一种轨道式巡检机器人、运动定位控制系统及方法与流程
本发明属于变电站轨道式巡检机器人,尤其涉及一种轨道式巡检机器人、运动定位控制系统及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、为保障电网的稳定可靠运行,需要对变电站设备的运行状态进行日常巡检,变电站智能巡检机器人目前已经成为了变电站设备巡检的重要手段,变电站智能巡检机器人,能够代替人工完成变电站设备的红外测温、设备状态监测识别等工作,推进了变电站无人值守的进程。目前,在保护室等室内环境中,一般使用轨道式巡检机器人对室内设备进行巡视检查。
3、变电站轨道式巡检机器人在执行巡检任务时,需要将检测设备绑定到巡检路径上最适合观测的水平及升降停靠点上,机器人需要在不同的水平、升降停靠点之间移动,以实现对所有需检测设备的巡检工作。但由于现场环境复杂,有时会面临转弯,爬坡等情况,如果驱动方案不可靠,会造成机器人转弯卡滞,爬坡打滑等现象。同时,在驱动方案可靠的前提下,还要有稳定的运动定位控制系统,保证机器人准确无误的运动到相应的停靠点,进行巡检任务,否则会造成漏检情况,降低工作效率,且极大地耗费了人力成本。
技术实现思路
1、为了解决上述背景技术中存在的至少一项技术问题,本发明提供一种轨道式巡检机器人、运动定位控制系统及方法,其依托技术成熟的轨道式巡检机器人系统,机器人采用底部驱动传动方案,在不同轨道段,包括直线段,转弯段,实现机器人稳定运行。同时,在传动方案可靠的前提下,机器人定位控制系统采用rfid标签定位方式与电机定位相结合的方式实现机器人可靠定位,同时将定位信息作用于驱动组件,稳定可靠的到达目标点位,有效提升巡检效率。
2、为了实现上述目的,本发明采用如下技术方案:
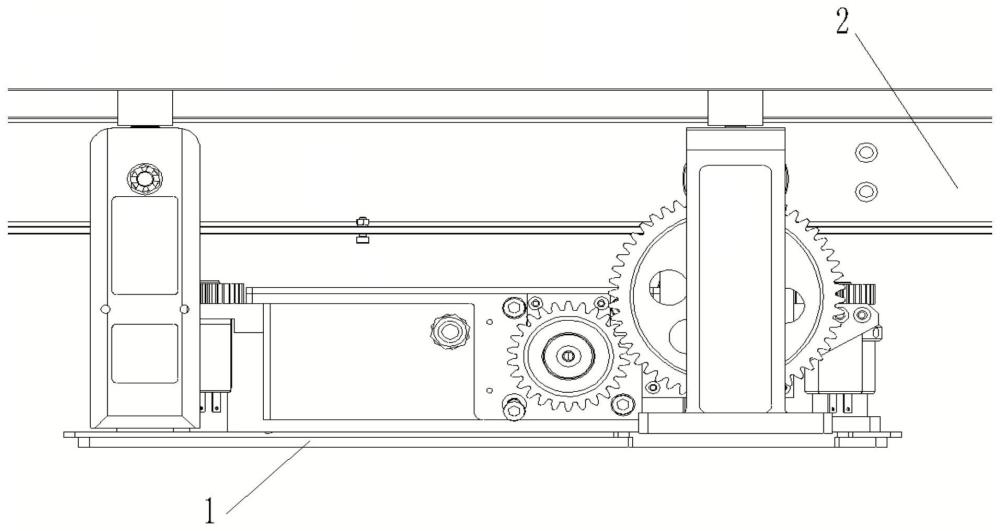
3、本发明的第一方面提供一种轨道式巡检机器人,包括底座和固定于底座上的驱动组件,所述驱动组件包括驱动架和驱动舱,所述驱动舱内固定第一电机,所述第一电机上安装主动齿轮和从动齿轮,所述主动齿轮和从动齿轮啮合,所述从动齿轮转动连接驱动轮,所述驱动架上设置夹持结构,所述驱动轮和夹持结构抱紧轨道底板;
4、所述驱动舱两侧固定第二电机、第三电机和弹簧调节套筒,所述第二电机和第三电机上端连接主动调节齿轮,弹簧调节套筒上端连接从动调节齿轮,所述主动调节齿轮和从动调节齿轮啮合,通过带动弹簧调节套筒旋转,调节驱动轮与轨道的压紧力以调节机器人的驱动力。
5、进一步地,所述底座上还固定转向架,所述转向架底部通过推力球轴承底座连接;
6、所述转向架两侧分别固定第一承重轮和防倾轮,所述转向架的顶端设置第一导向轮,所述防倾轮和第一承重轮抱紧轨道底板的一端,所述第一导向轮与轨道的该端的侧面贴合;
7、所述驱动架两侧分别固定第二承重轮,所述驱动架的顶端设置第二导向轮,所述第二承重轮和驱动轮抱紧轨道底板的另一端,所述第二导向轮与轨道的该端的侧面贴合。
8、进一步地,所述驱动架前端设置t型槽,所述t型槽内设置连接弹簧,通过连接弹簧连接滑块的一端,滑块和t型槽滑动配合,所述滑块的另一端固定挡板,所述滑块的顶端固定第一导向轮。
9、进一步地,所述驱动组件包括驱动底板和传动轴,所述驱动底板上固定滑块,所述滑块滑动装入滑槽内,所述从动齿轮和驱动轮通过键连接与传动轴连接,所述传动轴两端安装轴承,所述轴承通过轴承端盖固定至滑槽上。
10、进一步地,所述弹簧调节套筒包括第一弹簧调节套筒和第二弹簧调节套筒,所述滑槽上固定弹簧压板,所述弹簧压板和第一弹簧调节套筒连接,所述驱动底板上设置第一弹簧固定套筒,所述第一弹簧固定套筒和第一弹簧调节套筒内设置第一弹簧;
11、所述底座上固定第二弹簧固定套筒,所述第二弹簧固定套筒和第二弹簧调节套筒内设置第二弹簧。
12、进一步地,所述驱动舱上方设置舱盖,所述驱动舱上镶嵌密封圈,所述驱动舱和舱盖之间通过密封圈压紧。
13、本发明的第二方面提供一种轨道式巡检机器人运动定位控制系统,应用第一方面所述的一种轨道式巡检机器人,包括设置于机器人本体上的rfid读卡器和处理器,所述rfid读卡器用于读取预置在轨道上的标签信息;
14、所述处理器用于接收读取到的标签信息和在运行过程中驱动电机的脉冲数,将驱动电机的脉冲数转化为对应电机脉冲的位置信息;
15、将标签位置信息和预设目标位置信息的差值、电机脉冲的位置信息与预设目标位置信息的差值和设定的定位精度比较,根据不同的比较结果进行相应的处理;
16、判断是否到达目标停靠点且处于停止状态,如果是,结束运动定位控制。
17、本发明的第三方面提供一种轨道式巡检机器人运动定位控制方法,包括如下步骤:
18、读取预置在轨道上的标签信息;
19、接收读取到的标签信息和在运行过程中驱动电机的脉冲数,将驱动电机的脉冲数转化为对应电机脉冲的位置信息;
20、将标签位置信息和预设目标位置信息的差值、电机脉冲的位置信息与预设目标位置信息的差值和设定的定位精度比较,根据不同的比较结果进行相应的处理;
21、判断是否到达目标停靠点且处于停止状态,如果是,结束运动定位控制。
22、与现有技术相比,本发明的有益效果是:
23、1、本发明创新性地提出了一种变电站轨道式巡检机器人,机器人采用底部驱动传动方案,在不同轨道段,采用不用的传动方案,直线段由压缩弹簧将驱动轮与轨道底板贴紧,由驱动轮与轨道底板间的摩擦力提供驱动力;在轨道转弯段,转向架采用弹簧抱紧导向轮系、驱动架采用无弹性抱紧的导向轮系,有效解决机器人卡滞问题;在轨道上下坡段,其自动增压机构可实现小角度爬坡时依靠弹簧压力达到增大摩擦力的效果实现上下坡,解决机器人转弯过程中的卡滞现象,避免了上下坡过程中的打滑现象,提高设备运行稳定性。
24、2、本发明创新性地提出了基于变电站轨道式巡检机器人的运动定位控制方法,在传动方案可靠的前提下,通过采用rfid标签定位与电机定位双重定位方式实现机器人可靠定位,同时将定位信息作用于驱动组件,确保机器人顺利到达目标位置,同时运维人员可根据具体情况及时更换读卡器或者标签及对驱动电机进行检修,避免造成漏检情况,有效提升巡检效率。
25、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种轨道式巡检机器人,其特征在于,包括底座和固定于底座上的驱动组件,所述驱动组件包括驱动架和驱动舱,所述驱动舱内固定第一电机,所述第一电机上安装主动齿轮和从动齿轮,所述主动齿轮和从动齿轮啮合,所述从动齿轮转动连接驱动轮,所述驱动架上设置夹持结构,所述驱动轮和夹持结构抱紧轨道底板;
2.如权利要求1所述的一种轨道式巡检机器人,其特征在于,所述底座上还固定转向架,所述转向架底部通过推力球轴承底座连接;
3.如权利要求2所述的一种轨道式巡检机器人,其特征在于,所述驱动架前端设置t型槽,所述t型槽内设置连接弹簧,通过连接弹簧连接滑块的一端,滑块和t型槽滑动配合,所述滑块的另一端固定挡板,所述滑块的顶端固定第一导向轮。
4.如权利要求1所述的一种轨道式巡检机器人,其特征在于,所述驱动组件包括驱动底板和传动轴,所述驱动底板上固定滑块,所述滑块滑动装入滑槽内,所述从动齿轮和驱动轮通过键连接与传动轴连接,所述传动轴两端安装轴承,所述轴承通过轴承端盖固定至滑槽上。
5.如权利要求4所述的一种轨道式巡检机器人,其特征在于,所述弹簧调节套筒包括第一弹簧调节套筒和第二弹簧调节套筒,所述滑槽上固定弹簧压板,所述弹簧压板和第一弹簧调节套筒连接,所述驱动底板上设置第一弹簧固定套筒,所述第一弹簧固定套筒和第一弹簧调节套筒内设置第一弹簧;
6.如权利要求1所述的一种轨道式巡检机器人,其特征在于,所述驱动舱上方设置舱盖,所述驱动舱上镶嵌密封圈,所述驱动舱和舱盖之间通过密封圈压紧。
7.一种轨道式巡检机器人运动定位控制系统,其特征在于,应用权利要求1-6任一项所述的一种轨道式巡检机器人,包括设置于机器人本体上的rfid读卡器和控制器,所述rfid读卡器用于读取预置在轨道上的标签信息;
8.如权利要求7所述的一种轨道式巡检机器人运动定位控制系统,其特征在于,所述控制器用于发送运动控制指令;
9.一种轨道式巡检机器人运动定位控制方法,包括如下步骤:
10.如权利要求9所述的一种轨道式巡检机器人运动定位控制方法,其特征在于,所述将标签位置信息和预设目标位置信息的差值α、电机脉冲的位置信息与预设目标位置信息的差值β和设定的定位精度γ比较,根据不同的比较结果进行相应的处理,具体包括:
技术总结
本发明属于变电站轨道式巡检机器人技术领域,提供了一种轨道式巡检机器人、运动定位控制系统及方法,其技术方案为:依托轨道式巡检机器人系统,机器人采用底部驱动传动方案,在不同轨道段,包括直线段,转弯段,实现机器人稳定运行。同时,在传动方案可靠的前提下,机器人定位控制系统采用RFID标签定位方式与电机定位相结合的方式实现机器人可靠定位,同时将定位信息作用于驱动组件,稳定可靠的到达目标点位,有效提升巡检效率。
技术研发人员:张卫敏,苑锋,张永生,李德旺,周仲强,张聪聪,蒋克强,王斌,王飞,李开广,裴淼,吕鹏,孙建路
受保护的技术使用者:国网智能科技股份有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!