具有多个末端执行器的物料操纵机器人的制作方法
示例性和非限制性实施例大体上涉及一种物料操纵机器人,并且更具体地涉及一种具有多个末端执行器的物料操纵机器人。
背景技术:
1、物料操纵机器人(诸如,例如,用于在半导体晶片处理系统中的应用)是已知的。可以在以下美国专利和专利公开(其通过引用的方式以其整体并入本文)中找到一些示例:美国专利号9,149,936公开了非圆形带轮可以被如何计算;美国专利公开号us2016/0167229a1;以及美国专利公开号us2017/0028546 a1。
技术实现思路
1、以下
技术实现要素:
仅仅旨在是示例性的。本发明内容不旨在限制权利要求书的范围。
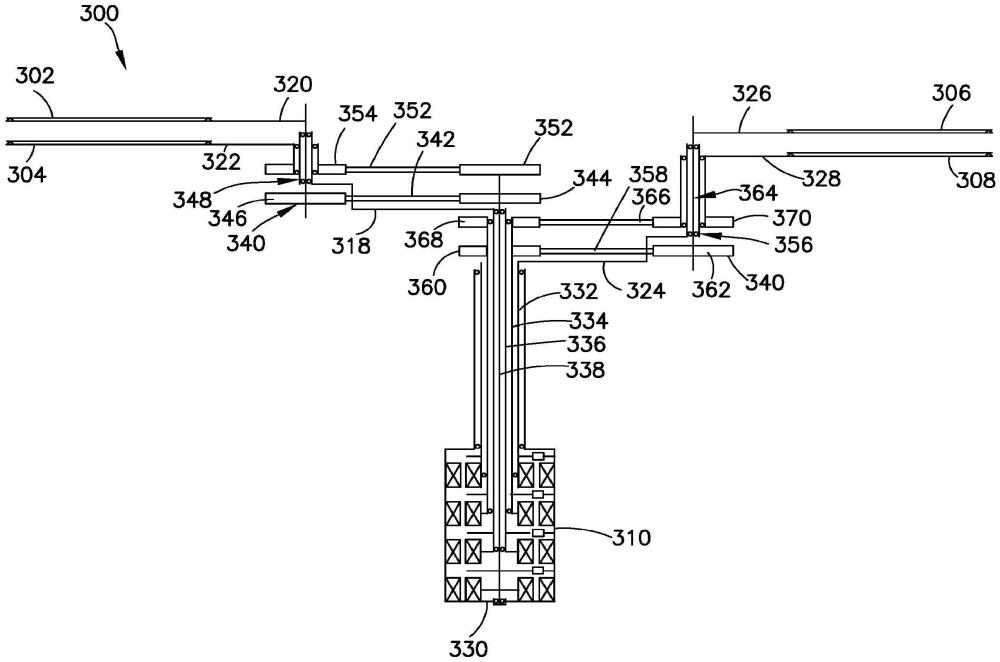
2、根据一个方面,在一种装置中提供了示例,该装置包括:机器人驱动器,该机器人驱动器包括马达和被连接至马达的同轴驱动轴;机器人臂,该机器人臂被连接至机器人驱动器,其中,机器人臂包括两个上臂、被连接至上臂中的第一上臂的第一组前臂、被连接至上臂中的第二上臂的第二组前臂和被连接至前臂中的相应前臂的末端执行器,其中,第一上臂和第二上臂被连接至同轴驱动轴中的相应第一同轴驱动轴和第二同轴驱动轴,其中,第一组前臂被安装在第一上臂上并且通过相应的第一传动带组件和第二传动带组件被连接至同轴驱动轴中的第三同轴驱动轴,其中,第二组前臂被安装至第二上臂并且通过相应的第三传动带组件和第四传动带组件被连接至同轴驱动轴中的第四同轴驱动轴。
3、根据另一方面,一种示例方法包括:将第一上臂连接至机器人驱动器的第一同轴驱动轴;将第二上臂连接至机器人驱动器的第二同轴驱动轴;将第一组前臂连接至第一上臂,其中,第一传动带布置将第一组前臂中的第一前臂连接至机器人驱动器的第三同轴驱动轴,并且其中,第二传动带布置将第一组前臂中的第二前臂连接至机器人驱动器的第三同轴驱动轴;将第二组前臂连接至第二上臂,其中,第三传动带布置将第二组前臂中的第一前臂连接至机器人驱动器的第四同轴驱动轴,并且其中,第四传动带布置将第二组前臂中的第二前臂连接至机器人驱动器的第四同轴驱动轴;以及将相应的末端执行器连接至前臂。
4、根据另一方面,一种示例方法包括:使机器人驱动器的第一同轴驱动轴沿第一方向绕着第一轴线旋转以使机器人臂的第一上臂绕着第一轴线旋转;在第一同轴驱动轴被旋转时使机器人驱动器的第二同轴驱动轴绕着第一轴线旋转以移动第一传动带布置和第二传动带布置,并且因此,使第一上臂上的第一前臂和第二前臂旋转;使机器人驱动器的第三同轴驱动轴沿第二方向绕着第一轴线旋转以使机器人臂的第二上臂绕着第一轴线旋转;以及使机器人驱动器的第四同轴驱动轴绕着第一轴线旋转以移动第三传动带布置和第四传动带布置,并且因此,使第二上臂上的第三前臂和第四前臂旋转。
5、根据另一方面,一种示例方法可以包括:使机器人驱动器的第一同轴驱动轴沿第一方向绕着第一轴线旋转以使机器人臂的至少一个上臂绕着第一轴线旋转;在第一同轴驱动轴被旋转时使机器人驱动器的第二同轴驱动轴绕着第一轴线旋转以至少移动第一传动带布置以使至少一个上臂上的第一前臂旋转并且使第一前臂上的第一末端执行器从缩回位置朝向伸展位置伸展;以及当第一末端执行器从缩回位置朝向伸展位置而被移动时,使机器人驱动器的第三同轴驱动轴沿第二方向绕着第一轴线旋转以至少移动第二传动带布置以使至少一个上臂上的第二前臂旋转并且使第二前臂上的第二末端执行器保持处于缩回位置。
6、根据另一方面,一种示例方法包括:基于参考点的从参考点的开始位置到参考点的结束位置的所需路径(其中,参考点在机器人臂上的末端执行器上),确定与开始位置对应的夹角和与结束位置对应的夹角,其中,机器人臂被连接至机器人驱动器,机器人驱动器具有用于使机器人臂移动的马达;至少部分地基于夹角来计算在末端执行器上的参考点的径向坐标中的轨迹;基于计算得出的径向坐标来计算末端执行器上的参考点的对应角度坐标,使得末端执行器上的参考点遵循在开始位置与结束位置之间的所需路径;使用逆运动学的修正公式,将补充有轨迹的夹角和末端执行器的对应角速度和加速度的、末端执行器上的参考点的径向坐标和角度坐标转换为所需关节位置、速度和加速度以形成用于机器人臂的运动设定点;以及基于运动设定点来控制机器人驱动器的马达使机器人臂移动。
7、根据另一方面,一种示例方法包括:由控制器确定机器人臂的末端执行器上的参考点在参考点的开始位置与结束位置之间的路径,其中,机器人臂被连接至具有用于移动机器人臂的马达的机器人驱动器,并且其中,控制器包括至少一个处理器和具有计算机代码的至少一个非暂时性存储器;控制器从多种不同的移动控制模式中选择移动控制模式,其中,不同的移动控制模式包括:确定在开始位置与结束位置之间的路径与机器人臂的运动学奇点相交,并且不利用该路径来执行机器人臂的移动,确定在开始位置与结束位置之间的路径在与机器人臂的运动学奇点相距某一预定阈值距离之外通过,并且使用笛卡尔轨迹生成方案来移动机器人臂,以及确定在开始位置与结束位置之间的路径在与机器人臂的运动学奇点相距的预定阈值距离之内通过,确定与开始位置对应的夹角和与结束位置对应的夹角,根据关节坐标来计算开始位置和结束位置,至少部分地基于夹角来计算在径向坐标中从开始位置到结束位置的轨迹,计算参考点的对应角度坐标,使得参考点遵循笛卡尔空间中的在开始位置与结束位置之间的路径;以及控制器基于所选择的控制模式来控制机器人臂的马达的移动。
8、根据另一方面,可以在一种装置中提供示例实施例,该装置包括:至少一个处理器;以及至少一个非暂时性存储器,该至少一个非暂时性存储器包括计算机程序代码,至少一个存储器和计算机程序代码被配置为利用至少一个处理器来使该装置:通过至少一个处理器和计算机程序代码确定机器人臂的末端执行器上的参考点在参考点的开始位置与参考点的结束位置之间的具有轨迹的路径,其中,机器人臂被连接至具有用于使机器人臂移动的马达的机器人驱动器;通过至少一个处理器和计算机程序代码从多种不同的移动控制模式中选择移动控制模式,其中,多种不同的移动控制模式包括:确定在开始位置与结束位置之间的路径与机器人臂的运动学奇点相交,并且不利用该路径来执行机器人臂的移动,确定在开始位置与结束位置之间的路径在与机器人臂的运动学奇点相距某一预定阈值距离之外通过,并且使用笛卡尔轨迹生成方案来移动机器人臂,以及确定在开始位置与结束位置之间的路径在与机器人臂的运动学奇点相距的预定阈值距离之内通过,确定与开始位置对应的夹角和与结束位置对应的夹角,以及根据关节坐标来计算开始位置和结束位置,至少部分地基于夹角来计算径向坐标中参考点的轨迹,计算末端执行器上的参考点的对应角度坐标,使得参考点遵循笛卡尔空间中的在移动的开始位置与结束位置之间的路径。
技术特征:
1.一种方法,包括:
2.根据权利要求1所述的方法,还包括确定所述第一位置和所述不同的第二位置之间的所述所需路径与所述机器人臂的运动学奇点相交。
3.根据权利要求1所述的方法,还包括:
4.根据权利要求1所述的方法,还包括在所选择的网格点中对轨迹进行评估以确定所述轨迹是否违反了用笛卡尔坐标表示的至少一个运动约束。
5.根据权利要求4所述的方法,其中,所述至少一个运动约束包括所述末端执行器的最大线速度和最大加速度。
6.根据权利要求4所述的方法,其中,当确定将违反所述至少一个运动约束时,所述方法还包括:计算时间缩放因子,所述时间缩放因子用于移动所述马达中的至少一个马达并且使所述机器人臂的移动慢下来以满足所述至少一个运动约束。
7.根据权利要求1所述的方法,还包括在用于所述末端执行器的归一化路径变量中计算一维轨迹轮廓,并且将所述一维轨迹轮廓应用于所述所需路径,所述所需路径是根据从在所述末端执行器上的所述参考点的第一位置到所述参考点的不同的第二位置的夹角表示的。
8.一种非暂时性程序存储设备,其可由机器读取,从而有形地体现了可由机器执行的用于执行操作的指令的程序,所述操作包括根据权利要求1所述的方法。
9.一种方法,包括:
10.根据权利要求9所述的方法,其中,所述第二移动控制模式还包括在所选择的网格点中对轨迹进行评估以确定所述轨迹是否违反了用笛卡尔坐标表示的至少一个运动约束。
11.根据权利要求10所述的方法,其中,所述至少一个运动约束包括所述参考点的最大线速度和最大加速度。
12.根据权利要求10所述的方法,其中,当确定将违反所述至少一个运动约束时,所述方法还包括:计算时间缩放因子,所述时间缩放因子用于移动所述马达中的至少一个马达并且使所述机器人臂的移动慢下来以满足所述至少一个运动约束。
13.根据权利要求9所述的方法,其中,多种不同的移动控制模式包括:
14.一种非暂时性程序存储设备,其可由机器读取,从而有形地体现了可由机器执行的用于执行操作的指令的程序,所述操作包括根据权利要求9所述的方法。
15.一种装置,包括:
16.根据权利要求15所述的装置,其中,对于所述第二移动控制模式,所述至少一个处理器和计算机程序代码被配置为在所选择的网格点中对轨迹进行评估以确定所述轨迹是否违反了用笛卡尔坐标表示的至少一个运动约束。
17.根据权利要求16所述的装置,其中,所述至少一个运动约束包括所述参考点的最大线速度和最大加速度。
18.根据权利要求16所述的装置,其中,当确定将违反所述至少一个运动约束时,所述至少一个处理器和计算机程序代码被配置为计算时间缩放因子,所述时间缩放因子用于移动所述马达中的至少一个马达并且使所述机器人臂的移动慢下来以满足所述至少一个运动约束。
19.根据权利要求15所述的装置,其中,多种不同的移动控制模式包括不同的第三移动控制模式,其基于确定所述第一位置和所述不同的第二位置之间的路径与所述机器人臂的运动学奇点相交,并且所述装置被配置为使得不同的第三移动控制模式包括不执行所述机器人臂沿所述路径的移动。
20.根据权利要求15所述的装置,其中,不同的第二移动控制模式包括使用关节空间轨迹生成方案,其中,关节空间轨迹是根据包括夹角被表示的。
21.一种方法,包括:
22.一种机器人,包括:
23.一种机器人,包括:
24.根据权利要求23所述的机器人,其中,所述至少一个第一致动器包括被配置为分别移动所述第一组前臂中的第一前臂和所述第一组前臂中的第二前臂的两个致动器。
25.根据权利要求24所述的机器人,还包括将所述两个致动器与所述第一前臂和所述第二前臂连接的至少两组带轮和皮带。
26.根据权利要求23所述的机器人,其中,所述至少一个第一致动器包括单个致动器,所述单个致动器被配置为分别移动所述第一组前臂中的第一前臂和所述第一组前臂中的第二前臂。
27.根据权利要求26所述的机器人,还包括至少一组带轮和将所述单个致动器与所述第一前臂和所述第二前臂连接的皮带。
28.根据权利要求23所述的机器人,其中,所述至少一个第一致动器包括分别直接连接到所述第一组前臂中的第一前臂和所述第一组前臂中的第二前臂的两个致动器,用于使所述第一前臂和第二前臂在所述第一上臂上旋转。
29.一种机器人,包括:
30.根据权利要求29所述的机器人,其中,所述至少一个第一致动器包括被配置为分别移动所述第一前臂和第二前臂的两个致动器。
31.根据权利要求30所述的机器人,还包括将所述两个致动器与所述第一前臂和第二前臂连接的至少两组带轮和皮带。
32.根据权利要求29所述的机器人,其中,所述至少一个第一致动器包括被配置为移动所述第一前臂和第二前臂的单个致动器。
33.根据权利要求32所述的机器人,还包括至少一组带轮和将所述单个致动器与所述第一前臂和第二前臂连接的皮带。
34.根据权利要求29所述的机器人,其中,所述至少一个第一致动器包括分别直接连接到所述第一前臂和所述第二前臂的两个致动器,用于使所述第一前臂和第二前臂在所述第一上臂上旋转。
技术总结
一种装置包括:机器人驱动器,该机器人驱动器具有马达和被连接至马达的同轴驱动轴;以及机器人臂,该机器人臂被连接至机器人驱动器。机器人臂包括两个上臂、被连接至上臂中的第一上臂的第一组前臂、被连接至上臂中的第二上臂的第二组前臂和被连接至前臂中的相应前臂的末端执行器。第一上臂和第二上臂被连接至同轴驱动轴中的相应第一同轴驱动轴和第二同轴驱动轴。第一组前臂被安装在所述第一上臂上并且通过相应的第一传动带组件和第二传动带组件被连接至所述同轴驱动轴中的第三同轴驱动轴。第二组前臂被安装至所述第二上臂并且通过相应的第三传动带组件和第四传动带组件被连接至所述同轴驱动轴中的第四同轴驱动轴。
技术研发人员:M·霍塞克,S·威尔卡斯,J·里普康
受保护的技术使用者:柿子技术公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!