一种伸缩机构的制作方法
本发明涉及涉及服务机器人领域,尤其涉及直线驱动体系服务机器人的伸缩臂实现。
背景技术:
1、家庭服务机器人是一种在家居环境或类似环境中能够执行各种服务任务的机器人设备,目前已被列为重点发展领域之一,与此同时,机器人应用市场越来越广泛,家庭服务机器人大有作为。
2、目前多数研发团队将家庭服务机器人往拟人化方向发展,机器人采用旋转驱动方式形成类似人体关节运动轨迹,人型机器人受复杂关节设计、体积以及成本等限制,距离走向用户日常家居生活仍相距较远。
3、us20210170583a1提出一种在人类环境中执行客观任务的移动操作机器人,拟通过直线驱动方式构建xz轴直线运动体系,配合底部移动基座补足y轴移动能力,达到简单化、轻便化目的,有望抢先快速进入日常家居生活。
4、us20210170583a1的机器人在其伸缩臂的实现上,采用多个节段相对于彼此伸缩并在其中传送驱动链,驱动链通过多个相互连接的链节组成,满足伸出的刚性以及缩回能卷绕在一起,驱动链一端连接到多个节段的远端节段,远端节段位于伸缩结构的末端,从而对多个节段施加线性平移力达到伸缩目的。此伸缩机构受限于多链节相互连接结构,重量较大且结构复杂,在轻量化上并不具有优势。
5、cn 208595128u描述了一种绕线式多节电动采摘设备专用辅助伸缩机构,其绕线采用了闭合模式,即绕线的两端都与空心杆相连,同时,该专利仅使用1个绕线轮,技术实现缺乏可行性,此外线材自空心杆内部到外部延伸形成封闭,伸缩过程中对于绕线模组的使用安全性、耐久性均造成影响。
技术实现思路
1、本发明为改善现有技术的不足之处,而提供一种更轻量化的伸缩机构,伸缩机构的绕线模组的使用安全性、耐久性都有所提高。
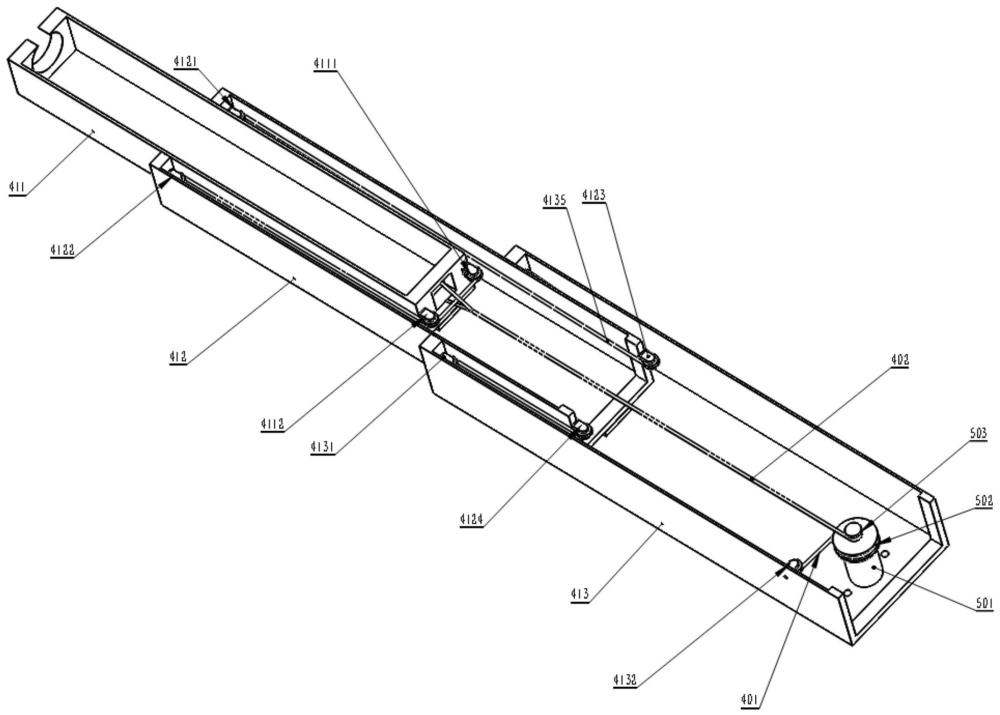
2、本发明的伸缩机构,可以应用于直线驱动体系服务机器人的伸缩臂的实现上,达到更轻便目的,也可以应用于如农业、工业等其他需要轻量化伸缩结构的场合。所述提供的伸缩机构,包括第一丝线、第二丝线、第一定滑轮、第一主动旋转部件、第二主动旋转部件、近端套管,以及以一个套一个的形式可滑动接合于近端套管内的至少一个远端套管;丝线能承受的拉力配置为至少大于10n;远端套管的朝向远端方向的端部为顶部,朝向近端方向的端部为底部,每个远端套管的顶部设置有第一限位部件用于限制其朝近端方向伸入相邻外侧套管的距离,每个远端套管的底部设置有第二限位部件用于限制其朝远端方向伸出相邻外侧套管的距离;第一丝线一端固定于近端套管的轴线一侧,第一定滑轮固定于近端套管轴线另一侧,第一丝线的另一端在管内从远端套管底部穿过并绕过第一定滑轮缠绕至第一主动旋转部件,第一定滑轮的位置配置为在第一主动旋转部件收紧第一丝线的情况下能够通过第一丝线将远端套管朝远端方向推送;以伸出至最远端的套管为终端套管,第二丝线一端固定于终端套管,另一端在管内朝近端方向延伸进而缠绕至第二主动旋转部件,第二主动旋转部件的位置配置为在收紧第二丝线的情况下能够将终端套管朝近端方向拉回。
3、本发明的伸缩结构,伸缩驱动采用绕线模组形成,重量更轻盈,同时绕线模组采用开放模式,即伸出与收缩采用了2根绕线分别实现,且整个绕线模组都位于空心套管内部,不占用外部空间,体积紧凑,对于绕线模组的使用安全性、耐久性能提高。
4、本发明中,第一丝线和/或第二丝线可以采用配置为钢丝绳,确保线材不易断裂。第一丝线一端固定于近端套管轴线一侧的顶部内侧壁,第一定滑轮固定于近端套管轴线另一侧的顶部内侧壁。
5、上述方案中,伸缩机构可以采用两节,即近端套管、远端套管各有一个,此方案牺牲伸出距离赢得结构简便优势。对于应用至直线驱动体系服务机器人的伸缩臂而言,作为一种改进方案,三节段甚至更多节段更为合适,伸缩能力以及缩回时位于底座上方空间达到机器人重心问题。三节段甚至更多节段的实现方式配置为远端套管具有至少两个,其中除终端套管外的其他套管为中间套管;中间套管的轴线两侧各设有一固定于其顶部内侧壁的动滑轮;第一丝线的另一端在管内的中间套管轴线一侧依次绕过各中间套管的底部、动滑轮后,穿过终端套管底部进入管内中间套管轴线另一侧,再依次绕过各中间套管另一侧的底部、动滑轮后经第一定滑轮缠绕至第一主动旋转部件。进一步地,在多节段基础上,各个远端套管的底部均设置动滑轮,动滑轮一方面用于引导第一丝线的传送轨迹,另一方面减小滑动摩擦,进而允许以较小驱动力达到伸缩节段目的,驱动电机选型允许小体积藏于近端套管空心内部。更进一步地,各套管同轴设置,且远端套管轴向两侧的对应动滑轮呈轴对称设置,通过同轴对称能够使得力的传输更效率顺畅。
6、作为另一种改进方案,第一主动旋转部件、第二主动旋转部件可以分别配置有致动器(如驱动电机)实施独立致动,此时伸出与缩回的驱动独立,伸缩机构的制造组装工艺要求低。也可以将第一主动旋转部件、第二主动旋转部件配置为绕线轮,两者同轴并统一受同一致动器致动,此时第一丝线、第二丝线以相反方向分别缠绕至对应的主动旋转部件,进一步降低重量以及达到结构紧凑化。在该方案中,由于收缩和拉伸过程中,绕线长度与最前端空心套管的移动长度不一致,故设计等比例的两个绕线轮,如1/4或1/2比例,根据各套管长度而定。在两个绕线轮共用驱动的基础上,第一主动旋转部件、第二主动旋转部件位于管内的远端套管下方;伸缩机构设置有位于第一定滑轮下方的第二定滑轮,第一丝线依次绕过第一定滑轮、第二定滑轮后缠绕至第一主动旋转部件,其中第二定滑轮用于引导自定滑轮到第一主动旋转部件之间的第一丝线形成对远端套管底部的避让,从而允许近端套管的长度减小,提升伸缩机构紧凑轻质性。
技术特征:
1.一种伸缩机构,其特征在于:
2.根据权利要求1所述的伸缩机构,其特征在于:
3.根据权利要求2所述的伸缩机构,其特征在于:各个远端套管的底部均设置有动滑轮用于引导第一丝线的传送轨迹。
4.根据权利要求3所述的伸缩机构,其特征在于:各套管同轴设置,且远端套管轴向两侧的对应动滑轮呈轴对称设置。
5.根据权利要求1所述的伸缩机构,其特征在于:
6.根据权利要求5所述的伸缩机构,其特征在于:
7.根据权利要求1所述的伸缩机构,其特征在于:
8.根据权利要求1所述的伸缩机构,其特征在于:
9.根据权利要求1所述的伸缩机构,其特征在于:所述第一丝线和/或第二丝线配置为钢丝绳。
技术总结
本发明涉及一种伸缩机构,该机构采用动滑轮和定滑轮方式来实现机构的伸缩功能。其主要包含近端套管、中间套管、远端套管、驱动电机、制动电机,以及传递动力的钢丝组成。在近端套管上布置有定滑轮,在中间套管上布置有动滑轮和定滑轮,在远端套管上布置有动滑轮,用于降低钢丝传递动力时,减小摩擦力,降低动力的损耗。两个电机互为驱动与制动,当机构拉伸时,1组电机为驱动,另一组电机则为制动;当机构收缩时,两个电机的作用正好相反。
技术研发人员:孙滕谌,王凯
受保护的技术使用者:北京他山科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!