基于非对称立体辅助定位模块的机器人视觉快速对位方法
本发明属于机器人视觉处理,具体地说,是涉及一种基于非对称立体辅助定位模块的机器人视觉快速对位方法。
背景技术:
1、随着科技的发展,机器人视觉引导技术越来越多的应用到生产生活中,特别是机器人视觉伺服中。但无论是基于图像的视觉伺服(ibvs)还是基于位置的视觉伺服(pbvs)均对目标物体的图像检测具有较高要求,而在实际工作过程中,由于目标物体自身纹理不清晰、光照不足或过度曝光、目标物体与环境对比度不明显等问题的影响,可能造成图像纹理检测缺失、特征丢失等问题,从而使机器人无法精确对位目标。并且,传统的视觉引导需要在每次使用前对相机进行标定。在实际工作中,由于震动、碰撞等原因会导致相机轻微位移,这意味着每次在使用机器人视觉引导时,都需重新标定。
技术实现思路
1、本发明的目的在于提供一种基于非对称立体辅助定位模块的机器人视觉快速对位方法,主要解决传统机器人视觉引导技术中特征纹理检测缺失及需要重复标定等问题。
2、为实现上述目的,本发明采用的技术方案如下:
3、一种基于非对称立体辅助定位模块的机器人视觉快速对位方法,包括以下步骤:
4、s1,模块安装,将具有不同颜色立体块的辅助定位模块安装于无纹理、透明或纹理不清晰的对位目标附近;
5、s2,人工示教,手动调整机器人的机械臂位姿,使辅助定位模块与目标同时处于相机视界内,采集源图像g0;
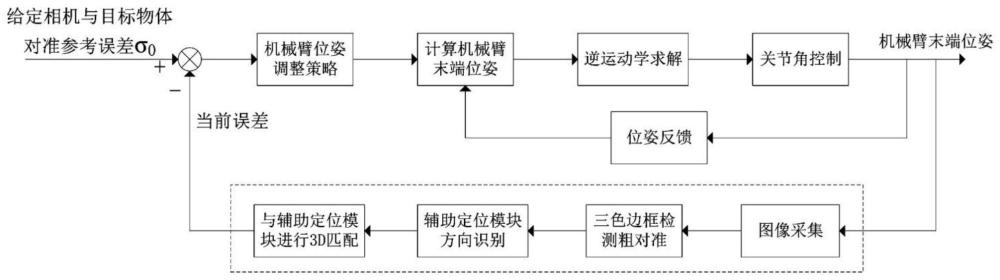
6、s3,自动快速对准,根据预先储存的辅助定位源图像g0,通过视觉自动引导将相机视图中的辅助定位模块调整到相应姿态,实现对位目标的精确定位;
7、s4,误差检测,根据获得的目标物体位姿计算误差,若误差小于设定误差,则表示对准成功。
8、进一步地,在本发明中,所述辅助定位模块为非对称立体形状的可拆卸辅助定位模块,包括三色立体快速对准边框、立体精对准模块、方向识别模块;
9、所述三色立体快速对准边框由黄黑红三色立方体组成,截面为梯形,用于快速定位;
10、所述立体精对准模块,位于三色立体快速对准边框围成的矩形方框内的左上角,由5个相同尺寸顶部为黑色、侧面为红色组成的梯形构成阵列,用于引导机器人进行精对准并计算;
11、所述方向识别模块,由顶部为黑色、侧面为红色的l形立方体组成,其截面为梯形,用于识别对准位姿,且方向识别模块顶部黑色平面周面比为γ。
12、进一步地,在所述步骤s2中,人工示教的具体步骤为:
13、s21,安装好辅助定位模块,手动调整机械臂位姿,使辅助定位模块与对位目标同时处于相机视界内;且在调整时,利用霍夫直线检测,检测三色立体边框,将边框直线表达为ρi=xisinθ+yicosθ,因此,三色边界框的的四条分界线分别距坐标系原点的距离为ρ1、ρ2、ρ3、ρ4;由此,可得每种颜色边框的宽度为l1=|ρ1-ρ2|、l2=|ρ2-ρ3|、l3=|ρ3-ρ4|,实时判断l1=l2=l3是否成立;若成立,则完成三色边框示教;反之,则继续调整机械臂姿态;
14、s22,利用霍夫变换拟合出方向识别模块,并检测方向识别模块的两条l边是否垂直于其指向坐标轴;若不垂直,则再旋转相机视角,直至两条l边垂直于其指向坐标轴;
15、s23,检校此时方向识别模块的顶部黑色区域周面比是否等于γ,若相等,则获取此时的相机图像为源图像,并记为g0。
16、进一步地,在所述步骤s3中,实现对位目标的快速定位的具体步骤为:
17、s31a,将相机调整到任意位置,使相机能完整检测三色立体快速对准边框;相机检测到三色立体边框后,计算三色立体边框在2d视图中的宽度;
18、s31b,当相机检测到三色立体边框有缺失时,通过视觉引导调整机械臂位姿向颜色缺失方向移动,直至相机完全检测出三色边框完整;
19、s31c,检测到三色边框完整的,利用霍夫直线检测,可以将直线表达为ρi=xisinθ+yicosθ;因此,三色边界框的的四条分界线分别距,坐标系原点的距离为ρ1、ρ2、ρ3、ρ4;由此,可得每种颜色边框的宽度为l1=|ρ1-ρ2|、l2=|ρ2-ρ3|、l3=|ρ3-ρ4|;当l1=l2=l3时,即完成相机与对位目标的粗对准。
20、进一步地,在所述步骤s3中粗对准的基础上,实现对位目标的精确定位的具体步骤为:
21、s32a,完成粗对准后,对使用源图像g0和此时相机图像g1中的方向识别模块及立体精对准模块进行方向识别和3d点云匹配,确认相机图像与源图像上的对应角点;
22、s32b,使用点云对立体的精对准模块进行重建,采集立体的精对准模块上5个立体梯形的角点边缘,与源图像的点云模型进行进行3d匹配,求得此时的采集的目标图像与源图像的位姿差;
23、s32c,利用所求得的位姿差逆解转换矩阵,调整相机位姿,使相机图像中的立体精对准模块的位姿与源图像的立体精对准模块位姿相同;
24、s32c,求得方向识别模块的顶部黑色区域的周长c和面积s,计算周面比γ=s/c;当相机图像周面比γ1与源图像周面比γ0值相等时,则精对准完成;若不相等,则重复步骤s32b和步骤s32c。
25、与现有技术相比,本发明具有以下有益效果:
26、本发明利用非对称立体形状的可拆卸辅助定位模块,通过手动示教方式采集标准源图像。以源图像中辅助定位模块的姿态为标准,经过粗对准和精对准对作业目标进行自动快速定位。本发明省略了视觉引导中需要标定的步骤,并且通过边框色彩宽度反馈及周面比检校,提高定位速度和精度。
技术特征:
1.一种基于非对称立体辅助定位模块的机器人视觉快速对位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于非对称立体辅助定位模块的机器人视觉快速对位方法,其特征在于,所述辅助定位模块为非对称立体形状的可拆卸辅助定位模块,包括三色立体快速对准边框、立体精对准模块、方向识别模块;
3.根据权利要求2所述的基于非对称立体辅助定位模块的机器人视觉快速对位方法,其特征在于,在所述步骤s2中,人工示教的具体步骤为:
4.根据权利要求3所述的基于非对称立体辅助定位模块的机器人视觉快速对位方法,其特征在于,在所述步骤s3中,实现对位目标的快速定位的具体步骤为:
5.根据权利要求4所述的基于非对称立体辅助定位模块的机器人视觉快速对位方法,其特征在于,在所述步骤s3中粗对准的基础上,实现对位目标的精确定位的具体步骤为:
技术总结
本发明公开了一种基于非对称立体辅助定位模块的机器人视觉快速对位方法,包括以下步骤:S1,模块安装,将具有不同颜色立体块的辅助定位模块安装于无纹理、透明或纹理不清晰的对位目标附近;S2,人工示教,手动调整机器人的机械臂位姿,使辅助定位模块与目标同时处于相机视界内,采集源图像g<subgt;0</subgt;;S3,自动快速对准,根据预先储存的辅助定位源图像g<subgt;0</subgt;,通过视觉自动引导将相机视图中的辅助定位模块调整到相应姿态,实现对位目标的精确定位;S4,误差检测,根据获得的目标物体位姿计算误差,若误差小于设定误差,则表示对准成功。本发明省略了视觉引导中需要标定的步骤,并且通过边框色彩宽度反馈及周面比检校,提高定位速度和精度。
技术研发人员:邢尧,张静,赵皓,赵佳,张华,王姮,罗洋,何建国,黄仕才,霍建文,徐锋
受保护的技术使用者:西南科技大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!