有多个机械臂的多轴绘图机器人的制作方法
本发明涉及绘图机器人,具体的,涉及有多个机械臂的多轴绘图机器人。
背景技术:
1、绘图机器人是一种能够进行绘画和绘图任务的机器人,它们可以通过电脑或程序控制完成各种绘画任务,由于绘图机器人的精确性和可编程性,它们被广泛应用于艺术和创意领域,艺术家们可以利用绘图机器人的能力来实现独特的艺术创作,这些机器人可以绘制复杂的图案、绘画、插图和装饰品,展示出高度的创意和技术结合,并且绘图机器人也被广泛应用于教育和研究领域,它们可以作为教育工具,帮助学生学习几何、计算机编程和机器人技术,研究人员可以利用绘图机器人进行机器人控制算法、运动规划和路径生成等方面的研究。
2、而现有的绘图机器人在使用过程中存在一些问题,例如公开号为cn201911013380.1的一种绘图机器人以及绘图系统,其在工作过程中,虽能够通过使用滚珠轴承和安装在滚珠轴承中的铆钉对两个机械臂进行铰接,大大降低了机械臂转动时的摩擦力,保证了良好的绘图效果,但其只具备一个机械臂,因此当需要绘制彩图时,工作人员需要频繁的对机械臂上的绘图笔进行拆装更换,才能够完成彩图的绘制工作,现有的绘图机器人不能够利用多个机械臂的配合,同时使用多种颜色的绘图笔进行绘图工作,完成彩图的绘制工作,实用性较差,工作效率较低;现有的绘图机器人在工作过程中,不能够对绘图纸进行便捷稳定的夹持固定,同时不能够将绘图机器人便捷稳定的固定在工作台面上,因此绘图机器人在绘图过程中,绘图纸或机器人整体发生晃动时,极易影响绘图工作的稳定性和准确性,从而影响绘图质量;现有的绘图机器人在工作过程中,不能够对不同直径大小的绘图笔进行拆卸安装,同时不能够有效避免机器人行程过载导致绘图笔或绘图纸受损,导致资源浪费甚至绘图机器人出现受损,安全性较差,因此需要提供有多个机械臂的多轴绘图机器人来满足使用者的需求。
技术实现思路
1、本发明提出有多个机械臂的多轴绘图机器人,解决了相关技术中的绘图机器人不能够利用多个机械臂的配合,同时使用多种颜色的绘图笔进行绘图工作,完成彩图的绘制工作,且不能够对绘图纸进行便捷稳定的夹持固定,并且不能够将绘图机器人便捷稳定的固定在工作台面上,而且不能够对不同直径大小的绘图笔进行拆卸安装,同时不能够有效避免机器人行程过载导致绘图笔或绘图纸受损的问题。
2、本发明的技术方案如下:
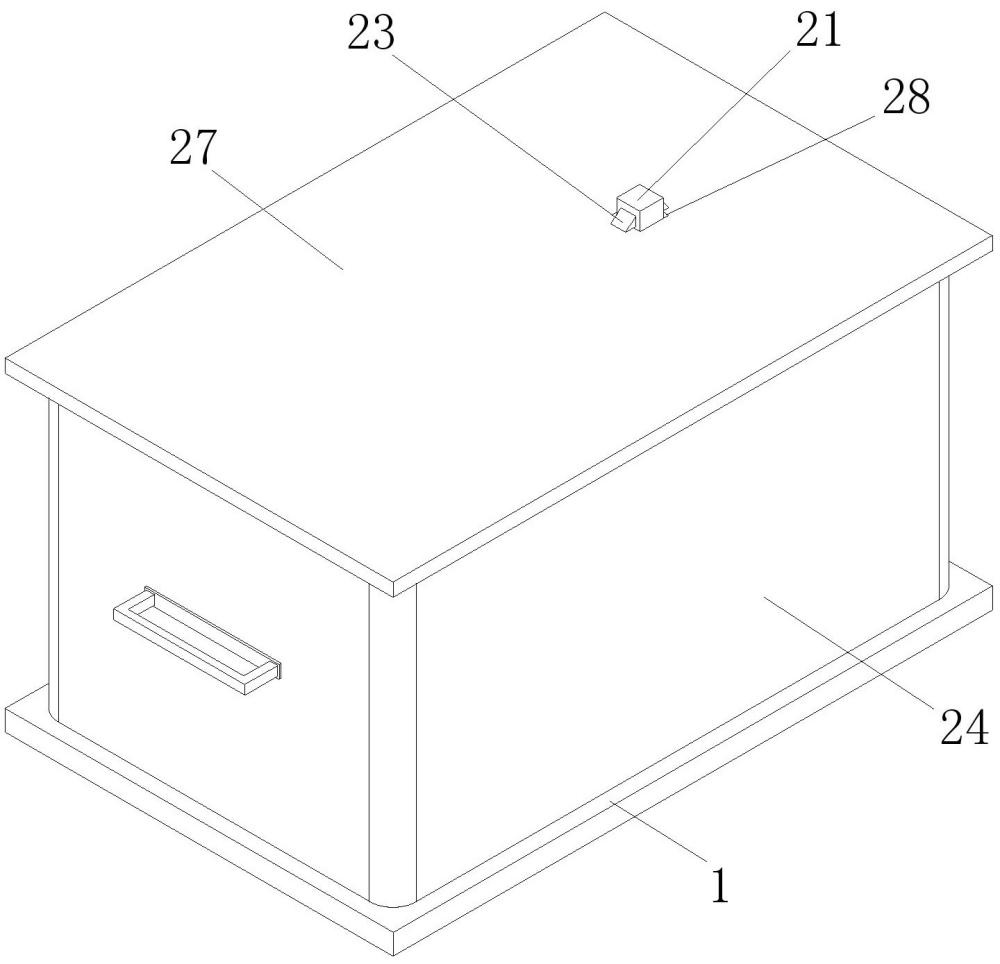
3、有多个机械臂的多轴绘图机器人,包括固定底板,所述固定底板的底端面上固定连接有支撑座,所述固定底板上安装有定位固定组件,所述固定底板的顶端面上安装有伺服电机,所述伺服电机的输出轴转动连接在所述固定底板上,所述伺服电机输出轴的底端固定连接有转动杆,所述转动杆上固定连接有限位块和导向杆,所述固定底板上转动连接有连接轴,所述连接轴的底端固定连接有固定框,所述固定框的内壁上固定连接有导向板,所述固定框的内部底端面上固定连接有导向框,所述连接轴的顶端固定连接有液压杆,所述液压杆通过轴承转动连接在所述固定底板上,所述液压杆的顶端固定连接有固定块,所述固定块上固定连接有第一连接座,所述第一连接座上安装有第一小型步进电机,所述第一小型步进电机的输出轴上固定连接有第一轴臂,所述第一轴臂上固定连接有第二连接座,所述第二连接座上安装有第二小型步进电机,所述第二小型步进电机的输出轴上固定连接有第二轴臂,所述第二轴臂上安装有定位拆装组件,所述固定块的顶端固定连接有定位杆,所述定位杆内固定连接有第四弹簧,所述第四弹簧的另一端固定连接有挡块,所述挡块限位滑动连接在所述定位杆内,所述定位杆贯穿滑动连接在防护罩内,所述防护罩的顶部开设有第一收纳框和第二收纳框,所述防护罩的顶端贴合连接有连接盖板,所述连接盖板上贯穿开设有定位槽,所述定位杆贯穿滑动连接在所述定位槽内。
4、作为本发明的一种优选方案,其中:所述定位固定组件包括固定杆,所述固定杆固定连接在所述固定底板的顶端面上,所述固定杆的底部侧端开设有卡槽,所述固定杆的顶端固定连接有第一弹簧,所述第一弹簧套设在所述固定杆上,所述第一弹簧的底端固定连接有夹持框,所述夹持框限位滑动连接在所述固定杆上,所述夹持框的底端面上固定连接有橡胶垫,所述夹持框的侧端固定连接有第二弹簧,所述第二弹簧的另一端固定连接有卡杆,所述卡杆贯穿滑动连接在所述夹持框的侧端。
5、作为本发明的一种优选方案,其中:所述固定杆对称分布在所述夹持框的两侧中间部位,所述夹持框的形状大小与所述橡胶垫的形状大小相同,所述固定杆通过所述卡槽与所述卡杆一一对应,所述卡杆的长度大于所述卡槽的长度。
6、作为本发明的一种优选方案,其中:所述夹持框的底端固定连接有牵引绳,所述牵引绳的底部缠绕在固定线圈上,所述固定线圈上固定连接有螺纹杆,所述螺纹杆上螺纹连接有连接套杆,所述连接套杆的端部固定连接有橡胶活塞,所述橡胶活塞限位滑动连接在固定管内,所述固定管固定连接在所述固定底板的底端面上,所述固定管的底部固定连接有网板,所述牵引绳对称分布在所述夹持框的左右两侧和前后两侧,所述牵引绳通过所述固定线圈与所述螺纹杆一一对应,所述固定管的横截面呈矩形,所述固定管的内壁与所述橡胶活塞的侧端面相贴合,所述连接套杆连接在所述橡胶活塞的中间部位。
7、作为本发明的一种优选方案,其中:所述固定管的侧端连接有导气管,所述导气管的另一端连接有中转框,所述中转框固定连接在所述固定底板的底端面上,所述中转框的底部连接有橡胶吸盘,所述螺纹杆上固定连接有涡卷弹簧,所述涡卷弹簧的外端固定连接在限位框内,所述限位框固定连接在所述固定管上,所述螺纹杆与所述固定管和所述限位框之间均为转动连接,所述橡胶吸盘等距分布在所述中转框的底部,所述橡胶吸盘的底端面与所述支撑座的底端面平齐。
8、作为本发明的一种优选方案,其中:所述限位块的侧端面和所述导向板的侧端面均呈圆弧状,所述导向板和所述导向框均设置有四个,四个导向板和四个导向框等角度分布在所述固定框内,所述导向板和所述导向框相间分布,所述导向板的高度大于所述导向框的高度,所述连接轴的中心轴线、固定框的中心轴线和液压杆的中心轴线位于同一竖直中心线上,所述液压杆的顶端固定连接在所述固定块的底端中心部位,所述第一连接座等角度分布在所述固定块上,所述第一连接座通过第一轴臂上的第二连接座与第二轴臂一一对应,所述第一连接座的形状大小与所述第二连接座的形状大小相同。
9、作为本发明的一种优选方案,其中:所述定位拆装组件包括第三弹簧,所述第三弹簧固定连接在所述第二轴臂上,所述第三弹簧的顶端固定连接有托板,所述托板的底端面上固定连接有安装筒,所述安装筒贯穿滑动连接在所述第二轴臂上,所述安装筒内转动连接有蜗杆,所述蜗杆上啮合连接有蜗轮,所述蜗轮上固定连接有传动轴,所述传动轴的顶端转动连接在所述安装筒的内部顶端面上,所述第三弹簧对称分布在所述托板的底部两侧,所述传动轴连接在所述安装筒的内部中心部位。
10、作为本发明的一种优选方案,其中:所述传动轴的底端固定连接有转盘,所述转盘上贯穿开设有滑动槽,所述滑动槽内限位滑动连接有滑动杆,所述滑动杆的底端固定连接有连接杆,所述连接杆的底端固定连接有夹持板,所述夹持板上固定连接有橡胶板,所述安装筒内固定连接有连接板,所述连接板上贯穿开设有连接槽,所述连接板限位滑动连接在所述连接槽内。
11、作为本发明的一种优选方案,其中:所述传动轴固定在所述转盘的顶部中心部位,所述滑动槽等角度分布在所述转盘上,所述滑动槽呈圆弧状,所述滑动槽与所述连接杆一一对应,所述夹持板的横截面呈圆弧状。
12、作为本发明的一种优选方案,其中:所述第四弹簧对称分布在所述定位杆的顶部两侧,所述第四弹簧与所述挡块一一对应,所述挡块的端部横截面呈直角梯形,所述连接盖板的长度和宽度分别大于所述防护罩横截面的长度和宽度。
13、本发明的工作原理及有益效果为:
14、1、本发明中设置有定位固定组件,通过卡槽和卡杆的卡合,能够利用夹持框的下移对绘图用纸进行便捷稳定的夹持固定,进而能够避免绘图过程中图纸发生位置偏移,从而能够保证后续绘图工作的稳定,且在夹持框下移的同时,涡卷弹簧能够带动螺纹杆自动转动,配合螺纹连接的连接套杆能够带动橡胶活塞在固定管中自动向边侧运动,利用气压作用下,通过导气管和中转框能够将各个橡胶吸盘内部空气自动抽吸,利用各个橡胶吸盘的内部负压,能够将绘图机器人整体吸附固定在工作台面上,保证绘图机器人在进行绘图工作时的稳定和安全,增加了绘图机器人的使用便捷性和稳定性。
15、2、本发明中设置有限位块和导向杆,利用伺服电机的驱动,通过转动杆上的限位块和导向杆,能够配合导向板和导向框带动固定框上的连接轴进行间歇转动,且每次转动90°,进而能够自动实现四个机械臂的切换,利用四个机械臂的切换,能够通过定位拆装组件对四种不同颜色的绘图笔进行自动切换,从而能够有效提升后续的绘图效率,弥补了现有的绘图机器人需要多次更换绘图笔才能够完成一个彩图的绘制,有效提高了绘图机器人对于彩图的绘图效率。
16、3、本发明中设置有定位拆装组件,利用蜗杆和蜗轮的啮合驱动,能够通过传动轴带动转盘稳定转动,此时利用转盘上的滑动槽,配合连接板上的连接槽,能够通过滑动杆带动各个连接杆上的夹持板同时向中间或边侧运动,进而能够对不同直径大小的绘图笔进行便捷稳定的夹持固定和拆卸工作,与此同时,利用第三弹簧和安装筒的弹性配合,能够避免机械臂行程过载导致绘图笔与绘图纸之间发生碰撞,导致绘图笔或绘图纸发生损坏,增加了绘图机器人的使用便捷性和安全性。
17、4、本发明中设置有定位杆和挡块,利用定位杆和挡块的配合,能够对防护罩和连接盖板同时进行卡合安装和拆卸脱离工作,利用卡合的防护罩能够对绘图机器人整体进行便捷稳定的罩起防护工作,避免绘图机器人在闲置过程中,受到外界不良影响导致损坏,并且利用防护罩上的第一收纳框和第二收纳框,能够分别对绘图纸和绘图笔进行便捷收纳,保证绘图机器人、绘图纸和绘图笔后续携带转运工作的便捷,而且利用连接盖板的卡合安装,能够对防护罩上的第一收纳框和第二收纳框进行便捷闭合,保证绘图纸和绘图笔后续转运携带工作的稳定,增加了绘图机器人的使用多样性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!