操作机器人及其控制方法与流程
本发明涉及机器人领域,尤其涉及一种操作机器人及其控制方法。
背景技术:
1、发电厂的高压配电间,根据容量的大小,其内一般设有为数不少的配电柜。配电间的日常巡检和操作若由人工进行,易存在安全隐患,因此,现有技术中利用巡检操作机器人来代替人工对配电间进行巡检及操作。
2、其中,对配电柜进行简单操作的机器人,其上一般设有操作机构,机器人移动到位后,操作机构再对操作部件进行相应的操作。
3、但是,对于如35kv型的高压配电柜等体积较为高大的高压配电柜,这类高压配电柜上的地刀离地高度较高,且这类高压配电柜上的手车操作难度较大,现有的对配电柜进行操作的机器人不能很好地对这类配电柜进行操作。
技术实现思路
1、本发明的第一个目的在于提供一种操作机器人,其旨在解决现有技术中操作机器人针对体积较为高大的配电柜进行操作难度大的技术问题。
2、为达到上述目的,本发明提供的方案是:
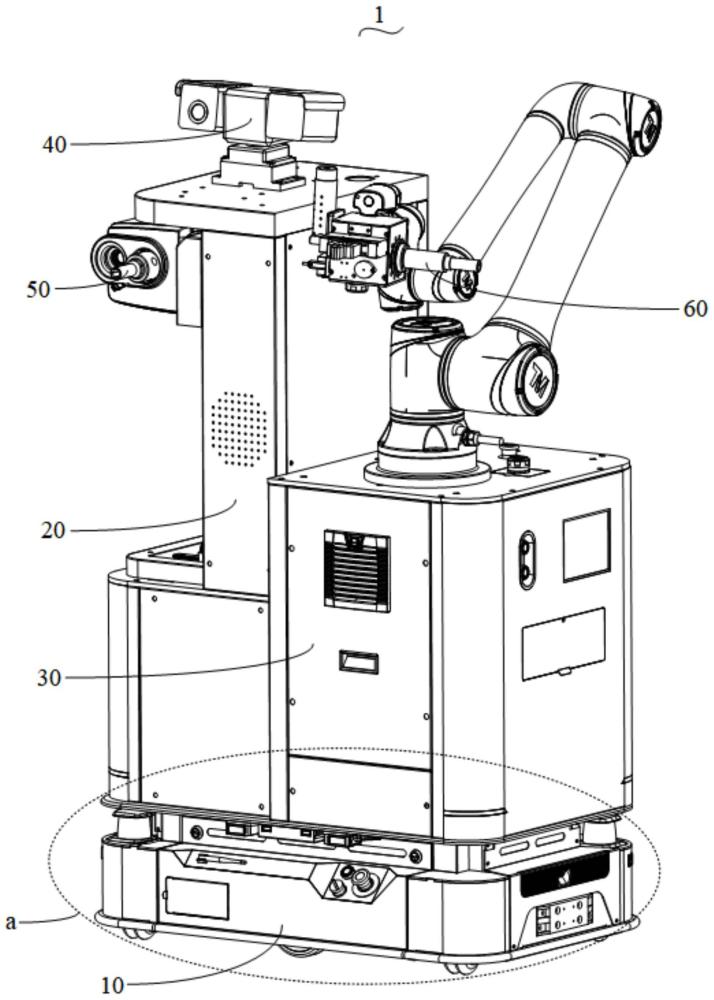
3、一种操作机器人,用于对配电柜进行操作,所述配电柜具有柜体面板,所述柜体面板上设有地刀、手车及用于遮挡手车的遮挡件,其中,所述操作机器人包括移动底盘、第一放置台、第二放置台、视觉识别机构、第一操作机构和第二操作机构,
4、所述第一放置台和所述第二放置台并排设置在所述移动底盘上,所述移动底盘用于带动所述第一放置台和所述第二放置台在支撑面上移动;
5、所述第一放置台背对所述移动底盘的一面与支撑面之间的距离大于所述第二放置台背对所述移动底盘的一面与支撑面之间的距离;
6、所述视觉识别机构设于所述第一放置台背对所述移动底盘的一面,并至少用于识别柜体面板的显示信息;
7、所述第一操作机构设于所述第一放置台远离所述第二放置台的一侧面,并位于所述视觉识别机构的下方,所述第一操作机构用于操作配电柜的地刀;
8、所述第二操作机构设于所述第二放置台背对所述移动底盘的一面,所述第二操作机构至少用于移开遮挡件以显露手车,以及用于操作配电柜的手车。
9、在一些实施例中,所述第一放置台包括第一承载台和第二承载台,所述第一承载台安装在所述移动底盘上,所述第二承载台安装在所述第一承载台的顶部;
10、所述第二承载台远离所述第二放置台的一面设有凹槽,所述第一操作机构活动装设于所述凹槽内,所述视觉识别机构装设于所述第二承载台的顶部。
11、在一些实施例中,所述第二承载台设有语音装置,所述语音装置用于通讯连接外部主控模块,并以语音的方式播报操作机器人的当前状态,及播放工作人员的声音。
12、在一些实施例中,所述第一放置台和所述第二放置台沿所述移动底盘的长度方向并排设置。
13、在一些实施例中,所述移动底盘的顶部设有支撑板,所述第一放置台和所述第二放置台均安装在所述支撑板的顶部,
14、所述操作机器人还包括传感器模块,所述传感器模块装设在所述支撑板的底部,并位于所述移动底盘的外侧,
15、所述传感器模块用于获取柜体面板的柜面姿态信息,所述移动底盘还用于根据所述传感器模块识别的柜面姿态信息,调整所述操作机器人与柜体面板的相对位置,以使所述操作机器人正对柜体面板。
16、在一些实施例中,所述第二操作机构包括机械臂和手车操作机构,所述机械臂连接于所述第二放置台,所述机械臂的末端与所述手车操作机构连接,以用于驱动所述手车操作机构移动;
17、所述机械臂还用于驱动所述手车操作机构移开遮挡件以显露手车,所述手车操作机构用于对手车摇进摇出。
18、在一些实施例中,所述手车操作机构包括驱动件、连接件、第一套筒、第二套筒和弹性件,所述驱动件设于所述机械臂的末端,所述驱动件驱动连接所述连接件,并用于驱动所述连接件转动;
19、所述第一套筒套设在部分所述第二套筒的外周,所述连接件分别传动连接所述第一套筒和所述第二套筒,以分别带动所述第一套筒和所述第二套筒转动;
20、所述第二套筒远离所述连接件的一端用于对配电柜的手车摇进摇出;
21、所述弹性件设于所述第一套筒内,且所述弹性件的两端分别与所述连接件和所述第二套筒相抵;
22、所述第二套筒还用于在对接手车时,相对于所述第一套筒伸缩。
23、在一些实施例中,所述连接件设有连接轴,所述连接轴的部分伸进所述第二套筒内,并与所述第二套筒传动连接;
24、所述第一套筒远离所述第二套筒的一端传动套接在所述连接件上;
25、所述弹性件围设于所述连接轴,所述第二套筒还用于对接手车时,相对于所述第一套筒沿所述连接轴的轴向方向伸缩。
26、在一些实施例中,所述连接轴沿其轴向的正投影呈方形,以限制第二套筒相对于连接轴沿周向转动。
27、在一些实施例中,所述第一套筒设有轴孔,所述轴孔包括第一孔段和第二孔段,所述第一孔段与所述第二孔段沿同一轴线依次连通,所述第一孔段的孔径大于所述第二孔段的孔径;
28、所述第二套筒包括沿同一轴线依次连接的第一轴部和第二轴部,所述第一轴部的外径大于所述第二轴部的外径;
29、所述第一轴部的轴向一端抵顶于所述弹性件,所述第一轴部的轴向另一端抵顶于所述第一孔段与所述第二孔段交界处形成的台阶端面。
30、本发明的第二个目的在于提供一种操作机器人的控制方法,应用上述的操作机器人,其中,所述控制方法包括:
31、根据导航信息,控制移动底盘移动,以使操作机器人移动到预设操作位;
32、操作机器人获取控制指令,所述控制指令包括第一指令和第二指令;
33、当所述控制指令为第一指令,则控制第一操作机构操作配电柜的地刀;
34、当所述控制指令为第二指令,则控制第二操作机构先移开遮挡件以显露手车,再操作配电柜的手车。
35、在一些实施方式中,柜体面板设有位于地刀附近的第一识别模块,所述地刀包括地刀操作轴以及设于地刀操作轴的第二识别模块,所述第二识别模块包括第一识别特征以及位于第一识别特征中心的第二识别特征,沿所述地刀操作轴的轴向方向,所述第二识别特征的中心与所述地刀操作轴的中心正投影重合,其特征在于,
36、所述第一操作机构可活动地装设与所述第一放置台,且所述第一操作机构具有用于对地刀操作的执行件,所述第一操作机构包括第一视觉定位器和第二视觉定位器,所述第一操作机构操作配电柜的地刀的步骤包括:
37、根据所述第一指令,控制第一视觉定位器识别所述第一识别模块,以获取所述第一操作机构相对于所述地刀的位置;
38、根据所述地刀的位置控制所述第一操作机构移动,以使所述第一操作机构正对所述地刀;
39、控制所述第二视觉定位器获取所述第一识别特征,并根据第一识别特征获取执行件相对于地刀的位置,之后控制第一操作机构移动,从而调整所述执行件的位置正对地刀;
40、控制所述第二视觉定位器获取第二识别特征,并根据第二识别特征获取执行件相对于地刀的角度,控制第二操作机构驱动执行件转动,调节执行件相对于地刀的角度,以使执行件对正地刀操作轴;
41、控制执行件对接地刀操作轴,并对地刀操作轴进行转动操作。
42、本发明提供的操作机器人具有以下有益效果:
43、本实施例的操作机器人设置第一放置台的高度大于第二放置台的高度,从而抬高装设在第一放置台上的视觉识别机构的高度,以及抬高装设在第一放置台上的第一操作机构的高度,进而视觉识别机构具有更高的视野,方便视觉识别机构获取柜体面板的显示信息,以便于操作机器人执行对应的操作,重要的是,第一操作机构能够对接距离地面更高的地刀,使得操作机器人能够对体积较为高大的配电柜(如35kv型的高压配电柜)进行操作。
44、本实施例的操作机器人中,第二操作机构在对手车进行操作时可以移开配电柜上用于遮挡手车的遮挡件,使手车显露出来,方便第二操作机构对手车进行操作,降低了对手车的操作难度,整体上降低对体积较为高大的配电柜进行操作的难度。
45、本实施例的操作机器人合理布局视觉识别机构、第一操作机构和第二操作机构的位置,提高了视觉识别机构、第一操作机构和第二操作机构的结构紧凑性,以及提高了操作机器人的重心平衡度及车体稳定性,从而操作机器人在移动过程中更平稳、更平衡,提高操作机器人在执行对配电柜的操作稳定性,从而提高操作地刀和手车的成功率。
- 还没有人留言评论。精彩留言会获得点赞!