一种免登高接地线装拆机器人装置的制作方法
本发明涉及接地线装拆设备,具体地说,涉及一种免登高接地线装拆机器人装置。
背景技术:
1、目前电力企业在开展各类停电施工作业中使用的接地线普遍采用手动旋钮紧固式接地线夹,工人在装设或拆除接地线时均需举爬杆塔进行手动操作,操作不够孰练的电力工人从登杆到装设完成至下杆平均需要30分钟的时间,熟练的工人完成接地线装设也需要近15分钟时间,既耗时又费力,且工人在攀爬杆塔及装设接地线过程中,发生的违章行为较多,存在较高的高坠及触电事故风险。
技术实现思路
1、本发明的目的在于提供一种免登高接地线装拆机器人装置,以解决上述背景技术中提出的接地线装设既耗时又费力,且工人在攀爬杆塔及装设接地线过程中,发生的违章行为较多,存在较高的高坠及触电事故风险的问题。
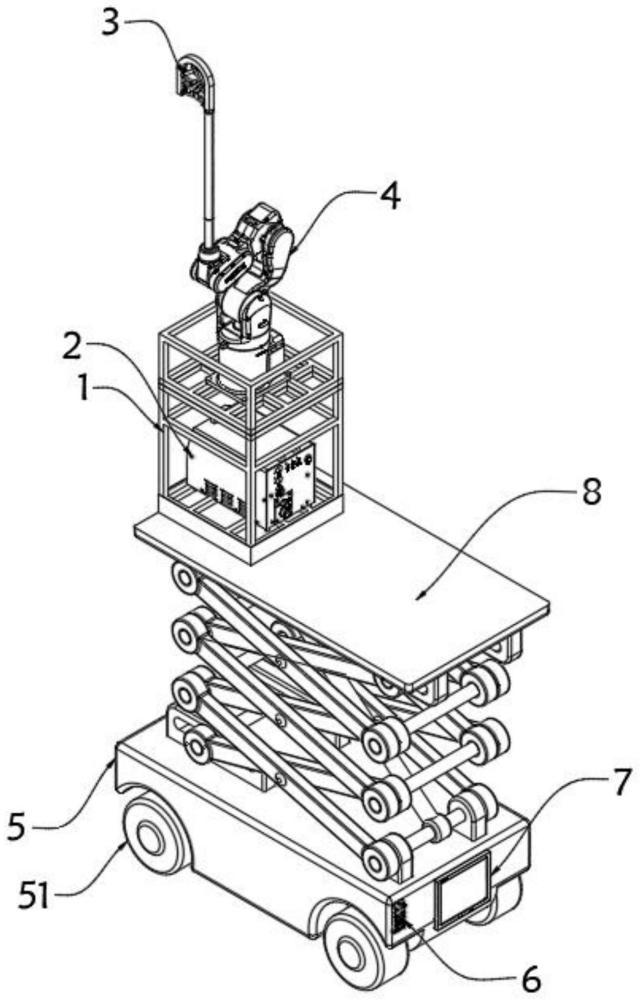
2、为实现上述目的,本发明提供了一种免登高接地线装拆机器人装置,包括外框架,所述外框架的内部下方安装有工控箱,所述外框架为长方体框架结构,所述外框架的内部上方安装有机器人,所述机器人的输出端安装有绝缘接地杆,所述外框架的底部安装有升降平台,所述升降平台的底部安装有移动车,所述升降平台的底部安装有伸缩组件,所述伸缩组件通过气缸实现伸缩动作,进而带动升降平台进行升降运动。
3、作为本发明的一种优选技术方案,所述移动车的一端安装有控制器和显示器。
4、作为本发明的一种优选技术方案,所述移动车的底部安装有滚轮。
5、作为本发明的一种优选技术方案,所述外框架的内部上方安装有上隔板,所述机器人的底端通过螺栓与上隔板连接固定,所述上隔板为矩形网格结构。
6、作为本发明的一种优选技术方案,所述外框架的内部下方安装有下隔板,所述工控箱的底部通过螺栓与下隔板连接固定,所述下隔板为矩形网格结构。
7、作为本发明的一种优选技术方案,所述外框架的底部安装有绝缘座。
8、作为本发明的一种优选技术方案,所述伸缩组件由自上而下组成的若干x形活动件组成,上下两个x形活动件的两端相互结构,x形的活动件的中部为铰接设置,所述伸缩组件的上下两端分别与升降平台和移动车连接。
9、作为本发明的一种优选技术方案,所述伸缩组件的顶部一端设置有上限位座,所述伸缩组件的底部另一端设置有下限位座,所述上限位座与升降平台连接,所述上限位座和下限位座的侧壁设置有横向的滑槽,最上端的x形活动件一端与上限位座滑动连接,最下端的x形活动件与下限位座滑动连接。
10、与现有技术相比,本发明的有益效果:
11、该免登高接地线装拆机器人装置中,能替代人工完成接地线挂、拆操作。操控人员在地面通过固定在机械臂上的无线摄像头实时查看接地棒与检修设备的相对位置,利用体感手套控制机器人的机械臂和电动实抓完成移动和抓取动作,并能将接地线操作棒精准地定位在指定位置,通过升降平台的升降能够实现高度的调节,方便对不同设备进行接地线的拆装操作。
技术特征:
1.一种免登高接地线装拆机器人装置,包括外框架(1),其特征在于:所述外框架(1)的内部下方安装有工控箱(2),所述外框架(1)为长方体框架结构,所述外框架(1)的内部上方安装有机器人(4),所述机器人(4)的输出端安装有绝缘接地杆(3),所述外框架(1)的底部安装有升降平台(8),所述升降平台(8)的底部安装有移动车(5),所述升降平台(8)的底部安装有伸缩组件(81),所述伸缩组件(81)通过气缸(82)实现伸缩动作,进而带动升降平台(8)进行升降运动。
2.根据权利要求1所述的免登高接地线装拆机器人装置,其特征在于:所述移动车(5)的一端安装有控制器(6)和显示器(7)。
3.根据权利要求1所述的免登高接地线装拆机器人装置,其特征在于:所述移动车(5)的底部安装有滚轮(51)。
4.根据权利要求1所述的免登高接地线装拆机器人装置,其特征在于:所述外框架(1)的内部上方安装有上隔板(11),所述机器人(4)的底端通过螺栓与上隔板(11)连接固定,所述上隔板(11)为矩形网格结构。
5.根据权利要求1所述的免登高接地线装拆机器人装置,其特征在于:所述外框架(1)的内部下方安装有下隔板(12),所述工控箱(2)的底部通过螺栓与下隔板(12)连接固定,所述下隔板(12)为矩形网格结构。
6.根据权利要求1所述的免登高接地线装拆机器人装置,其特征在于:所述外框架(1)的底部安装有绝缘座(13)。
7.根据权利要求1所述的免登高接地线装拆机器人装置,其特征在于:所述伸缩组件(81)由自上而下组成的若干x形活动件组成,上下两个x形活动件的两端相互结构,x形的活动件的中部为铰接设置,所述伸缩组件(81)的上下两端分别与升降平台(8)和移动车(5)连接。
8.根据权利要求7所述的免登高接地线装拆机器人装置,其特征在于:所述伸缩组件(81)的顶部一端设置有上限位座(83),所述伸缩组件(81)的底部另一端设置有下限位座(84),所述上限位座(83)与升降平台(8)连接,所述上限位座(83)和下限位座(84)的侧壁设置有横向的滑槽,最上端的x形活动件一端与上限位座(83)滑动连接,最下端的x形活动件与下限位座(84)滑动连接。
技术总结
本发明涉及接地线装拆设备技术领域,具体为一种免登高接地线装拆机器人装置,包括外框架,外框架的内部下方安装有工控箱,外框架为长方体框架结构,外框架的内部上方安装有机器人,机器人的输出端安装有绝缘接地杆,外框架的底部安装有升降平台,升降平台的底部安装有移动车,升降平台的底部安装有伸缩组件,伸缩组件通过气缸实现伸缩动作,进而带动升降平台进行升降运动。该免登高接地线装拆机器人装置中,能替代人工完成接地线挂、拆操作。操控人员在地面通过固定在机械臂上的无线摄像头实时查看接地棒与检修设备的相对位置,利用体感手套控制机器人的机械臂和电动实抓完成移动和抓取动作,并能将接地线操作棒精准地定位在指定位置。
技术研发人员:郭磊,雷亚兰,唐伟,李建东,张洁,张志荣,乔连留,尹红,张建,党军朋,罗红波,李康,孙云星,计全鑫,普晓敏,魏凡奇,时娟,李本惠,朱玉鑫,田琛琛,夏友识,徐丽丽,周鑫,罗雪,彭博,杨骐瑞,周廷锋,胡佳韵月,苏杭,师思,茶福顺,史斌,王永祥,杨力福,张谨谦,岳晓龙,李顺正,杨红涛,邓涛,朱辉,袁通海,方艳斌,施寿久,顾钊任,赵辉
受保护的技术使用者:云南电网有限责任公司玉溪供电局
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!