一种基于折纸结构的混合驱动柔性机械臂
本发明属于软体机器人,具体涉及一种混合驱动柔性机械臂。
背景技术:
1、现有的柔性机械臂大多采用单一的驱动方式,例如气驱动、形状记忆合金以及绳驱动方式。但是单一的驱动方式存在一定的局限性,例如气驱动可以使机械臂结构设计紧凑,但是对气密性和控制精度具有高要求;形状记忆合金可以实现快速收缩变形,但是需要较长时间进行冷却;绳驱动具备较大驱动力,但是需要额外的电机和装置来实现牵引绳的拉伸和收缩。因此,单一的驱动器限制了柔性机械臂的作动效率。其次,大部分柔性机械臂的驱动器采用的是集中布置方式,这也限制了柔性机械臂的自由度和整体变形能力。最后,现有的柔性机械臂一般采用硅胶或复合材料制备,制作工艺复杂、质量较重,这使得机械臂的可达工作空间受到了限制。
2、为了进一步提升柔性机械臂的空间可达性和变形能力,同时实现其轻量化和制备过程简化,我们设计了该基于折纸结构的模块化混合驱动机械臂。
技术实现思路
1、本发明的目的在于提供一种空间构型丰富、运动能力出众的混合驱动柔性机械臂。
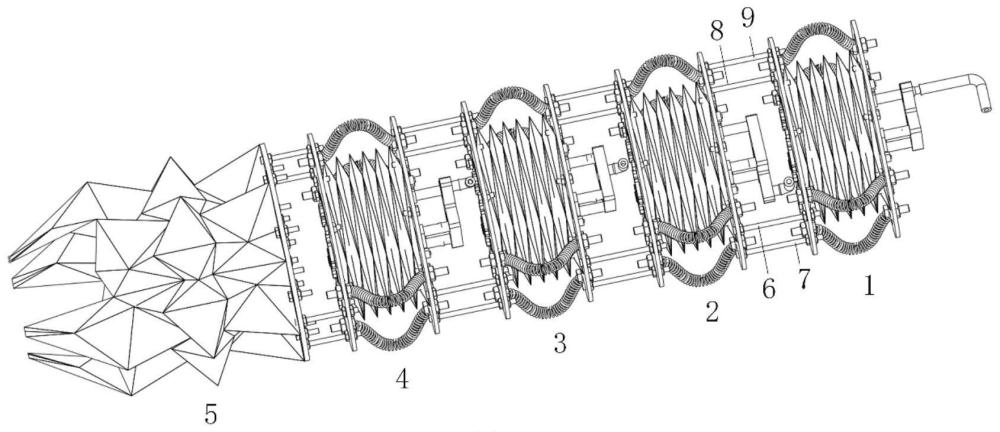
2、本发明设计的混合驱动柔性机械臂,采用模块化组合结构,包括抓手模块和若干个体节模块;每个模块均具有折纸结构;若干个体节模块串联连接;每一个体节模块具备4个方向的弯曲和轴向伸长的变形能力;抓手模块位于串联连接的体节模块的末端,具备抓取不同形状、不同软硬物体的能力;因此机械臂具备出色的空间可达性,可实现丰富的空间构型。其中:
3、体节模块中,每一个体节模块由yoshimura折纸结构、气动模组、pcb电路板、形状记忆合金弹簧组成;其中:
4、所述pcb电路板分为上、下两块;
5、所述气动模组至少有一组,例为一组、两组、三组、四组等,多组气动模的两端分别固定连接于两块pcb电路板上,多组气动模在空间上均匀布局于两块pcb电路板之间;每个气动模包含一个气动肌肉,通过同一气路进行控制,并且由外部气泵进行供气;
6、所述yoshimura折纸结构,其两端固定连接于两块pcb电路板上,空间上包围在多组气动模的外面;
7、所述形状记忆合金弹簧至少有四个,例为如四个、五个、六个等,多个形状记忆合金弹簧的两端分别固定连接于两块pcb电路板上,多个形状记忆合金弹簧在空间上均匀布局与两块pcb电路板之间,并且位于yoshimura折纸结构的外侧;通过电路控制电流的开与关,进而控制形状记忆合金弹簧的加热收缩过程;通过对气动肌肉进行充气,可实现体节的伸长;加热相邻两根形状记忆合金弹簧,同时对气动肌肉进行充气,可实现体节的单侧弯曲。
8、所述抓取模块,由waterbomb折纸结构、滑块、滑轨、牵引绳、形状记忆合金弹簧和pcb电路板构成;其中:
9、所述滑轨为圆柱体,其一端固定于pcb电路板的中心位置;滑块为一圆形块,其中心部位开有与圆柱体滑轨直径匹配的圆孔,套在圆柱体滑轨上,可上下滑动;
10、所述形状记忆合金弹簧至少为两根,例如为两根、三根、四根等,多根形状记忆合金弹簧的两端分别固定连接于pcb电路板与滑块上,多根形状记忆合金弹簧在空间上均匀布局在pcb电路板与滑块之间;通过电路控制电流的开与关,进而控制形状记忆合金弹簧的加热收缩过程;
11、所述waterbomb折纸结构包围在形状记忆合金弹簧、滑块、滑轨组合件外面,waterbomb折纸的前端与pcb电路板固定连接;牵引绳至少有两根牵引绳,例如为两根、三根、四根等,牵引绳的一端固定连接于滑块的另一侧面,另一端连接于waterbomb折纸前端的抓手手指上;
12、其动作过程为:将某相邻两个形状记忆合金短弹簧通电加热发生收缩变形,缩短滑块与pcb电路板之间距离,使滑块沿滑轨向底部滑动;同时,多根牵引绳在滑块的牵引下,使折纸抓手前端向内侧弯曲,抓手模块将表现出抓取状态。当两根形状记忆短弹簧停止通电加热,抓手模块将逐渐恢复到初始张开状态。
13、所述体节模块中:
14、进一步的,所述气动肌肉由气囊、t型封口、扎带和pu气管组成;气囊外部包裹有编织袋,在充气后主要产生轴向变形;气囊的一端由t型封口密封,并由扎带与上部pcb电路板过固定;气囊的一端另一端pu气管固定连接,多个pu气管连接至一个汇流盘上,汇流盘的另一侧连接总供气管,用于给气囊供气。
15、进一步的,两块pcb的挖孔几何结构相同。中心处的圆孔可供气管穿过模块内部。圆孔周围的多给安装槽,用于固定气动肌肉。具体地,气动肌肉末端的t型封口可横放进入安装槽,而后旋转90度与pcb板进行固定。气动肌肉进气端为锁紧扎带,扎带锁扣与电路板搭,而后通过另一根横向扎带固定。每一个模块上的多个气动肌肉都通过该方式与pcb板进行固定。气动肌肉的驱动气压范围为0.125mpa至0.225mpa。
16、进一步的,每一块pcb板上同时设计有形状记忆合金弹簧安装孔,形状记忆合金弹簧各自通过螺栓与pcb板进行连接。
17、进一步的,yoshimura折纸结构两端均通过螺栓与pcb板进行连接,为了保证折纸结构在具备大变形能力的同时具备一定的承载力,这里选择厚度为0.125mm的聚对苯二甲酸乙二醇酯(pet)薄膜,而后用激光切割机进行加工制作。
18、进一步的,模块pcb板上同时也包括主控芯片、远程信号传输芯片、电路开关控制芯片、惯性传感器以及相关的配套电路。
19、进一步的,每一块pcb板的靠近外边缘部分设计有四个圆形安装孔,可以用于体节模块之间、体节模块与抓取模块之间的连接。
20、进一步的,两块pcb板的尺寸应该满足弯曲至最大角度前不存在干涉的原则。
21、所述抓取模块中:
22、进一步的,滑轨通过螺栓与抓取模块的pcb板进行连接。
23、进一步的,waterbomb折纸抓手结构通过螺栓与pcb进行连接,为了保证折纸抓手结构具备一定的抓取承载力,这里选择厚度为0.125mm的聚对苯二甲酸乙二醇酯(pet)薄膜,而后用激光切割机进行加工制作。
24、进一步的,牵引绳均一端固定在折纸抓手内侧,另一端通过螺栓固定在圆柱形滑块上。圆柱形滑块中心有圆孔,可沿着滑轨进行滑动。
25、进一步的,形状记忆合金短弹簧一端通过螺栓固定在滑块的底部,另一端通过螺栓固定在抓手模块pcb板上。
26、与现有技术相比,本发明所达到的有益效果
27、(1)本发明设计的机械臂实现了加工过程的简单化、整体的轻量化:相较于传统的柔性机械臂一般采用硅胶制作主体,本设计主体的折纸结构可通过激光切割技术进行快速加工,制作非常便捷;同时,折纸结构由于是将薄膜材料通过折叠形成的三维结构,因此整体质量非常轻;此外,本发明所设计的折纸机械臂基于模块化思想,便于进行结构和功能的调整;
28、通过电路控制电流的开与关,进而控制形状记忆合金弹簧的加热收缩过程;
29、(2)本发明的机械臂具备出色的运动能力:轴向变形又气动肌肉充气伸长实现,具备较大的抗弯刚度以及伸长率;弯曲变形通过形状记忆合金弹簧加热收缩和气动肌肉充气同时作动实现,具备较大的弯曲角度;此外,气动肌肉和形状记忆合金均可以快速作动,因此机械臂整体可以快速进行构型切换;
30、(3)本发明运用广泛:该折纸机械臂末端具备较大的工作空间,同时机械臂整体可以实现丰富的空间构型;机械臂末端的抓手则具备抓取不同大小、不同形状以及不同软硬的物体。
- 还没有人留言评论。精彩留言会获得点赞!