一种清障机器人
本发明涉及一种清障机器人。
背景技术:
1、目前,市面上没有自动清障的机器人,清障时,需要人手清扫障碍,障碍清扫后,需要再放置在回收篓中,清障效率慢;在清障中,可能会遇到玻璃等较为危险的障碍物,人手清扫时容易产生安全隐患。
技术实现思路
1、本发明的目的是克服现有技术的不足而提供一种清障机器人,全自动清障,清障效率高,不会产生安全隐患,实现了清障全自动化。
2、为了达到上述目的,本发明的技术方案是这样实现的,其是一种清障机
3、器人,其特征在于包括:
4、机架及移动结构;所述机架包括底座及收集篓,所述移动结构安装在机架的底座上从而带动机架移动;
5、收集结构;所述清障结构包括收集传动组件、第一圆筒、第二圆筒、第三圆筒、第四圆筒及收集传感器;所述第一圆筒、第二圆筒、第三圆筒、第四圆筒从下至上转动的安装在机架的收集篓上,第一圆筒的下部与机架底座有间隙从而形成收集篓入口,所述收集传感器安装在收集篓入口处,所述收集传动组件分别与第一圆筒、第二圆筒、第三圆筒及第四圆筒轴连接从而带动第一圆筒、第二圆筒、第三圆筒及第四圆筒转动;以及
6、清障结构;所述清障结构数量是两个,清障结构安装在机架底座的左右两侧,两清障结构包括清障座组件、清障传动组件、清障摆臂、清障支架、清障轮及缓冲气缸,所述清障座组件转动的安装在清障摆臂的一端部,清障摆臂的另一端部安装在清障支架上,所述清障轮转动的安装在清障支架上,所述清障传动组件分别与清障座组件及清障轮连接从而带动清障座组件及清障轮转动,清障轮位于机架底座的收集篓入口处,清障座组件位于清障轮的外侧从而将障碍物扫进收集篓入口中。
7、在本技术方案中,所述收集传动组件包括第一收集电机、第一传动带、第二传动带、第二收集电机、第三传动带及第四传动带;所述第一收集电机及第二收集电机安装在机架的底座上,所述第一收集电机通过第一传动带带动第一圆筒转动,所述第一圆筒通过第四传动带带动第二圆筒转动,所述第二收集电机通过第三传动带带动第三圆筒转动,所述第三圆筒通过第二传动带带动第四圆筒转动。
8、在本技术方案中,还包括弧形支架及弧形压架;所述弧形支架安装在机架并位于收集篓中,弧形支架的下部与机架收集篓入口相通,所述弧形压架安装在弧形支架的上部从而防止收集篓障碍物跌出。
9、在本技术方案中,所述清障座组件包括清障座及清障扫板组;所述清障座转动的安装在清障摆臂的一端部,所述清障扫板组安装在清障座上。
10、在本技术方案中,所述清障传动组件包括清障电机、主动齿轮、清障传动带、清障第一齿轮、清障第二齿轮及清障第三齿轮;所述清障第一齿轮及清障第二齿轮转动的安装在清障支架上并相互啮合,所述主动齿轮与清障电机轴连接,主动齿轮与清障第二齿轮啮合,所述清障第三齿轮与清障轮轴连接,清障第三齿轮与清障第二齿轮啮合,所述清障第一齿轮的转轴通过清障传动带与清障座的转动连接从而带动清障座转动。
11、在本技术方案中,所述移动结构数量是两个,移动结构分别安装在机架底座的左右两侧,移动结构包括移动第一轮、移动第一传动带、移动第一齿轮、移动第二齿轮、移动第三齿轮、移动第二传动带、移动第二轮、移动第一电机、移动第二电机及移动第三电机;所述移动第一电机、移动第二电机及移动第三电机安装在机架底座的侧部,所述移动第一齿轮与移动第一电机轴连接,所述移动第二齿轮与移动第二电机轴连接,所述移动第三齿轮与移动第三电机轴连接,所述移动第一轮及移动第二轮转动的安装在机架底座侧部的前后两侧部,所述移动第二齿轮分别与移动第一齿轮及移动第三齿轮啮合,所述移动第一齿轮通过移动第一传动带带动移动第一轮转动,所述移动第三齿轮通过移动第二传动带带动移动第二轮转动。
12、本发明与现有技术相比的优点为:全自动清障,清障效率高,不会产生安全隐患,实现了清障全自动化。
技术特征:
1.一种清障机器人,其特征在于包括:
2.根据权利要求1所述的清障机器人,其特征在于所述收集传动组件包括第一收集电机(12)、第一传动带(14)、第二传动带(20)、第二收集电机(21)、第三传动带(22)及第四传动带(23);所述第一收集电机(12)及第二收集电机(21)安装在机架(1)的底座上,所述第一收集电机(12)通过第一传动带(14)带动第一圆筒(16)转动,所述第一圆筒(16)通过第四传动带(23)带动第二圆筒(17)转动,所述第二收集电机(21)通过第三传动带(22)带动第三圆筒(18)转动,所述第三圆筒(18)通过第二传动带(20)带动第四圆筒(19)转动。
3.根据权利要求1或2所述的清障机器人,其特征在于还包括弧形支架(15)及弧形压架(24);所述弧形支架(15)安装在机架(1)并位于收集篓中,弧形支架(15)的下部与机架(1)收集篓入口相通,所述弧形压架(24)安装在弧形支架(15)的上部从而防止收集篓障碍物跌出。
4.根据权利要求1所述的清障机器人,其特征在于所述清障座组件包括清障座(26)及清障扫板组(25);所述清障座(26)转动的安装在清障摆臂(28)的一端部,所述清障扫板组(25)安装在清障座(26)上。
5.根据权利要求1或4所述的清障机器人,其特征在于所述清障传动组件包括清障电机(32)、主动齿轮(34)、清障传动带(27)、清障第一齿轮(29)、清障第二齿轮(30)及清障第三齿轮(33);所述清障第一齿轮(29)及清障第二齿轮(30)转动的安装在清障支架(31)上并相互啮合,所述主动齿轮(34)与清障电机(32)轴连接,主动齿轮(34)与清障第二齿轮(30)啮合,所述清障第三齿轮(33)与清障轮(36)轴连接,清障第三齿轮(33)与清障第二齿轮(30)啮合,所述清障第一齿轮(29)的转轴通过清障传动带(27)与清障座(26)的转动连接从而带动清障座(26)转动。
6.根据权利要求1所述的清障机器人,其特征在于所述移动结构数量是两个,移动结构分别安装在机架(1)底座的左右两侧,移动结构包括移动第一轮(2)、移动第一传动带(3)、移动第一齿轮(4)、移动第二齿轮(5)、移动第三齿轮(6)、移动第二传动带(7)、移动第二轮(8)、移动第一电机(9)、移动第二电机(10)及移动第三电机(11);所述移动第一电机(9)、移动第二电机(10)及移动第三电机(11)安装在机架(1)底座的侧部,所述移动第一齿轮(4)与移动第一电机(9)轴连接,所述移动第二齿轮(5)与移动第二电机(10)轴连接,所述移动第三齿轮(6)与移动第三电机(11)轴连接,所述移动第一轮(2)及移动第二轮(8)转动的安装在机架(1)底座侧部的前后两侧部,所述移动第二齿轮(5)分别与移动第一齿轮(4)及移动第三齿轮(6)啮合,所述移动第一齿轮(4)通过移动第一传动带(3)带动移动第一轮(2)转动,所述移动第三齿轮(6)通过移动第二传动带(7)带动移动第二轮(8)转动。
技术总结
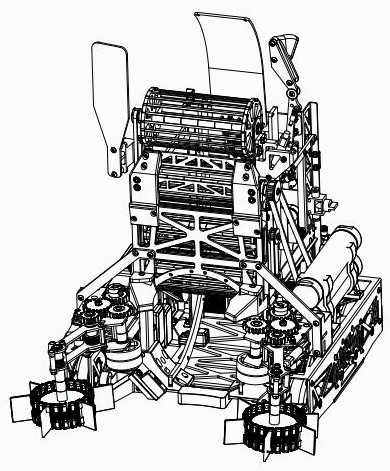
本发明涉及一种清障机器人,包括机架、移动结构、收集结构及清障结构;机架包括底座及收集篓,移动结构安装在机架的底座上从而带动机架移动;清障结构包括收集传动组件、第一至第四圆筒及收集传感器;清障结构数量是两个,清障结构安装在机架底座的左右两侧,两清障结构包括清障座组件、清障传动组件、清障摆臂、清障支架、清障轮及缓冲气缸。其具有全自动清障,清障效率高,不会产生安全隐患,实现了清障全自动化等优点。
技术研发人员:范淇元,冯劲安,罗建成
受保护的技术使用者:顺德职业技术学院
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!