一种机器人高空自由行走的方法与流程
本发明涉及智能机器人领域,具体为一种机器人高空自由行走的方法。
背景技术:
1、在高空的危险作业,采用机器人来替代人工可以有效减少安全事故。现有的高空作业,如幕墙清洗、外墙喷涂、外墙安装、玻璃更换等,大部分还是采用人工作业。
2、如公开号为cn106476923a、cn208551642u的专利,现有的幕墙清洗机器人在进行高空清洗的时候,在机器人的顶部都必须设置保险绳以防止掉落,通过保险绳吊装于建筑物顶端的卷扬机上,通过启动卷扬机,保险绳吊装机器人在建筑物竖直方向上移动,当清洗好几列时,要移动建筑物上的卷扬机才可以继续进行清洗,清洗的过程须要人工不断移动保险绳的位置,导致清洗效率低。
技术实现思路
1、本发明的目的在于提供一种机器人高空自由行走的方法,以实现机器人在高空的快速移动。本发明采用以下技术方案:
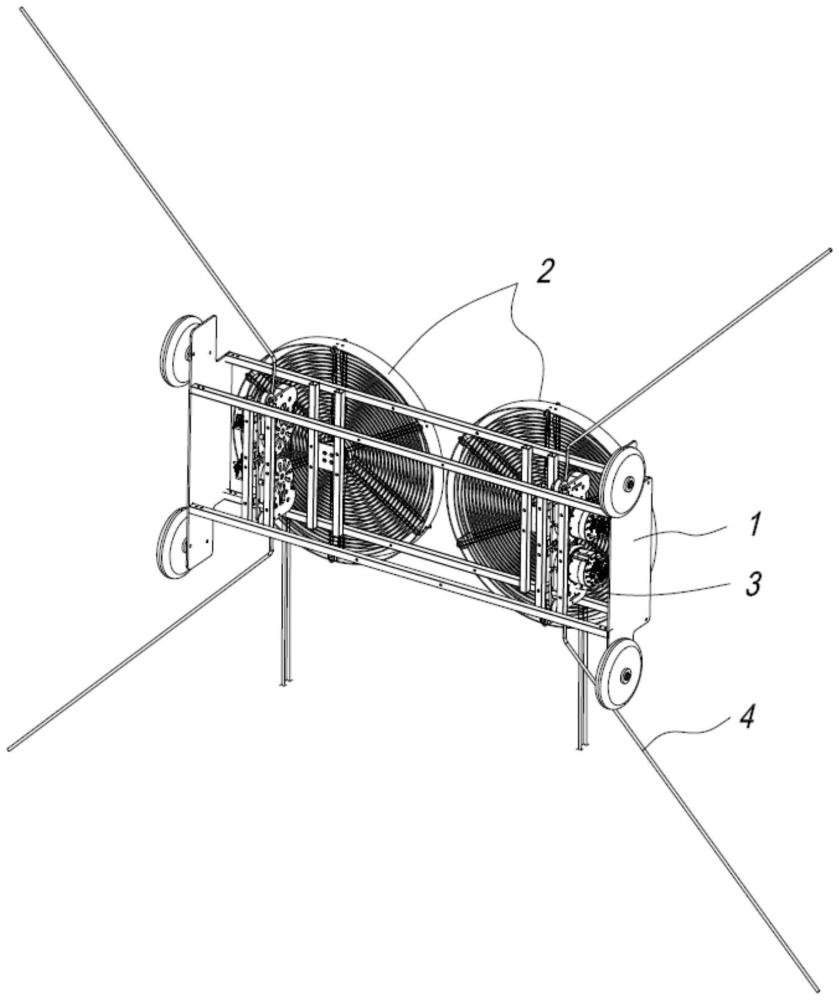
2、本发明公开了一种机器人高空自由行走的方法,所述机器人包括机架,安装在机架上的控制器、风机、四组抓绳机及四组绳体,所述抓绳机分别为设置在左上方、右上方、左下方、右下方的第一抓绳机、第二抓绳机、第三抓绳机及第四抓绳机,所述四组绳体分别为安装在第一抓绳机上的第一天索绳、安装在第二抓绳机上的第二天索绳、安装在第三抓绳机上的第一地索绳、安装在第四抓绳机上的第二地索绳;机器人自由行走的方法包括:
3、a.设定高空至地面的墙面做为机器人行走的工作面,在该工作面上建立坐标系:x轴和y轴互相垂直且位于工作面,z轴垂直于x轴和y轴。
4、b.将第一天索绳的一端拉紧固定于工作面的高空左侧的顶端,另一端穿过第一抓绳机并自由下垂,第一天索绳与第一抓绳机的连接点为第一受力点,第一天索绳固定端至第一受力点为第一拉紧段。
5、第二天索绳的一端拉紧固定于工作面的高空右侧的顶端,另一端穿过第二抓绳机并自由下垂,第二天索绳与第二抓绳机的连接点为第二受力点,第二天索绳固定端至第二受力点为第二拉紧段。
6、第一地索绳的一端拉紧固定于工作面的左侧的底端,另一端穿过第三抓绳机并自由下垂,第一地索绳与第三抓绳机的连接点为第三受力点,第一地索绳固定端至第三受力点为第三拉紧段。
7、第二地索绳的一端拉紧固定于工作面的右侧的底端,另一端穿过第四抓绳机并自由下垂,第二地索绳与第四抓绳机的连接点为第四受力点,第二地索绳固定端至第四受力点为第四拉紧段。
8、c.根据需要行走的目标位置的坐标,与当前的位置坐标进行比对,计算得到目标位置的第一拉紧段、第二拉紧段、第三拉紧段及第四拉紧段的收放长度。
9、d.控制器控制抓绳机,使第一拉紧段、第二拉紧段、第三拉紧段及第四拉紧段移动收放变化长度,机器人即行走至目标位置。
10、优选的,所述机架上安装有传感器;还包括步骤e.机器人行走至目标位置后,传感器将当前机器人的姿态发送至控制器,控制器将当前姿态与机器人初始设定的姿态进行对比,调整当前姿态至初始姿态。
11、进一步的,所述的风机为单侧安装或者双侧安装,当所述机架单侧安装时,安装于机架上远离墙面的一侧,所述风机启动给机架施加沿z轴方向的水平推力,多个所述风机的布置重心与机架重心重合。
12、进一步的,机器人由当前的工作面上的位置n移动至同一工作面位置m的计算过程包括:s1.计算四组绳体的收放长度△l。△l=ln-lm,ln为机架在n位置时的各绳体的拉紧段长度,lm为机架在m位置时的各绳体的拉紧段长度,△l为正数时,表示该绳体收紧,当△l为负数时,表示该绳放松。s2.计算各抓绳机的收放速度v。v=△l/t,t为机架从位置n移动到位置m的预先设定的时间;所述控制器控制各抓绳机按照速度v进行收紧或放松绳体,运行时间为t,从而使各组绳体移动收放长度△l。
13、优选的,以工作面的中心位置为坐标系原点,以坐标系原点沿x轴,y轴方向划定四个象限,以左上角为第一象限,顺时针划分第二象限、第三象限及第四象限;机器人在工作面位置时绳体的拉紧段长度的计算方法如下:
14、设定第一天索绳固定端的坐标为(xd1,yd1),第二天索绳固定端的坐标为(xd2,yd2),第一地索绳固定端的坐标为(xd3,yd3),第二地索绳固定端的坐标为(xd4,yd4),第一受力点的坐标为(x1,y1),第二受力点的坐标为(x2,y2),第三受力点的坐标为(x3,y3),第四受力点的坐标为(x4,y4);则第一拉紧段长度l1、第一拉紧段长度l2、第三拉紧段长度l3、第四拉紧段长度l4的计算公式如下:
15、a.受力点的坐标在第一象限时,计算公式如下:
16、b.受力点的坐标在第二象限时,计算公式如下:
17、c.受力点的坐标在第三象限时,计算公式如下:
18、d.受力点的坐标在第四象限时,计算公式如下:
19、进一步的,机器人由当前的工作面上的位置n移动至不同工作面位置m’的方法为:先将机器人由位置n移动至同一工作面位置m,然后将机器人由位置m移动至位置m',位置m'为位置m在z轴上移动一段距离得到,计算机器人在位置m'时各绳体的拉紧段长度为lm’,控制风机的风速给机架水平推力,使得机器人沿z轴方向移动至位置m'的位置,同时控制各绳体的收放长度△l'=lm’-lm。
20、其中,机器人在位置m'时绳体的第一拉紧段长度l1’、第一拉紧段长度l2’、第三拉紧段长度l3’、第四拉紧段长度l4’,位置m'与位置m的z轴方向上的距离为h,则各绳体的拉紧段长度的计算公式如下:
21、
22、进一步的,机器人由当前的工作面上的位置n移动至不同工作面位置m’的方法为:计算机器人在当前位置n时各绳体的拉紧段长度为ln,计算位置m'时各绳体的拉紧段长度为lm’,控制风机的风速给机架水平推力,使得机器人沿z轴方向移动至位置m'的位置,同时控制各绳体的收放长度:△l'=lm’-ln。
23、进一步的,机器人由位置m’移动至位置t’,其中位置m'与位置t'均不位于工作面上,则其过程为:s1.计算四组绳体的收放长度△l,△l=lm’-lt’,lm’为机架在m’位置时的各绳体的拉紧段长度,lt’为机架在t’位置时的各绳体的拉紧段长度,△l为正数时,表示该绳体收紧,当△l为负数时,表示该绳放松。s2.计算各抓绳机的收放速度v,v=△l/t,t为机架从位置m’移动到位置t’的预先设定的时间;s3.控制风机的风速给机架水平推力,使得机器人沿z轴方向移动至位置t’的位置,同时控制器控制各抓绳机按照速度v进行收紧或放松绳体,运行时间为t,从而使各组绳体移动收放长度△l。
24、其中,以工作面的中心位置为坐标系原点,以坐标系原点沿x轴,y轴方向划定四个象限,以左上角为第一象限,顺时针划分第二象限、第三象限及第四象限;机器人不在工作面位置时绳体的拉紧段长度的计算方法如下:设定第一天索绳固定端的坐标为(xd1,yd1,0),第二天索绳固定端的坐标为(xd2,yd2,0),第一地索绳固定端的坐标为(xd3,yd3,0),第二地索绳固定端的坐标为(xd4,yd4,0),第一受力点的坐标为(x1,y1,z1),第二受力点的坐标为(x2,y2,z2),第三受力点的坐标为(x3,y3,z3),第四受力点的坐标为(x4,y4,z4);则第一拉紧段长度l1、第一拉紧段长度l2、第三拉紧段长度l3、第四拉紧段长度l4的计算公式如下:
25、a.受力点的坐标在第一象限时:
26、b.受力点的坐标在第二象限时,计算公式如下:
27、c.受力点的坐标在第三象限时,计算公式如下:
28、d.受力点的坐标在第四象限时,计算公式如下:
29、其中,所述传感器包括测距传感器和角度传感器,所述机架上安装有清洗装置,或者喷涂装置,或者钻孔装置,或者运输箱等。
30、由于采用了上述结构,本发明具有以下有益效果:本发明通过设置四根受力绳体,通过控制四组绳体的拉紧段的收放,只需在施工前固定好四根绳体的固定端,即可实现机器人在整个工作面区域任意位置的移动,实现机器人的自由行走,有效的提升了机器人的行走效率。
- 还没有人留言评论。精彩留言会获得点赞!