一种机器人夹具抓手及其机器人
本发明涉及机器人夹具抓手,具体为一种机器人夹具抓手及其机器人。
背景技术:
1、公告号为cn214692082u的中国实用新型专利公开了机器人用伺服v型夹具,包括支架横梁,所述支架横梁的底部两侧均固定连接有连接支架,两个所述连接支架之间靠近下方位置设置有丝杠,所述支架横梁的下方两侧位置均设置有移动夹板,两个所述移动夹板上均固定连接有滚珠螺母,两个所述滚珠螺母与两组丝杠相对应螺纹连接,两个所述连接支架之间且位于丝杠上方位置固定连接有一组并排两根的固定导轨,且其中一个连接支架的顶部固定连接有伺服电机,所述伺服电机的输出端上套接有主动链轮。本实用新型中,通过设置的v型夹块结构并配合连接卡槽与限位柱的设置,第二v型块可在夹持过程中与第一v型块交错卡紧,使整个夹具结构能够夹持更小直径的工件,使结构的夹持范围更广。
2、上述专利所提供的技术方案中,虽然实现了使夹具夹持范围更广的目的,但在实际使用时仍存在以下的不足之处:
3、该方案中的v型夹块的角度无法进行调节,在实际夹紧工件时,v型夹块与工件之间会形成两个夹紧点,或者说两条夹紧线(即工件与v型夹块两个内表面之间的接触位置),这两个夹紧点之间的距离无法调节,当对于一些较大的工件来说,由于两个夹紧点之间的距离较小,v型夹块作用在工件表面的夹持面积小,因此在夹紧工件之后就会存在工件稳定性差的问题,例如工件位于v型夹块两侧的重量相差较大,当整个夹具移动时,工件就很容易出现晃动,存在工件掉落以及工件磨损的风险,安全性差。
技术实现思路
1、本发明的目的在于提供一种机器人夹具抓手及其机器人,以解决上述背景技术中提出的问题。
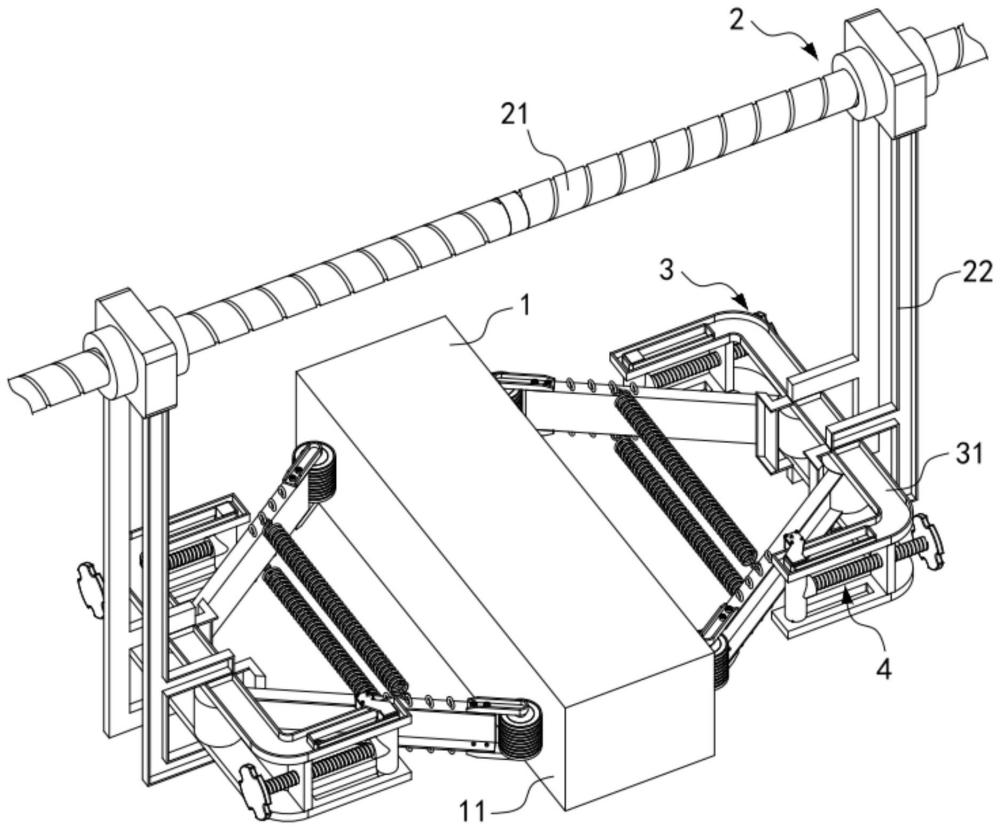
2、为实现上述目的,本发明提供如下技术方案:一种机器人夹具抓手,用于抓夹设有被夹面的被夹物,所述机器人夹具抓手包括驱动部和对称设置的两个夹紧部;
3、所述驱动部驱动两个夹紧部同步靠近或远离;
4、所述夹紧部包括固定座、水平转动连接在固定座上并呈v形布置的两个夹臂以及钩连在两个夹臂之间的拉簧,所述拉簧与被夹面相平行;
5、所述固定座上设置有两个限位柱,用于限定两个夹臂的最大开合角度;
6、所述限位柱与被夹面之间的距离可通过调节部调节,且其中一个限位柱上安装有限位开关,当所述夹臂与所述其中一个限位柱接触时,限位开关被触发,使驱动部关闭。
7、优选的,所述夹臂具有夹紧端和连接端,所述夹紧端与固定座转动连接,所述连接端处设置有单向轮,两个所述单向轮均在夹紧部夹紧被夹物时旋转。
8、优选的,所述调节部包括与固定座螺纹连接并与被夹面垂直的螺杆,所述螺杆的一端与限位柱转动连接。
9、优选的,所述限位开关的按钮竖向设置,所述按钮的底端边缘位置形成有锥形面,所述夹臂的上表面位于锥形面的底端与顶端之间。
10、优选的,所述调节部还包括固定板,所述螺杆与固定板螺纹连接,且固定板与固定座固定连接。
11、优选的,所述调节部还包括开设在固定座上的滑槽,所述限位柱上固定有与滑槽滑动连接的滑块。
12、优选的,所述单向轮包括竖向设置的中间轴、通过单向轴承转动连接在中间轴上的轮体以及固定套设在轮体外周的橡胶套,所述橡胶套的外周面开设有若干环形槽,所述中间轴通过安装架与夹臂固定连接。
13、优选的,所述夹紧部还包括与固定座固定连接的两个限位座,两个所述夹臂通过拉簧分别压紧在两个限位座上,限定两个夹臂的最小开合角度。
14、优选的,所述驱动部包括水平设置的双向丝杆以及螺纹连接在双向丝杆两段螺纹上的连接臂,两个所述连接臂分别与两个固定座固定连接。
15、一种机器人,该机器人包括上述的机器人夹具抓手。
16、与现有技术相比,本发明的有益效果是:
17、本发明通过设置的调节部来调节限位柱与被夹面之间的距离,使工作人员可以根据被夹物的实际情况调整限位柱的位置,而限位开关又安装在限位柱上,因此也就实现了对限位开关位置的调整,又由于夹臂在张开过程中与限位柱接触后会触发限位开关,而限位开关被触发后会使得驱动部停止驱动两个夹紧部向中间靠拢,此时夹臂对被夹物的夹持力达到最大,也即,工作人员可以根据被夹物的实际情况调节夹臂作用在被夹物上的夹紧力的大小,同时每个夹紧部上的两个夹紧端之间的距离也可以自适应的调整到最大,从而既可以防止被夹物被过大的夹紧力夹坏,实现了对被夹物的有效保护,也可以增大夹紧部的夹紧面积,提高了被夹物在移动过程中的稳定性,防止被夹物被划伤或掉落,提高了整个装置的安全性。
18、本发明中夹紧端对被夹物施加的夹紧力可以进行调节,因此当被夹物指代纸质包装箱和放置于该纸质包装箱内部的重物时,可以先计算想要夹持起该被夹物是所需要的最小夹紧力,然后将夹紧端对被夹物施加的夹紧力调整至等于或者略大于该最小夹紧力的状态,然后进行夹紧作业,若可以正常夹紧该被夹物并搬移,则表明此时该纸质包装箱内部的重物并没有超重,反之,若无法夹紧该被夹物并搬移,则表明此时该纸质包装箱内部的重物出现超重情况,因此就需要更换纸质包装箱或者减轻重物的重量,也即,本发明中的夹具还具有判断的作用,避免出现纸质包装箱内重物过重的情况,进一步提高了夹具的使用安全性。
技术特征:
1.一种机器人夹具抓手,用于抓夹设有被夹面的被夹物,其特征在于,所述夹具抓手包括驱动部和对称设置的两个夹紧部;
2.根据权利要求1所述的一种机器人夹具抓手,其特征在于:所述夹臂具有夹紧端和连接端,所述夹紧端与固定座转动连接,所述连接端处设置有单向轮,两个所述单向轮均在夹紧部夹紧被夹物时旋转。
3.根据权利要求1所述的一种机器人夹具抓手,其特征在于:所述调节部包括与固定座螺纹连接并与被夹面垂直的螺杆,所述螺杆的一端与限位柱转动连接。
4.根据权利要求1所述的一种机器人夹具抓手,其特征在于:所述限位开关的按钮竖向设置,所述按钮的底端边缘位置形成有锥形面,所述夹臂的上表面位于锥形面的底端与顶端之间。
5.根据权利要求3所述的一种机器人夹具抓手,其特征在于:所述调节部还包括固定板,所述螺杆与固定板螺纹连接,且固定板与固定座固定连接。
6.根据权利要求1所述的一种机器人夹具抓手,其特征在于:所述调节部还包括开设在固定座上的滑槽,所述限位柱上固定有与滑槽滑动连接的滑块。
7.根据权利要求2所述的一种机器人夹具抓手,其特征在于:所述单向轮包括竖向设置的中间轴、通过单向轴承转动连接在中间轴上的轮体以及固定套设在轮体外周的橡胶套,所述橡胶套的外周面开设有若干环形槽,所述中间轴通过安装架与夹臂固定连接。
8.根据权利要求1所述的一种机器人夹具抓手,其特征在于:所述夹紧部还包括与固定座固定连接的两个限位座,两个所述夹臂通过拉簧分别压紧在两个限位座上,限定两个夹臂的最小开合角度。
9.根据权利要求1所述的一种机器人夹具抓手,其特征在于:所述驱动部包括水平设置的双向丝杆以及螺纹连接在双向丝杆两段螺纹上的连接臂,两个所述连接臂分别与两个固定座固定连接。
10.一种机器人,其特征在于,该机器人包括权利要求1-9任意一项所述的机器人夹具抓手。
技术总结
本发明涉及机器人夹具抓手技术领域,尤其为一种机器人夹具抓手及其机器人,用于抓夹设有被夹面的被夹物,所述机器人夹具抓手包括驱动部和对称设置的两个夹紧部;所述被夹物具有被夹面;所述驱动部驱动两个夹紧部同步靠近或远离;所述夹紧部包括固定座、水平转动连接在固定座上并呈V形布置的两个夹臂以及钩连在两个夹臂之间的拉簧,所述拉簧与被夹面相平行;所述固定座上设置有两个限位柱;限位柱与被夹面之间的距离可通过调节部调节,且其中一个限位柱上安装有限位开关,当夹臂与所述其中一个限位柱接触时,限位开关被触发,使驱动部关闭。本发明提高了被夹物在移动过程中的稳定性,防止被夹物被划伤或掉落,提高了整个装置的安全性。
技术研发人员:章猛华,周照航,范孝川,吕亚男,柏余杰
受保护的技术使用者:苏州工业职业技术学院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!