一种工业生产用智能化机械手臂的制作方法
本发明涉及搬运机械臂的安全防护装置,具体为一种工业生产用智能化机械手臂。
背景技术:
1、工业生产中需要智能化机械手臂辅助完成很多传统需要人工操作的步骤,如上下料机械臂,搬运机械臂或者焊接机械臂,其中搬运机械臂通过在机械臂的动端上安装吸盘,通过吸盘吸附搬运的物料,而后通过机械臂移动吸盘使得物料从下料端移动至堆叠工位处,完成自动下料堆叠搬运的动作;
2、根据现有中国专利cn209812316u公开的一种搬运机械臂,包括旋转盘、升降杆以及安装在升降杆上的伸缩轴,伸缩轴一端通过减震组件固定安装有夹紧机构,旋转盘和升降杆之间通过第一关节机构相连接,第一关节机构上的气动管贯穿旋转盘并延伸至升降杆和伸缩轴之间的第二关节机构,旋转盘底部通过滚珠滑件连接有与滚珠滑件相适配的导轨,夹紧机构包括三角爪和与位于三角爪中心位置处的定位轴,三角爪外壁边缘处通过滚动带连接有转轴,转轴与三角爪夹紧物品后通过调节螺栓固定,定位轴一端通过拉动杆连接有伸缩轴。有益效果:本装置灵活性强,能够根据物品大小而调节夹紧机构,气动件之间能够实现独立工作,避免发生故障影响到其它部件使用;
3、根据现有中国专利cn210685578u公开的一种机械臂工作时的安全围栏,包括机械臂四周围成的防护网,位于防护网内侧的可调节清理装置,位于防护网之间的隔离板,位于隔离板与防护网之间的一个检修门。本实用新型用于机械臂工作地点的四周,用于机械臂在工作时的一个保护装置,防止人们在运料时不小心误入机械臂的工作范围之内,造成人员伤害;
4、在进行板状物料的搬运堆叠工作时,由于板状物料体积较轻,机械臂的移动速度可以调节至较快,从而保证堆叠效率,但是由于机械臂运动过程中运动速度过快,如上述专利公开的一种搬运机械臂,其没有设置相应的安全防护结构,其动端在移动过程中触碰到人后不能够及时停止工作,依旧会按照既定轨迹进行移动,从而对人造成较大的伤害,现有技术通过在机械臂工位处设置如上述专利公开的一种机械臂工作时的安全围栏,从而实现安全防护的效果,但是围栏设置局限性较大,受场地大小以及各类设备的摆放位置影响因素较大,很多厂区不便于安装围栏,且围栏的占用了较大的面积,使得厂房空间利用率大大降低。
5、因此,有必要提供一种工业生产用智能化机械手臂解决上述技术问题。
技术实现思路
1、(一)解决的技术问题
2、为解决上述技术问题,本发明提供一种工业生产用智能化机械手臂。
3、(二)技术方案
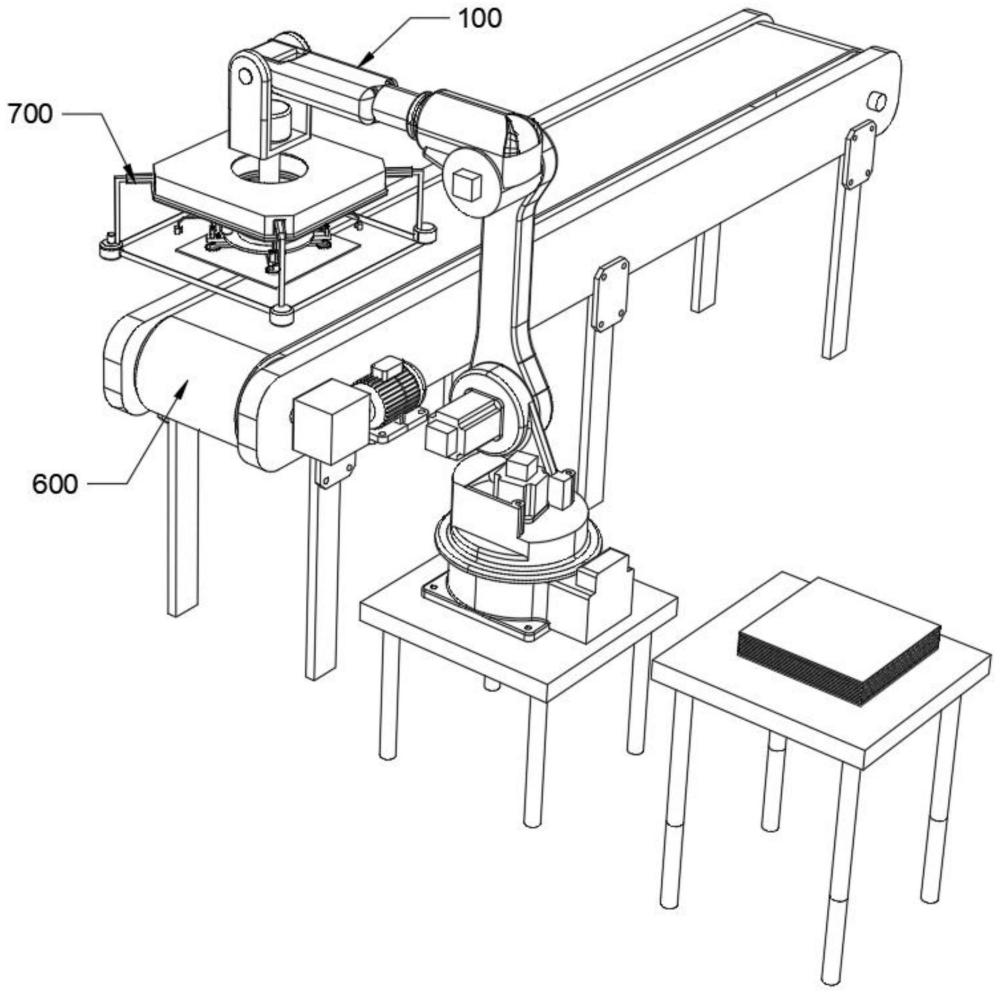
4、为实现以上目的,本发明通过以下技术方案予以实现:一种工业生产用智能化机械手臂,包括安装于机械臂动端上的安全防护装置,所述安全防护装置包括与机械臂动端固定的连接环,所述连接环的顶部滑动安装有中部形成有中空通孔的升降板,所述升降板上安装有用于在机械臂动端外围形成围栏并在机械臂动端移动过程中进行人员防护的防护机构,所述连接环上等角度间隔转动安装有若干个摄像头,所述升降板的底部安装有用于驱动摄像头翻转的翻转结构,所述升降板与连接环之间固定有升降机构。
5、优选的,所述升降板的底部对称固定有滑杆,所述连接环的顶部对称固定有滑套,所述滑套与滑杆的外壁滑动连接。
6、优选的,所述升降机构包括对称固定在升降板与连接环之间的两个电动推杆。
7、优选的,所述防护机构包括等角度间隔固定在所述升降板顶部的若干个滑环,所述滑环的内壁上滑动连接有扩张条,若干个所述扩张条相互背离的一端上均各自形成有沉孔,所述沉孔的内壁滑动连接有支撑条,所述沉孔的内壁上还固定有一个压力传感器,所述支撑条位于沉孔内侧的一端与压力传感器的外壁接触,所述支撑条背离压力传感器的一端固定有绳套,其中一个所述绳套的内壁上通过轴承转动连接有线轮,且安装有所述线轮的绳套的顶部固定有第一电机,所述第一电机的输出端通过轴承与绳套转动连接并贯穿绳套侧壁延伸至绳套内侧与线轮的端部固定,所述线轮的外壁上绕卷安装有防护绳,所述防护绳远离线轮的一端依次从若干个绳套的内侧穿过并与安装有线轮的一个绳套的外壁固定,所述连接环位于绳套所围成区域的正中间位置上,所述升降板的顶部还安装有用于同时驱动若干个扩张条移动的对中调节组件。
8、优选的,所述对中调节组件包括通过轴承转动连接在所述升降板顶面中部位置上的齿圈,固定在所述升降板底面的第二电机,所述第二电机的伸出端通过轴承与升降板转动连接,所述第二电机的伸出端贯穿升降板延伸至升降板的顶部固定有与齿圈啮合的齿轮,所述齿圈的外周上等角度固定有数量与扩张条数量相同的驱动环,还包括固定在所述扩张条背离支撑条一端外壁上的驱动柱,所述驱动柱插接在所述驱动环内侧。
9、优选的,所述摄像头还包括固定在其外壁上的翻转条,所述翻转条背离摄像头的一端固定有转轴,所述转轴通过轴承与连接环的外壁转动连接。
10、优选的,所述翻转结构包括等角度间隔固定在所述升降板底部的若干个顶推条,且每个顶推条对应一个摄像头,所述翻转条靠近转轴一侧的外壁上固定有呈倾斜状的拨动条,所述转轴的一端套设有扭力弹簧,所述扭力弹簧的一端与转轴的外壁固定另一端与连接环的外壁固定,所述连接环的外壁上等角度间隔固定有若干个限位柱,每个限位柱对应一个拨动条,且拨动条的底部与限位柱的外壁挤压接触,所述顶推条的下端通过滑孔滑动连接有拉动条,所述拉动条靠近拨动条一端的下沿呈弧形设置,所述拉动条背离拨动条的一端外侧套设有第二弹簧,所述第二弹簧的一端与拉动条的外壁固定另一端与顶推条的外壁固定。
11、优选的,所述拉动条靠近第二弹簧的一端外侧形成有圆环凸起部,所述圆环凸起部与顶推条的外壁挤压接触。
12、优选的,所述升降板的顶部固定有罩盖,所述滑环与罩盖固定。
13、优选的,所述顶推条的上端固定有加强筋,所述加强筋的顶部与升降板的底部固定。
14、(三)有益效果
15、本发明提供了一种工业生产用智能化机械手臂。与现有技术相比具备以下有益效果:
16、1、本发明通过设置安全防护装置,在工作时将安全防护装置设置于机械臂动端上,通过防护机构在机械臂动端外侧形成与机械臂动端共同移动的围栏,而构成围栏的防护绳位于最外侧,在机械臂动端移动时能够最先与人接触,受到压迫变形从而使得支撑条压迫压力传感器,压力传感器的压力变化数据传递到控制器,通过控制器则控制整个机械臂停止工作,起到了良好的安全防护工作,降低了机械臂工作过程中对人的危险系数,而安全防护装置应用于机械臂的动端,由于占地空间小,受到场地大小以及各类设备的摆放位置的影响更小,特别的能够在传统的围栏不便于架设时,在机械臂工作过程中进行安全防护工作,弥补了围栏防护的不足;
17、2、本技术提供的安全防护装置通过设置可翻转的摄像头以及驱动摄像头翻转的翻转结构,在每次机械臂动端移动至板材传送装置处进行板材的吸取工作时,升降机构会驱动防护机构上移,使得防护结构位于机械臂动端的吸盘的上方空间处,避免防护机构对吸盘正常吸附工作形成阻碍,直至吸附板材并上升移动距离后再次驱动防护机构下降将板材围住从而进行防护工作,而在驱动防护机构上移的过程中,翻转结构受到升降板上移的驱动使得摄像头翻转至正对机械臂动端上的吸盘,而后复位,如此则能够在每次吸取板材前自动对吸盘的外观进行一次检测工作,相较于传统的在每日工作结束采用人工观察的方式对吸盘外观进行检测而言,节省了人力,提高了检测的准确度,且能够在吸盘出现裂纹或者变形时,更及时的发现问题,并停止机械臂的搬运工作,避免出现问题时继续搬运造成物料掉落的情况发生;
18、3、本技术提供的防护机构由于还设置对中调节组件对若干个扩张条的位置进行调节,使得防护绳围成的空间大小能够根据机械臂所搬运的板材的尺寸进行调节。
- 还没有人留言评论。精彩留言会获得点赞!