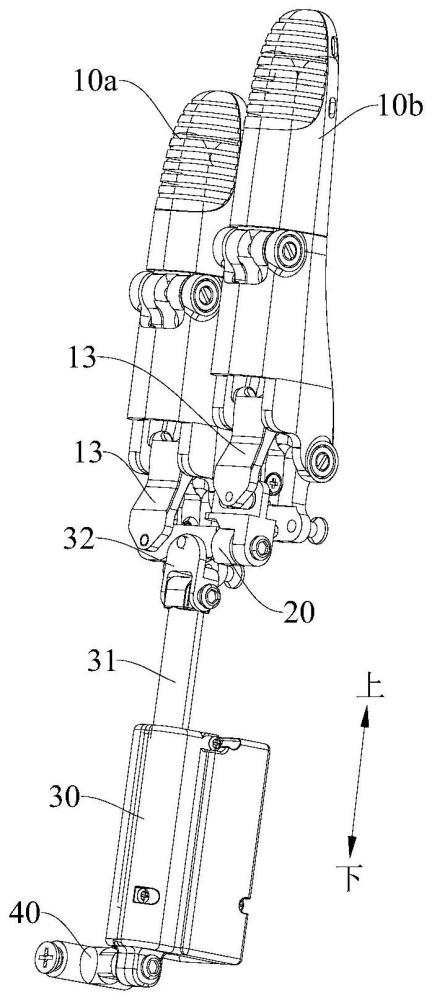
2、根据本发明实施例的机械手,包括:基座;多个手指,多个所述手指间隔布置在所述基座上,每个所述手指与所述基座转动连接,每个所述手指的靠近所述基座的一端设有连接件;第一驱动件,所述第一驱动件安装在所述基座上且包括可伸缩的推杆;连接模块,所述连接模块设在所述第一驱动件的所述推杆的末端,且所述连接模块与至少两个所述手指的所述连接件连接,以使所述至少两个手指联动。
3、根据本发明实施例的机械手,第一驱动件的推杆末端可以通过连接模块连接至少两个手指的连接件,使得至少两个手指可以在第一驱动件的驱动下联动,由此在实现多个手指活动的基础上,可以减少驱动件的数量,简化机械手的结构,减少机械手的重量和制造成本,且机械手可以根据需求控制多个手指的具体连接形式,使机械手更加灵巧轻便。
4、在一些实施例中,所述连接模块包括连接杆,所述连接杆与所述连接件转动连接,所述连接杆与所述推杆的末端可转动连接。
5、在一些实施例中,所述连接模块包括连接杆和连接臂,所述连接臂包括旋转部和连接部,所述旋转部套设于所述连接杆上且可围绕所述连接杆转动,所述连接部与所述连接件连接,所述连接杆与所述推杆的末端可转动连接。
6、在一些实施例中,所述连接臂的连接部设有滑槽,所述连接件上设有固定轴,所述固定轴穿过所述滑槽且与所述滑槽滑动配合。
7、在一些实施例中,所述连接模块包括连接杆,或所述连接模块包括转动连接的连接杆和连接臂,至少一个所述连接杆与对应的所述连接件转动连接,且至少一个所述连接臂与对应的所述连接件转动连接;或者,所述至少两个手指对应的连接件,均与所述连接杆转动连接;或者,所述至少两个手指对应的连接件,均与所述连接臂转动连接。
8、在一些实施例中,所述手指包括第一指段和第二指段,所述第二指段位于所述第一指段的远离所述基座的一端,所述第一指段上设有所述连接件,其中,所述第一指段和所述连接件中的一个具有限位轨道,所述第一指段和所述连接件中的另一个具有限位块,所述限位块适于插接至所述限位轨道且可与所述限位轨道滑动配合。
9、在一些实施例中,所述第一指段限定有中空的避让腔,所述限位轨道设在所述第一指段上且与所述避让腔连通,所述连接件的一端适于插入所述避让腔内,且所述连接件的所述一端设有所述限位块。
10、在一些实施例中,所述第一指段的一端与所述基座转动连接,所述第一指段的另一端与所述第二指段转动连接,所述第二指段通过连杆与所述基座转动连接;和/或,每个所述手指包括至少一个所述第二指段,其中,所述至少一个第二指段并联布置,且每个所述第二指段与所述第一指段的另一端转动连接,或,所述至少一个第二指段串联布置,一个所述第二指段与所述第一指段的另一端转动连接,相邻两个所述第二指段转动连接。
11、在一些实施例中,还包括:第一安装件,所述第一安装件与所述第一驱动件和所述基座连接,用于将所述第一驱动件安装在所述基座上,所述第一安装件与所述第一驱动件绕一轴线可转动连接,且所述第一安装件与所述基座绕另一轴线可转动连接,两个所述轴线的延伸方向垂直。
12、在一些实施例中,还包括第二驱动件,所述第一驱动件通过所述连接模块与多个所述手指中的一部分连接,所述第二驱动件的数量与多个所述手指中的另一部分的数量相同,每个所述第二驱动件与多个所述手指中的另一部分的每个所述手指连接,所述第二驱动件和所述基座转动连接。
13、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种机械手,其特征在于,包括:
2.根据权利要求1所述的机械手,其特征在于,
3.根据权利要求1所述的机械手,其特征在于,
4.根据权利要求3所述的机械手,其特征在于,
5.根据权利要求2或3所述的机械手,其特征在于,所述连接模块包括连接杆,或所述连接模块包括转动连接的连接杆和连接臂,
6.根据权利要求1所述的机械手,其特征在于,
7.根据权利要求6所述的机械手,其特征在于,
8.根据权利要求6所述的机械手,其特征在于,
9.根据权利要求1所述的机械手,其特征在于,
10.根据权利要求1所述的机械手,其特征在于,
技术总结
本发明公开了一种机械手,包括:基座;多个手指,多个手指间隔布置在基座上,每个手指与基座转动连接,每个手指的靠近基座的一端设有连接件;第一驱动件,第一驱动件安装在基座上且包括可伸缩的推杆;连接模块,连接模块设在第一驱动件的推杆的末端,且连接模块与至少两个手指的连接件连接,以使至少两个手指联动。根据本发明实施例的机械手,第一驱动件的推杆末端可以通过连接模块连接至少两个手指的连接件,使得至少两个手指可以在第一驱动件的驱动下联动,由此在实现多个手指活动的基础上,可以减少驱动件的数量,简化机械手的结构,减少机械手的重量和制造成本,且机械手可以根据需求控制多个手指的具体连接形式,使机械手更加灵巧轻便。
技术研发人员:周成军,黄诗轩,郑存远
受保护的技术使用者:广州小鹏汽车科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!