一种目标药瓶抓取方法、装置、设备及存储介质
本发明涉及机械臂,具体涉及目标药瓶抓取方法、装置、设备及存储介质。
背景技术:
1、在制药流水线中,会发生药瓶跌倒的情况,但是制药整个过程需要在洁净区的洁净度为a级的环境下进行,制药流水线上捡扶药瓶的作业人员需要做好无菌处理,要求较高,且工作环境艰苦。并且,由于药瓶跌倒发生的情况并不太多,导致工作人员的有效工作时间很短,成本很大。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种目标药瓶抓取方法、装置、设备及存储介质,以解决现有抓取制药流水线中跌倒药瓶的技术中,利用人工进行捡扶导致的成本较高、效率较低的问题。
2、根据本发明实施例的第一方面,提供一种目标药瓶抓取方法,包括:
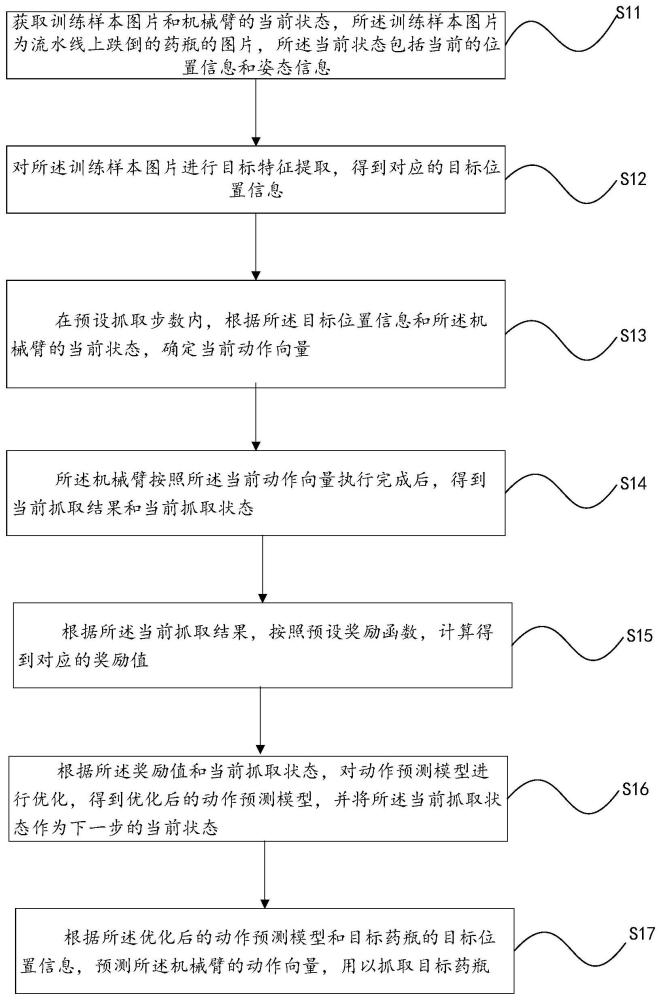
3、获取训练样本图片和机械臂的当前状态,所述训练样本图片为流水线上跌倒的药瓶的图片,所述当前状态包括当前的位置信息和姿态信息;
4、对所述训练样本图片进行目标特征提取,得到对应的目标位置信息;
5、在预设抓取步数内,根据所述目标位置信息和所述机械臂的当前状态,确定当前动作向量;
6、所述机械臂按照所述当前动作向量执行完成后,得到当前抓取结果和当前抓取状态;
7、根据所述当前抓取结果,按照预设奖励函数,计算得到对应的奖励值;
8、根据所述奖励值和当前抓取状态,对动作预测模型进行优化,得到优化后的动作预测模型,并将所述当前抓取状态作为下一步的当前状态;
9、根据所述优化后的动作预测模型和目标药瓶的目标位置信息,预测所述机械臂的动作向量,用以抓取目标药瓶。
10、优选地,所述根据所述目标位置信息和所述机械臂的当前状态,确定当前动作向量,包括:
11、若所述机械臂的当前状态为初始状态,随机确定所述机械臂在多个方向上的偏移值和偏移角度;
12、根据所述多个方向上的偏移值和偏移角度,确定当前动作向量。
13、优选地,所述方法还包括:
14、将所述当前状态、所述当前动作向量、所述当前抓取状态和所述奖励值作为一条经验数据存储至经验池。
15、优选地,所述方法还包括:
16、判断所述经验池是否存满,若已经存满,从所述经验池中随机选取多条经验数据,输入动作预测模型,对所述动作预测模型进行优化,并将所述经验池中最早的经验数据进行删除。
17、优选地,所述当前抓取结果中包括发生碰撞的次数、是否抓取成功、与所述目标位置信息的距离和当前步数,所述根据所述当前抓取结果,按照预设奖励函数,计算得到对应的奖励值,包括:
18、根据所述发生碰撞的次数,确定碰撞奖励;
19、根据所述当前动作向量,判断所述机械臂是否超出预设运动范围,确定运动范围奖励;
20、根据所述机械臂的抓取结果为抓取成功或抓取失败,确定结果奖励;
21、根据与所述目标位置信息的距离,确定距离奖励;
22、根据当前步数,确定步数奖励;
23、根据所述目标位置信息和所述机械臂的姿态信息,确定角度奖励;
24、将所述碰撞奖励、运动范围奖励、结果奖励、距离奖励、步数奖励和角度奖励进行加权求和,得到对应的奖励值。
25、根据本发明实施例的第二方面,提供一种目标药瓶抓取装置,包括:
26、训练图片获取模块,用于获取训练样本图片和机械臂的当前状态,所述训练样本图片为流水线上跌倒的药瓶的图片,所述当前状态包括当前的位置信息和姿态信息;
27、目标特征提取模块,用于对所述训练样本图片进行目标特征提取,得到对应的目标位置信息;
28、动作向量确定模块,用于在预设抓取步数内,根据所述目标位置信息和所述机械臂的当前状态,确定当前动作向量;
29、结果获取模块,用于所述机械臂按照所述当前动作向量执行完成后,得到当前抓取结果和当前抓取状态;
30、计算模块,用于根据所述当前抓取结果,按照预设奖励函数,计算得到对应的奖励值;
31、模型训练模块,用于根据所述奖励值和当前抓取状态,对动作预测模型进行优化,得到优化后的动作预测模型,并将所述当前抓取状态作为下一步的当前状态;
32、目标抓取模块,用于根据所述优化后的动作预测模型和待检测药瓶的目标位置信息,预测所述机械臂的动作向量,用以抓取目标药瓶。根据本发明实施例的第三方面,提供一种目标药瓶抓取设备,包括:
33、存储器,其上存储有可执行程序;
34、处理器,用于执行所述存储器中的所述可执行程序,以实现上述任一项所述方法的步骤;
35、机械臂,用于按照所述当前动作向量执行当前动作。
36、根据本发明实施例的第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使计算机执行上述任一项所述方法的步骤。
37、本发明的实施例提供的技术方案可以包括以下有益效果:
38、通过获取训练样本图片和机械臂的当前状态,由于训练样本图片为流水线上跌倒的药瓶的图片,当前状态包括当前的位置信息和姿态信息;对训练样本图片进行目标特征提取,得到对应的目标位置信息;在预设抓取步数内,根据目标位置信息和机械臂的当前状态,确定当前动作向量;机械臂按照当前动作向量执行完成后,得到当前抓取结果和当前抓取状态;根据当前抓取结果,按照预设奖励函数,计算得到对应的奖励值;根据奖励值和当前抓取状态,对动作预测模型进行优化,得到优化后的动作预测模型,并将当前抓取状态作为下一步的当前状态;根据优化后的动作预测模型和目标药瓶的目标位置信息,预测机械臂的动作向量,用以抓取目标药瓶,由于优化后的动作预测模型是经过跌倒的药瓶的图片训练得到的,所以具有经验,可以根据流水线上的跌倒的目标药瓶,预测出机械臂的动作向量,让机械臂根据动作向量抓取到跌倒的目标药瓶,效率更高,无需人工进行参与,节省了人力资源和时间成本,有效解决了抓取制药流水线中跌倒药瓶的技术中,利用人工进行捡扶导致的成本较高、效率较低的问题的。
39、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种目标药瓶抓取方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标位置信息和所述机械臂的当前状态,确定当前动作向量,包括:
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述当前抓取结果中包括发生碰撞的次数、是否抓取成功、与所述目标位置信息的距离和当前步数,所述根据所述当前抓取结果,按照预设奖励函数,计算得到对应的奖励值,包括:
6.一种目标药瓶抓取装置,其特征在于,包括:
7.一种目标药瓶抓取设备,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使计算机执行权利要求1~5任一项所述方法的步骤。
技术总结
本发明涉及目标药瓶抓取方法、装置、设备及存储介质,属于机械臂技术领域。本发明包括:获取训练样本图片和机械臂的当前状态,对训练样本图片进行目标特征提取,得到对应的目标位置信息,确定当前动作向量;机械臂按照所述当前动作向量执行完成后,得到当前抓取结果和当前抓取状态;按照预设奖励函数,计算得到对应的奖励值,对动作预测模型进行优化,得到优化后的动作预测模型,并将当前抓取状态作为下一步的当前状态;根据优化后的动作预测模型和目标药瓶的目标位置信息,所述机械臂的动作向量用以抓取目标药瓶。通过本发明,有助于解决现有抓取制药流水线中跌倒药瓶的技术中,利用人工进行捡扶导致的成本较高、效率较低的问题。
技术研发人员:刘强,温旭强,滕达,王文通,王建康
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!