一种烟包码垛机器人的路径规划方法与流程
本发明涉及烟草物流领域,特别涉及一种烟包码垛机器人的路径规划方法。
背景技术:
1、烟草物流配送中心的烟包件是根据配送区域内客户订单中的条烟数量和品种进行打包,再利用人工从输送线上搬运到码笼车内进行码垛。打包流水线上输出的烟包包含的条烟数量不等、品种各式各样,烟包外面用薄膜热塑进行包装。烟包码垛的特点是传送带上输出的烟包位置不固定,尺寸大小不同。在烟包码垛的过程中会出现某个区域烟包的位置过高,导致后续码放烟包时,机械臂与前面码放的烟包产生干涉,无法合理地利用码笼车空间码放烟包。
技术实现思路
1、本发明的目的在于提供一种烟包码垛机器人的路径规划方法,优化机械臂码放烟包空间运动轨迹。
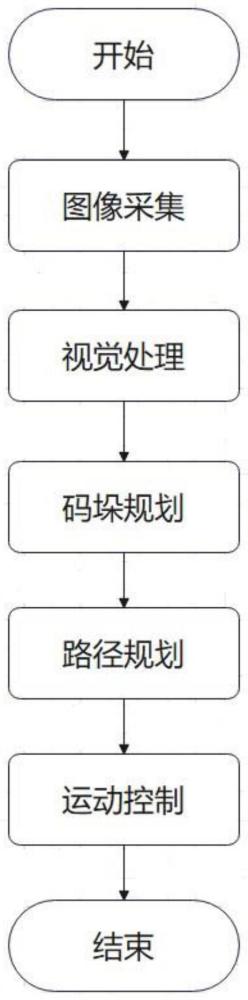
2、为了实现上述目的,本发明提供如下技术方案:一种烟包码垛机器人的路径规划方法,待码放烟包通过机械臂码放于码笼车中,包括以下步骤:对所述待码放烟包和所述码笼车进行图像采集;对采集到的图像进行视觉处理,对图像中所述待码放烟包的空间信息和所述码笼车的布局信息进行识别;根据所述待码放烟包的尺寸和所述码笼车的布局信息,确认所述待码放烟包在所述码笼车内的码放位置和码放顺序;通过所述码笼车的布局信息对所述机械臂的码垛路径进行规划;判断所述机械臂按照所述码垛路径移动时所述机械臂和所述待码放烟包是否会与环境中的物体发生碰撞,若发生碰撞则重新规划所述码垛路径并重复本步骤,若未发生碰撞则将当前的所述码垛路径设为最终码垛路径。
3、进一步地,所述待码放烟包的空间信息包括:所述待码放烟包的尺寸信息、所述待码放烟包的外接立方体的几何中心在空间中的坐标和所述待码放烟包的长度方向的偏转角度。
4、进一步地,所述码笼车的布局信息包括:所述码笼车内的当前码放层内的空闲区域数量、空闲区域尺寸、空闲区域位置和空闲区域的参考点坐标。
5、进一步地,所述待码放烟包和所述码笼车通过3d相机进行图像采集,采集到的图像为所述待码放烟包和所述码笼车在空间中的点云图。
6、进一步地,所述确认所述待码放烟包在所述码笼车内的码放位置包括:遍历权利所述码笼车的空闲区域,将所述空闲区域与所述待码放烟包进行匹配从而获得所述待码放烟包在所述码笼车内的码放位置。
7、分析可知,本发明公开一种烟包码垛机器人的路径规划方法,本发明在具体摆放过程中,通过前面码垛区域的码放情况对机械臂码垛路径轨迹进行规划,避免碰撞到前码垛区域的烟包,达到优化机械臂码放烟包空间运动轨迹的效果。
技术特征:
1.一种烟包码垛机器人的路径规划方法,待码放烟包通过机械臂码放于码笼车中,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种烟包码垛机器人的路径规划方法,其特征在于,所述待码放烟包的空间信息包括:所述待码放烟包的尺寸信息、所述待码放烟包的外接立方体的几何中心在空间中的坐标和所述待码放烟包的长度方向的偏转角度。
3.根据权利要求1所述的一种烟包码垛机器人的路径规划方法,其特征在于,所述码笼车的布局信息包括:所述码笼车内的当前码放层内的空闲区域数量、空闲区域尺寸、空闲区域位置和空闲区域的参考点坐标。
4.根据权利要求1所述的一种烟包码垛机器人的路径规划方法,其特征在于,所述待码放烟包和所述码笼车通过3d相机进行图像采集,采集到的图像为所述待码放烟包和所述码笼车在空间中的点云图。
5.根据权利要求3所述的一种烟包码垛机器人的路径规划方法,其特征在于,所述确认所述待码放烟包在所述码笼车内的码放位置包括:遍历权利所述码笼车的空闲区域,将所述空闲区域与所述待码放烟包进行匹配从而获得所述待码放烟包在所述码笼车内的码放位置。
技术总结
本发明提供一种烟包码垛机器人的路径规划方法,包括以下步骤:对待码放烟包和码笼车进行图像采集;对采集到的图像进行视觉处理;根据待码放烟包的尺寸和码笼车的布局信息,确认待码放烟包在码笼车内的码放位置和码放顺序;通过码笼车的布局信息对机械臂的码垛路径进行规划;判断机械臂按照码垛路径移动时机械臂和待码放烟包是否会与环境中的物体发生碰撞,若发生碰撞则重新规划码垛路径并重复本步骤,若未发生碰撞则将当前的码垛路径设为最终码垛路径,本发明在具体摆放过程中,通过前面码垛区域的码放情况对机械臂码垛路径轨迹进行规划,避免碰撞到前码垛区域的烟包,达到优化机械臂码放烟包空间运动轨迹的效果。
技术研发人员:豆尚成,孙卫,李燃,李天南,石林昊,宫硕实
受保护的技术使用者:中电科机器人有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!