协作机器人运动方法、装置及存储介质与流程
本技术涉及工业自动化的领域,尤其涉及一种协作机器人运动方法、装置、及存储介质。
背景技术:
1、随着机器人技术的不断发展和工业自动化目标的不断推进,机械臂已经广泛应用于各行各业的生产线上,承担着越来越多样化、复杂化的加工任务。为扩展工业机器人工作空间,使得工业机器人的位置及姿态可达,通常将外部轴作为外设与机器人相连,这些额外的轴可以与机器人的自身关节轴相互配合,实现更复杂的运动和姿态控制。而常规的机器人运动一般是在移动tcp模式下运动,移动tcp模式是将工具安装于协作机器人末端法兰盘上,而后机器人沿着示教的点位或者导入的加工路径,对固定的工件进行加工操作,需要频繁调整姿态和位置。当加工设备体积较大时,机器人的自身运动空间可能无法容纳加工设备,从而无法夹持和操作,导致加工效率低下并且机器人有一个额定负载能力,即最大允许承载的重量,如果加工设备的质量超过了机械臂的额定负载限制,机械臂也将无法安全地夹持和操作加工设备。
2、而固定tcp模式,是相对于移动tcp的另一种模式,即协作机器人末端带着工件,去接触固定的工具进行加工,但目前应用中往往使用单独运行的daemon程序进行固定tcp的规划与处理,存在代码重复量大、后期维护难、稳定性不高等问题,并且不适用于引入外部轴的运动状态。
3、因此,提供一种能够更加智能化、可靠性更高的协作机器人的运动控制方法,从而使机器人的应用更加便捷和高效,成为一个亟待解决的问题。
技术实现思路
1、本技术提供一种协作机器人运动方法、装置及存储介质,在不影响原有机器人运动规划架构的前提下,通过引入若干转换模块,满足固定tcp的运动需求。
2、根据本技术的第一方面,提供一种协作机器人运动方法,应用于机器人法兰盘携带工件接触固定工具的场景,其特征在于,包括:
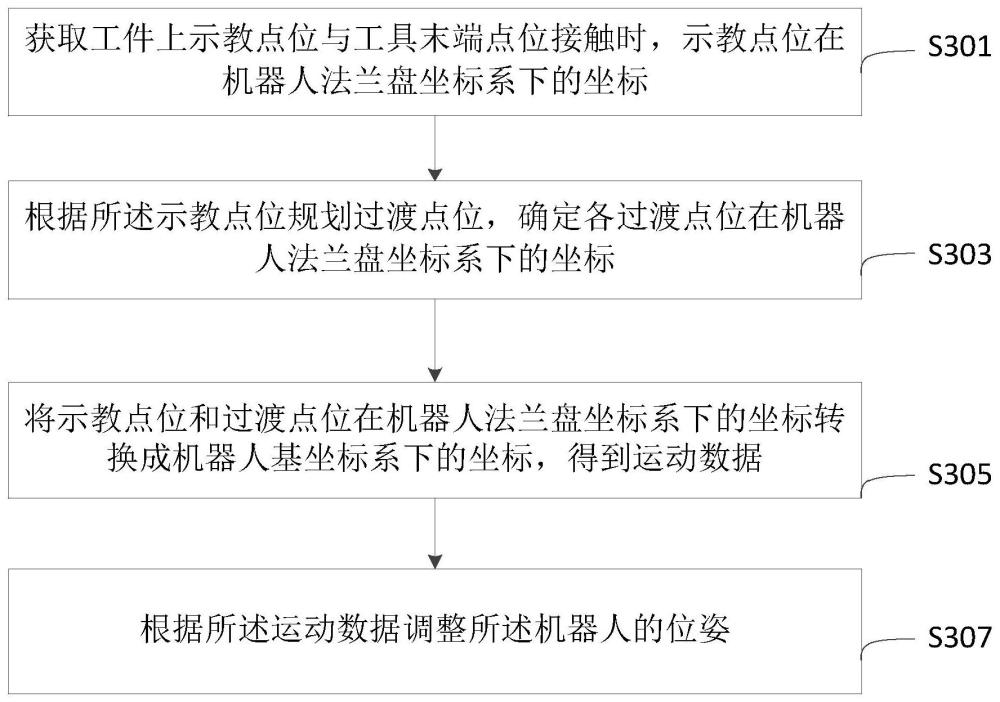
3、获取工件上示教点位与工具末端点位接触时,示教点位在机器人法兰盘坐标系下的坐标;
4、根据所述示教点位规划过渡点位,确定各过渡点位在机器人法兰盘坐标系下的坐标;
5、将示教点位和过渡点位在机器人法兰盘坐标系下的坐标转换成机器人基坐标系下的坐标,得到运动数据;
6、根据所述运动数据调整所述机器人的位姿。
7、可选的,所述获取工件上示教点位与工具末端点位接触时,示教点位在机器人法兰盘坐标系下的坐标,包括:
8、获取工具末端点位在机器人基座标系下的坐标;
9、获取工件上每个示教点位与工具末端点位接触时,法兰盘在机器人基座标系下的坐标;
10、根据所述工具末端点位在机器人基座标系下的坐标和法兰盘在机器人基座标系下的坐标,确定所述示教点位在机器人法兰盘坐标系下的坐标。
11、可选的,所述根据所述示教点位规划过渡点位,确定各过渡点位在机器人法兰盘坐标系下的坐标,包括:
12、根据预设的运动规划规则对各示教点位之间的运动路径进行规划,确定运动路径经过的过渡点位;
13、对各示教点位在机器人法兰盘坐标系下的坐标进行插补运算,获得各过渡点位在机器人法兰盘坐标系下的坐标。
14、可选的,所述对各示教点位在机器人法兰盘坐标系下的坐标进行插补运算,获得各过渡点位在机器人法兰盘坐标系下的坐标,包括:
15、对于每个过渡点位,确定该过渡点位的前一点位在机器人法兰盘坐标系下的坐标,所述前一点位为过渡点位或者示教点位;
16、获取插补增量;
17、将插补增量转换为末端法兰盘的增量;
18、基于末端法兰盘的增量和前一点位在机器人法兰盘坐标系下的坐标,确定过渡点位在机器人法兰盘坐标系下的坐标。
19、可选的,当协作机器人中未引入外部轴时,所述将示教点位和过渡点位在机器人法兰盘坐标系下的坐标转换成机器人基坐标系下的坐标,得到运动数据,包括:
20、计算工具末端点位在机器人基坐标系下的坐标和工具末端点位在机器人法兰盘坐标系下的坐标之间的转换数据;
21、根据所述转换数据,将所述示教点位和过渡点位在机器人法兰盘坐标系转换成机器人基坐标系下的坐标。
22、可选的,当协作机器人中引入外部轴时,所述将示教点位和过渡点位在机器人法兰盘坐标系下的坐标转换成机器人基坐标系下的坐标,得到运动数据,包括:
23、计算工具末端点位在机器人基坐标系下的坐标和工具末端点位在机器人法兰盘坐标系下的坐标之间的转换数据;
24、示教出外部轴坐标系与机器人基坐标系之间的关系,确定外部轴在基坐标系下的运动方向;
25、将所述转换数据沿着外部轴运行方向改变,将所述示教点位和过渡点位在机器人法兰盘坐标系转换成配合外部轴运动状态下机器人基坐标系下的坐标。
26、本公开的第二方面提供一种协作机器人运动装置,应用于机器人法兰盘携带工件接触固定工具的场景,包括:
27、点位转换模块,用于获取工件上示教点位与工具末端点位接触时,示教点位在机器人法兰盘坐标系下的坐标;
28、规划模块,用于根据所述示教点位规划过渡点位,确定各过渡点位在机器人法兰盘坐标系下的坐标;
29、位姿转换模块,用于将示教点位和过渡点位在机器人法兰盘坐标系下的坐标转换成机器人基坐标系下的坐标,得到运动数据;
30、位姿调整模块,用于根据所述运动数据调整所述机器人的位姿。
31、可选的,所述点位转换模块包括:
32、第一示教单元,用于获取工具末端点位在机器人基座标系下的坐标;
33、第二示教单元,用于获取工件上每个示教点位与工具末端点位接触时,法兰盘在机器人基座标系下的坐标;
34、点位转换单元,用于根据所述工具末端点位在机器人基座标系下的坐标和法兰盘在机器人基座标系下的坐标,确定所述示教点位在机器人法兰盘坐标系下的坐标。
35、可选的,所述规划模块包括:
36、规划单元,用于根据预设的运动规划规则对各示教点位之间的运动路径进行规划,确定运动路径经过的过渡点位;
37、插补单元,用于对各示教点位在机器人法兰盘坐标系下的坐标进行插补运算,获得各过渡点位在机器人法兰盘坐标系下的坐标;
38、所述位姿转换模块包括:
39、转换数据确定单元,用于计算工具末端点位在机器人基坐标系下的坐标和工具末端点位在机器人法兰盘坐标系下的坐标之间的转换数据;
40、坐标转换单元,用于根据所述转换数据,将所述示教点位和过渡点位在机器人法兰盘坐标系转换成机器人基坐标系下的坐标。
41、本公开的第三方面提供一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述第一方面所述的方法的步骤。
42、本技术的实施例提供的技术方案至少带来以下有益效果:
43、在机器人法兰盘携带工件接触固定工具的场景下,通过获取工件上示教点位在机器人法兰盘坐标系下的坐标,以此为基础规划出过渡点位,然后将示教点位和过渡点位在机器人法兰盘坐标系下的坐标转换成机器人基坐标系下的坐标,得到运动数据,进而基于运动数据控制机器人运动。本方法可与原有机器人运动的规划架构(即移动tcp模式)融合,在原有规划架构上添加数据转换功能,即可满足固定tcp的运动需求。该方式不影响原有机器人使用逻辑,简单高效,提高了功能的易用性、可靠性。此外,也实现了机器人与外部轴的协作工作,可以完成更加复杂的操作任务,具有较高的适用性和可扩展性
44、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!