一种潜伏式转运机器人及控制方法与流程
本发明涉及转运机器人,更具体地说,涉及一种潜伏式转运机器人及控制方法。
背景技术:
1、目前,针对于特定系列的飞机机型机身的转运作业,通常采用传统的人工架车,依靠人力驱动转运架车,包括转弯和制动也完全依靠人力。由于机身具有自重大、长度长等原因,日常作业需大量人工且耗时较多,在安全上也完全需要人工把握,存在较大的风险。
2、另一方面,现有的转运架车的车体长度难以调节,很难满足不同工况下的使用需求。
3、为响应上级对军工场所作业模式现代化的要求,目前迫切需求一款省时省力的智能化转运装备,以改变现有的作业模式,达到充分减轻操作人员的劳动强度,大力提高作业效率的目标。
4、潜伏式转运机器人实现了飞机机体的运输功能,提高了生产的自动化程度,与原有的方式相比较,节约了大量劳动力,减轻了劳动强度,缩短了机体转运的时间,提高了生产线效率。
5、前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现思路
1、本发明的目的在于提供一种潜伏式转运机器人及控制方法,该潜伏式转运机器人实现了飞机机体的运输功能,提高了生产的自动化程度,节约了大量劳动力,减轻了劳动强度,缩短了机体转运的时间,提高了生产线效率。
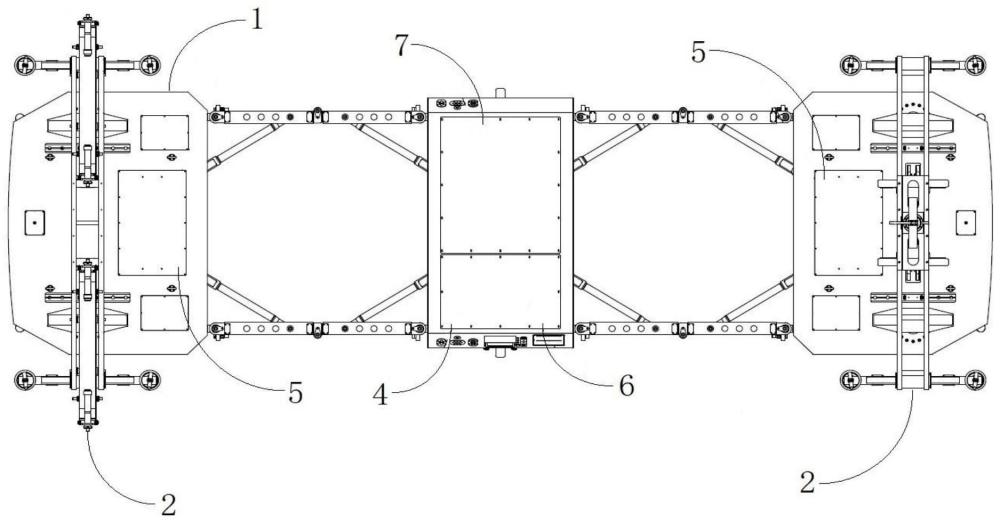
2、本发明提供一种潜伏式转运机器人,包括本体框架,所述本体框架包括驱动框架、中部框架、伸缩连接臂和支撑臂;在所述中部框架的两端均铰接有两条所述伸缩连接臂,所述伸缩连接臂另一端铰接有所述驱动框架;所述伸缩连接臂包括外臂、内臂和销轴,所述外臂的一端通过所述销轴和所述驱动框架铰接,所述外臂的另一端通过所述销轴和所述内臂铰接,所述内臂另一端通过所述销轴和所述中部框架铰接;在所述驱动框架靠近所述中部框架的一侧上设有凸齿条和第一螺栓孔,在所述中部框架的两侧设有和所述凸齿条以及第一螺栓孔配合的凹齿条和第二螺栓孔;当所述外臂和所述内臂转动折叠在一起时,所述凸齿条卡接在所述凹齿条中,并将螺栓穿过第一螺栓孔和第二螺栓孔,通过螺母和螺栓结合将驱动框架和中部框架之间拉紧进行固定;所述支撑臂包括第一支撑臂和第二支撑臂,当螺母和螺栓从所述第一螺栓孔和所述第二螺栓孔上拆下时,此时将所述外臂和所述内臂之间拉直;所述第一支撑臂一端可拆卸的固定在所述驱动框架上、所述第一支撑臂另一端可拆卸的固定在所述外臂上,将所述外臂和所述驱动框架之间的铰接转动进行固定;所述第二支撑臂一端可拆卸的固定在所述中部框架上、所述第二支撑臂另一端可拆卸的固定在所述内臂上,将所述内臂和所述中部框架之间的铰接转动进行固定。
3、采用上述技术方案,当中部框架两侧的外臂和内臂均转动折叠在一起时,此时本体框架的长度最短;当中部框架两侧的外臂和内臂有其中一侧折叠在一起、其中另一侧的外臂和内臂拉直并通过支撑臂固定时,此时本体框架为中等长度;当中部框架两侧的外臂和内臂均拉直并通过支撑臂固定时,此时本体框架的长度最长;通过中部框架两侧的外臂和内臂之间的折叠和拉直状态的切换,使得本体框架有三种长度(非对称设计可实现四种长度),从而实现潜伏式转运机器人的车体长度调节,满足不同工况下的使用需求;另外,为保证本体框架在最短长度下的车体钢度,采用凸齿条和凹齿条独特的对接齿条结构,改善由于中间车体过重,导致的中间车体下沉,车体货台上平面不平的问题。
4、进一步地,所述凸齿条和所述凹齿条上的齿角为60度。由于中部框架下沉与驱动框架有高度差,为了便于对接,齿条上的齿设计为60度角,对接时凸齿条与凹齿条互相导入,不但弥补高度差,而且增大了齿面的接触面积,增加了强度。
5、进一步地,所述潜伏式转运机器人还包括工装托架,所述工装托架包括第一分体托架和第二分体托架,在所述第一分体托架和第二分体托架的下方均设有容纳空间,两个所述驱动框架分别位于所述容纳空间中。第一分体托架和第二分体托架分别用于承托飞机的前部和后部,托架下方留有的容纳空间,方便本体框架运行至工装托架底部。
6、进一步地,所述潜伏式转运机器人还包括舵轮驱动系统,所述舵轮驱动系统安装在所述本体框架底部的四个边角处;所述舵轮驱动系统包括旋转臂、摆动臂、车轮总成、液压油缸、第一电机、第一减速机、旋转支撑部、第二电机和第二减速机。
7、进一步地,所述潜伏式转运机器人还包括主控系统,所述主控系统安装在所述中部框架上;所述主控系统包括主处理器和协处理器;所述主处理器和所述协处理器之间的通讯采用rs232通讯方式,按照设定好的通讯格式完成数据发送与接收;所述主处理器包括主控模块和扩展模块,扩展模块包括rs485通讯模块、rs232通讯模块、数字量输入模块、数字量输出模块和模拟量输入模块。主处理器采用plc,优势是稳定性和设计直观,负责人机交互、控制逻辑和功能保护;协处理器采用arm内核的运动控制卡,优势在于处理速度和解算能力,负责运动控制模型的解算和各种数据总线协议;采用主处理器和协处理器的双处理器架构有较强的协作能力,同时互为验证,提高了系统的安全性。
8、进一步地,所述潜伏式转运机器人还包括液压控制系统,所述液压控制系统安装在所述本体框架的上面,所述液压控制系统和所述主控系统连接;所述液压控制系统包括液压油箱、过滤器、液位传感器、溢流阀、温度传感器、液压泵、第三电机、手动泵、单向阀、压力表、压力传感器、带旁通阀过滤器、三维四通电磁阀、液控单向阀、储能器、单向节流阀、液压油缸和锁紧油缸。
9、进一步地,所述潜伏式转运机器人还包括安全防护系统,所述安全防护系统安装在所述中部框架上,所述安全防护系统和所述主控系统连接;所述安全防护系统包括制动模块,系统安全、防误操作设计、电气安全、激光避障安全防护和语音播报。
10、进一步地,所述潜伏式转运机器人还包括人机交互系统,所述人机交互系统安装在所述中部框架上,所述人机交互系统和所述主控系统连接;所述人机交互系统包括遥控器、控制按钮、触摸显示屏和远程辅助急停终端。
11、进一步地,所述潜伏式转运机器人还包括电源系统,所述电源系统和所述主控系统连接连接;所述电源系统用于电池状态的估算和故障诊断以及保护。
12、进一步地,在所述本体框架上设置有二维码定位探头,所述二维码定位探头和所述主控系统连接,在所述驱动框架上远离所述中部框架的一侧设置有二维码;当所述二维码定位探头探测到对应的二维码时,本体框架在液压油缸的控制下升起,将工装托架举起。
13、进一步地,在所述本体框架上设置有夹紧机构,所述夹紧机构包括后铰接座、连接销、锁紧油缸、前铰接座和夹爪;所述后铰接座固定在所述本体框架上,用连接销将锁紧油缸尾端与铰接座铰接,前铰接座固定在本体框架上,用连接销分别将锁紧油缸头端与夹爪、前铰接座与夹爪铰接在一起。当锁紧油缸伸长时,夹爪下压工装托架,可使工装托架牢牢夹紧在车体上,夹紧动作完成后本体框架可以将工装托架背负运到指定位置;当锁紧油缸缩回时,夹爪脱开工装托架,可使工装托架与车体释放开。
14、本发明还提供一种控制方法,应用于上述的潜伏式转运机器人。
15、进一步地,所述控制方法包括以下步骤:
16、s1:主处理器通过rs232通讯模块向协处理器发送控制信号,协处理器向主处理器的rs232通讯模块发送反馈信号;
17、s2:协处理器通过can总线芯片向伺服驱动器发送运动指令,实现多种运动控制;
18、s3:协处理器通过rs485总线芯片接收倾角传感器反馈信息,协处理器通过rs232总线芯片与遥控器实现人机信号交互;
19、s4:主处理器与触摸屏之间的通讯采用以太网通讯方式,按照设定好的通讯协议,触摸屏向主处理器发送人工操作信息,主处理器向触摸屏发送触摸屏界面需要显示的状态信息,实现触摸屏与主处理器之间的人机交互功能;
20、s5:主处理器通过rs485总线模块按照设定好的通讯协议向语音模块发送语音指令,语音模块根据接收到的语音指令控制扬声器发出指定声音;
21、s6:主处理器通过扩展模块中的模拟量输入模块采集位移传感器、压力传感器、温度传感器、电池信息,经过主处理器主控模块的程序转化,参与到程序的指令控制中;
22、s7:主处理器通过扩展模块中的数字量输入模块采集限位传感器、按钮、激光避障传感器信号;
23、s8:主处理器通过扩展模块中的数字量输出模块向指示灯、声光报警器、激光避障传感器发送控制信号。
24、本发明提供的潜伏式转运机器人,通过中部框架两侧的外臂和内臂之间的折叠和拉直状态的切换,使得本体框架有三种长度(非对称设计可实现四种长度),从而实现潜伏式转运机器人的车体长度调节,满足不同工况下的使用需求;另外,为保证本体框架在最短长度下的车体钢度,采用凸齿条和凹齿条独特的对接齿条结构,改善由于中间车体过重,导致的中间车体下沉,车体货台上平面不平的问题;实现了飞机机体的运输功能,提高了生产的自动化程度,与原有的方式相比较,节约了大量劳动力,减轻了劳动强度,缩短了机体转运的时间,提高了生产线效率。
- 还没有人留言评论。精彩留言会获得点赞!