手爪组件及机器人的制作方法
本发明涉及机器人,特别是涉及一种手爪组件及机器人。
背景技术:
1、当我们搭建起机器人平台,尝试进行自动化细胞培养、自动化移液配液的时,需要搭载一套功能满足、易用、兼容性好且拓展性强的手爪,替代操作人员的手去处理操作各种耗材(离心管、培养皿、培养瓶、计数板等)、存取样本(冻存管等)、持操工具(移液器等)以及操作设备(开关培养箱、冷藏箱、恒温箱的门),去支撑这些场景的自动化应用。而常规的机器人使用快换工具盘进行工具的更换,快换工具盘需要在气源条件才能使用,使用条件和使用场景受限,且不适合小型机器人,此外,现有机器人的手爪功能单一且不灵活,只能针对特定的耗材进行抓取,例如离心管或冻存管等,当需要对培养瓶或移液器进行抓取时,需要单独配置手爪,不同类型的耗材无法兼容抓取,操作繁琐。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种手爪组件,该手爪组件能够解决现有技术中无气源条件下无法实现工具模块快换的问题,无需配置气源,实现全电气化连接。
2、本发明提供一种手爪组件,包括安装法兰、连接器模块、机器人电爪和夹持组件,所述安装法兰连接于机器人的机械臂末端,所述连接器模块和所述机器人电爪分别连接于所述安装法兰,所述夹持组件连接于所述机器人电爪,所述机器人电爪通过所述夹持组件夹持工具模块或物件,当需要通过工具模块进行功能扩展时,所述机器人电爪通过所述夹持组件可快速夹持所述工具模块,所述连接器模块与所述工具模块电性连接,所述连接器模块用于为所述工具模块供电和通讯连接。
3、在一实施例中,所述连接器模块固定连接有连接母座,所述工具模块固定连接有连接公座,所述连接母座与所述连接公座配合使所述连接器模块与所述工具模块电性连接。
4、在一实施例中,所述连接器模块还包括第一进气单元,所述工具模块包括第二进气单元,所述第一进气单元与所述第二进气单元连通,气管与所述第一进气单元连通,气源通过所述第一进气单元、所述第二进气单元驱动所述工具模块。
5、在一实施例中,所述连接器模块靠近所述工具模块的一端固定连接有至少两个导向销,所述工具模块设有至少两个与所述导向销配合的导向孔,当所述连接器模块与所述工具模块连接时,各所述导向销分别设置在各所述导向孔内;或所述工具模块靠近所述连接器模块的一端固定连接有至少两个导向销,所述连接器模块设有至少两个与所述导向销配合的导向孔,当所述连接器模块与所述工具模块连接时,各所述导向销分别设置在各所述导向孔内。。
6、在一实施例中,所述机器人电爪包括相对设置的第一电爪和第二电爪,所述机械臂末端可控制所述第一电爪和所述第二电爪相互靠近或相互远离,所述夹持组件包括第一夹持部和第二夹持部,所述第一夹持部连接于所述第一电爪,所述第二夹持部连接于所述第二电爪,所述第一夹持部设有第一夹槽,所述第二夹持部设有第三夹槽,所述第一夹持部的第一夹槽与所述第二夹持部的第三夹槽配合以夹持所述工具模块的握柄或所述物件。
7、在一实施例中,所述工具模块设有握柄,所述握柄包括相对设置的第一定位面、第二定位面以及相对设置的第三定位面和第四定位面,所述第一定位面与所述第二定位面固定连接于所述第三定位面与所述第四定位面之间,当所述手爪组件夹持所述握柄时,所述第一夹槽与所述第一定位面、所述第三定位面接触,所述第三夹槽与所述第二定位面、所述第四定位面接触。
8、在一实施例中,所述握柄固定连接有定位环,所述定位环绕所述握柄的轴线方向周向设置,所述第一夹持部设有第二夹槽,所述第二夹槽与所述第一夹槽垂直设置,所述第二夹持部设有第四夹槽,所述第四夹槽与所述第三夹槽垂直设置,所述手爪组件夹持所述工具模块时,所述定位环设置在所述第二夹槽和所述第三夹槽内以进行定位。
9、在一实施例中,所述工具模块固定连接有控制板,所述控制板与所述连接公座电性连接,所述控制板用于转接通讯。
10、在一实施例中,所述手爪组件还包括视觉模块,所述视觉模块固定连接于所述安装法兰,所述视觉模块用于对物件或工具模块进行识别和定位。
11、本发明还涉及一种机器人,包括上述的手爪组件。
12、本发明的手爪组件将机器人电爪和连接器模块分别与安装法兰连接,机器人电爪通过夹持组件可夹持不同类型的物件,当需要进行工具模块的扩展时,使用夹持组件夹持工具模块的握柄,然后将工具模块与连接器模块电性连接,即可在无气源条件下实现工具模块的快速扩展使用,结构简单,操作便捷,且通过连接器模块可为工具模块提供稳定的供电和通讯连接,应用场景广泛,全面支持自动化场景的应用。
技术特征:
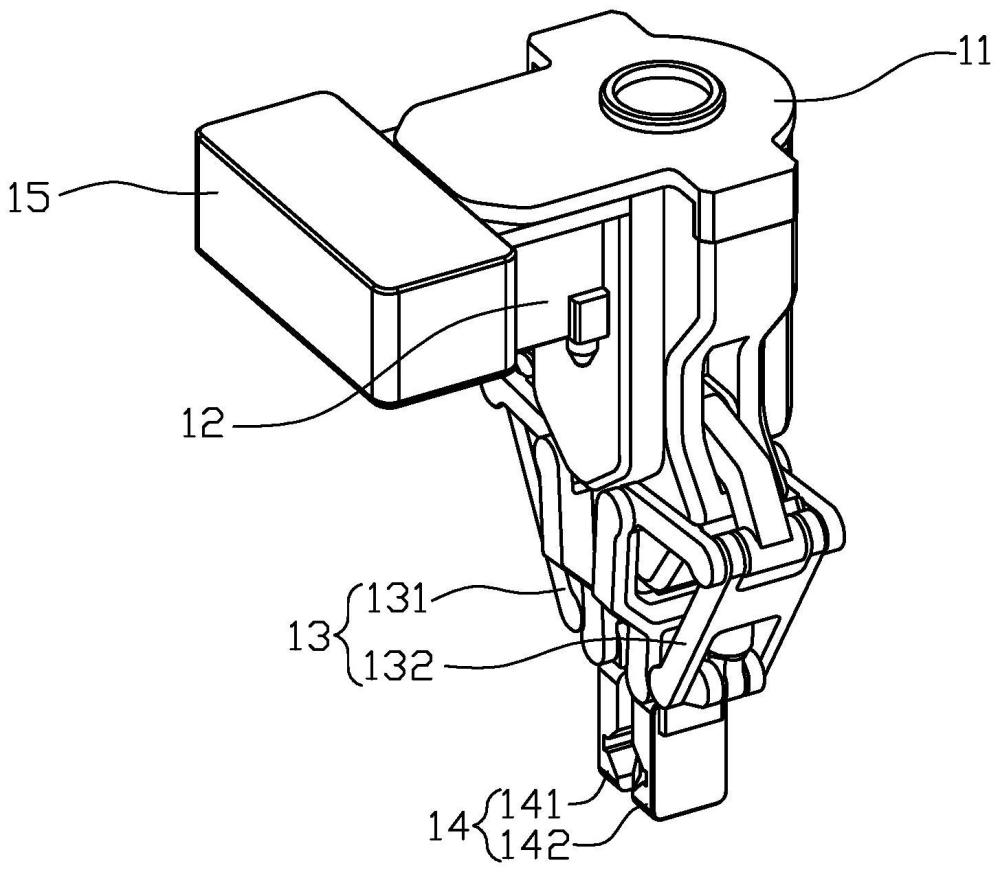
1.一种手爪组件,其特征在于,包括安装法兰(11)、连接器模块(12)、机器人电爪(13)和夹持组件(14),所述安装法兰(11)连接于机器人的机械臂末端,所述连接器模块(12)和所述机器人电爪(13)分别连接于所述安装法兰(11),所述夹持组件(14)连接于所述机器人电爪(13),当需要通过工具模块(20)进行功能扩展时,所述机器人电爪(13)通过所述夹持组件(14)可快速夹持所述工具模块(20),所述连接器模块(12)与所述工具模块(20)电性连接,所述连接器模块(12)用于为所述工具模块(20)供电和通讯连接。
2.如权利要求1所述的手爪组件,其特征在于,所述连接器模块(12)固定连接有连接母座(121),所述工具模块(20)固定连接有连接公座(21),所述连接母座(121)与所述连接公座(21)配合使所述连接器模块(12)与所述工具模块(20)电性连接。
3.如权利要求2所述的手爪组件,其特征在于,所述连接器模块(12)还包括第一进气单元,所述工具模块(20)包括第二进气单元,所述第一进气单元与所述第二进气单元连通,气管与所述第一进气单元连通,气源通过所述第一进气单元、所述第二进气单元驱动所述工具模块(20)。
4.如权利要求2或3所述的手爪组件,其特征在于,所述连接器模块(12)靠近所述工具模块(20)的一端固定连接有至少两个导向销(122),所述工具模块(20)设有至少两个与所述导向销(122)配合的导向孔(201),当所述连接器模块(12)与所述工具模块(20)连接时,各所述导向销(122)分别设置在各所述导向孔(201)内;或所述工具模块(20)靠近所述连接器模块(12)的一端固定连接有至少两个导向销(122),所述连接器模块(12)设有至少两个与所述导向销(122)配合的导向孔(201),当所述连接器模块(12)与所述工具模块(20)连接时,各所述导向销(122)分别设置在各所述导向孔(201)内。
5.如权利要求4所述的手爪组件,其特征在于,所述机器人电爪(13)包括相对设置的第一电爪(131)和第二电爪(132),所述机械臂末端可控制所述第一电爪(131)和所述第二电爪(132)相互靠近或相互远离,所述夹持组件(14)包括第一夹持部(141)和第二夹持部(142),所述第一夹持部(141)连接于所述第一电爪(131),所述第二夹持部(142)连接于所述第二电爪(132),所述第一夹持部(141)设有第一夹槽(101),所述第二夹持部设有第三夹槽(103),所述第一夹持部(141)的第一夹槽(101)与所述第二夹持部(142)的第三夹槽(103)配合以夹持所述工具模块(20)的握柄(23)或所述物件。
6.如权利要求5所述的手爪组件,其特征在于,所述工具模块(20)设有握柄(23),所述握柄(23)包括相对设置的第一定位面(232)、第二定位面(233)以及相对设置的第三定位面(234)和第四定位面(235),所述第一定位面(232)与所述第二定位面(233)固定连接于所述第三定位面(234)与所述第四定位面(235)之间,当所述手爪组件夹持所述握柄(23)时,所述第一夹槽(101)与所述第一定位面(232)、所述第三定位面(234)接触,所述第三夹槽(103)与所述第二定位面(233)、所述第四定位面(235)接触。
7.如权利要求6所述的手爪组件,其特征在于,所述握柄(23)固定连接有定位环(231),所述定位环(231)绕所述握柄(23)的轴线方向周向设置,所述第一夹持部(141)设有第二夹槽,所述第二夹槽与所述第一夹槽(101)垂直设置,所述第二夹持部设有第四夹槽(104),所述第四夹槽(104)与所述第三夹槽(103)垂直设置,所述手爪组件夹持所述工具模块(20)时,所述定位环(231)设置在所述第二夹槽(101)和所述第三夹槽(103)内以进行定位。
8.如权利要求2所述的手爪组件,其特征在于,所述工具模块(20)固定连接有控制板(22),所述控制板(22)与所述连接公座(21)电性连接,所述控制板(22)用于转接通讯。
9.如权利要求1所述的手爪组件,其特征在于,所述手爪组件还包括视觉模块(15),所述视觉模块(15)固定连接于所述安装法兰(11),所述视觉模块(15)用于对工具模块(20)进行识别和定位。
10.一种机器人,其特征在于,包括权利要求1至9任一项所述的手爪组件。
技术总结
本发明提供一种手爪组件,包括安装法兰、连接器模块、机器人电爪和夹持组件,安装法兰连接于机器人的机械臂末端,连接器模块和机器人电爪分别连接于安装法兰,夹持组件连接于机器人电爪,机器人电爪通过夹持组件夹持工具模块或物件,当需要通过工具模块进行功能扩展时,机器人电爪通过夹持组件可快速夹持工具模块,连接器模块与工具模块电性连接,连接器模块用于为工具模块供电和通讯连接。本发明的手爪组件能够解决现有技术中无气源条件下无法实现工具模块快换的问题,无需配置气源,实现电气化连接。本发明还涉及一种机器人。
技术研发人员:欧阳永志,李立,王昌杰,林祥春
受保护的技术使用者:盈合(深圳)机器人与自动化科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!