一种灵活搭载轮式巡检机器人及方法与流程
本发明属于巡检机器领域,尤其涉及一种灵活搭载轮式巡检机器人及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、轮式巡检机器人能够实现自主前进、后退、转弯和爬坡等行为,可通过远程后台控制机器人运动速度,巡检动作。但是目前的轮式巡检机器人存在以下问题:
3、(1)机器人仅能完成可见光摄像机、红外热像仪的图像及视频资料的抓取任务,不具备灵活搭载能力,往往为了新增一个功能,需将机器人整体进行拆解才能加装,费事费力,走线凌乱。
4、(2)机器人充电系统设计过于简单,直接采用适配器直联充电座方式,机器人充电系统长期带电,严重降低使用寿命受限的情况存在。
5、(3)机器人在运行过程中减震性能较差,从而影响搭载仪器测量准确性。
6、(4)机器人在充电时可能存在静电,而静电未释放,从而对充电箱内的元件造成损伤,而且缺乏充电插头与充电插座之间的对接动作联动,降低了机器人充电动作的精准性。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种灵活搭载轮式巡检机器人及方法,其具有灵活搭载功能,且能够实现机器人的精准充电动作。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供了一种灵活搭载轮式巡检机器人。
4、一种灵活搭载轮式巡检机器人,包括:
5、驱动转向组件、灵活搭载组件、电源管理组件及控制组件;
6、所述控制组件与驱动转向组件、灵活搭载组件和电源管理组件采用分布式总线方式进行通讯;
7、所述驱动转向组件、灵活搭载组件和电源管理组件分别定时根据预设自检方式将各自的自检结果上送至控制组件;
8、所述控制组件被配置为根据接收的所有自检结果与预设故障数据库内的数据进行比对,查找出故障类型及其自恢复策略。
9、作为一种实施方式,当自检结果与预设故障数据库内的数据匹配失败时,控制组件将自检结果传送至上级控制中心,由上级控制中心分析故障类型及恢复策略。
10、作为一种实施方式,若恢复策略为自恢复策略,则上级控制中心将当前自检结果及其对应的故障类型与自恢复策略发送至预设故障数据库存储,以更新预设故障数据库。
11、作为一种实施方式,若恢复策略为非自恢复策略,则上级控制中心形成工单,以通知运维人员及时修复。
12、作为一种实施方式,所述驱动转向组件包括驱动机构、异形支臂、弹簧减震器、立支柱和主板;
13、所述立支柱固定在主板上,所述主板与驱动机构相连;
14、所述异形支臂一端与驱动结构相连,另一端与主板活动连接;
15、所述弹簧减震器的一端与异形支臂固定连接,所述弹簧减震器的另一端与立柱固定连接。
16、作为一种实施方式,所述弹簧减震器的一端通过第一快卸销与异形支臂固定连接,所述弹簧减震器的另一端通过第二快卸销与立柱固定连接。
17、作为一种实施方式,所述驱动转向组件包括驱动器、z形支架、减震器、连杆和机器人本体支架;
18、所述驱动器与z形支架固定连接;
19、所述减震器的一端与机器人本体支架铰接,另一端与z形支架铰接;
20、所述连杆布设在所述减震器的两侧;所述连杆的一端与z形支架铰接,另一端与机器人本体支架铰接。
21、作为一种实施方式,所述减震器的一端通过第一回转轴与机器人本体支架铰接,另一端通过第二回转轴与z形支架铰接。
22、作为一种实施方式,所述连杆的一端通过第一回转销与z形支架铰接,另一端通过第二回转销与机器人本体支架铰接。
23、作为一种实施方式,所述连杆共四根,分形成一个四连杆的多边形结构。
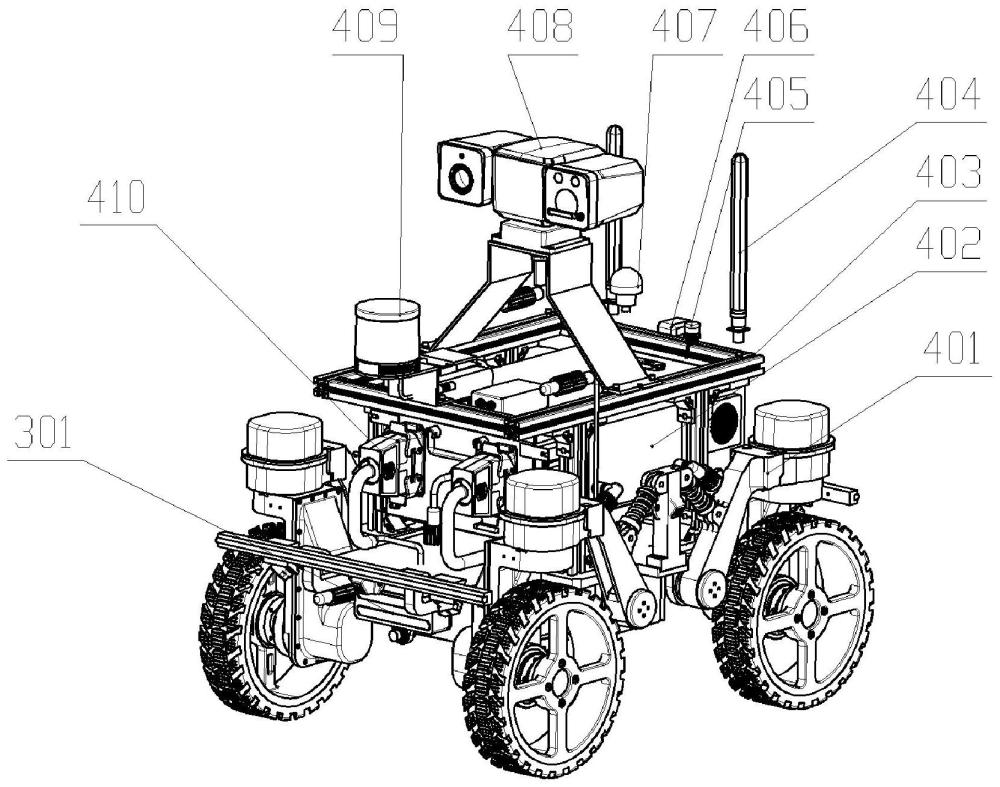
24、作为一种实施方式,所述灵活搭载组件包括云台组件和传感组件;所述云台组件中的视频采集元件用于采集机器人本体周围视频信息并传送至控制组件;所述传感组件用于感知机器人本体自身状态及其周围环境信息并传送至控制组件;所述控制组件用于根据其接收到的机器人本体自身状态、周围环境信息及周围视频信息,形成相应决策,以导航定位控制机器人。
25、作为一种实施方式,所述云台组件安装在支架上。
26、作为一种实施方式,,所述传感组件安装在支架上,所述传感组件包括激光器和姿态传感器,所述激光器用于采集机器人本体的周围信息,所述姿态传感器用于采集机器人姿态信息。
27、作为一种实施方式,所述控制组件用于通过多传感器数据融合定位技术,获取机器人运行状态信息,在巡检作业时,在非巡检路径提高机器人的运行速度;在靠近机器人巡检作业点,动态柔性降低速度;巡检过程结束后,再次提升运行速度来完成高速巡检动作。
28、作为一种实施方式,所述电源管理组件包括电源管理组件、电池组件及电池状态传感组件,所述电池状态传感组件用于感知电池组件的运行状态信息并传送至电源管理组件,所述电源管理组件用于根据电池组件的运行状态信息来控制电池组件的充放电过程。
29、作为一种实施方式,所述电池组安装在抽屉结构的壳体内。
30、作为一种实施方式,所述灵活搭载轮式巡检机器人的本体设置有机器人充电插座;所述机器人充电插座内设置有充电极片;所述机器人充电插座与充电装置相匹配;
31、所述充电装置包括充电箱、充电插头、移动极片和静电释放棒;
32、所述充电插头设置在充电箱内,所述移动极片通过导线与充电插头相连,所述导线外侧设置有第一弹簧;所述静电释放棒一端与充电插头相连,另一端伸出所述充电箱外,且所述静电释放棒外侧套设有第二弹簧;当在机器人充电时,所述静电释放棒用于与机器人充电插座接触,将机器人本体的静电释,以释放机器人本体的静电。
33、作为一种实施方式,所述充电箱底座还设置有多连杆可调高底座机构。
34、作为一种实施方式,所述多连杆可调高底座机构由平行四边形机构和正反调节旋钮组成;当正向调节旋钮时,平行四边形机构两斜边与地面夹角增大,平行四边形底边上高增加,充电箱被机构抬起;当反向调节旋钮时,平行四边形机构两斜边与地面夹角减小,平行四边形底边上高减小,充电箱被机构下降。
35、本发明的第二个方面提供了一种灵活搭载轮式巡检机器人的充电方法。
36、一种灵活搭载轮式巡检机器人的充电方法,其包括:
37、在机器人充电时,将静电释放棒与机器人充电插座接触,释放机器人本体的静电;
38、再通过第一弹簧伸出移动极片,使其与机器人充电插座的极片接触,完成充电动作。
39、本发明的有益效果是:
40、(1)本发明创新性提出了一种灵活搭载轮式巡检机器人,其利用灵活搭载组件为机器人提供搭载器件平台,通过机器人模块化,利用控制组件与驱动转向组件、灵活搭载组件和电源管理组件采用分布式总线方式进行通讯,解决了机器人搭载受限且线缆种类繁杂的问题,提高了机器人多种功能器件的灵活搭载能力及控制方案的简洁清晰性,实现了多业务场景的功能扩展。
41、(2)本发明创新性提出了机器人智能自检技术,通过定时将软硬件模块的自检结果上送至控制组件,并根据各模块的自检结果,综合给出故障诊断及自恢复策略,解决了机器人运行不稳定的问题,提高了机器人运维的时效性,保障了机器人稳定运行。
42、(3)本发明创新性设计了机器人一体化减震结构,减震结构为异性支臂形式,通过异形支臂与主车体之间形成三角定位关系,在机器人运动时候,随着地形的起伏,减震器完成伸缩动作,解决了机器人运行过程中振动影响搭载仪器测量准确性的问题,实现了机器人对地面一个较好的附着力。
43、(4)本发明创新性提出了机器人充电静电释放技术,采用测距传感器感测机器人充电插座与充电箱上的充电插头的距离,以实现机器人的充电插头与充电箱上充电插座之间的对接动作联动,提高了机器人充电动作的精准性。
44、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!