一种可连续回转的单元模块及模块化机器人
本发明涉及一种机器人模块及机器人,具体涉及一种可连续回转的单元模块及模块化机器人。
背景技术:
1、传统固定构型机器人,往往针对某一应用或场景开发,结构较为复杂、构型单一、泛用性差、环境适应性差。而研制多种不同结构形式、作业功能的机器人,由此带来的设计、制造、安装、维护等成本的大幅度增加,极大限制了机器人技术在通用服务中的应用。
2、模块化机器人是由多个模块组成的复杂系统,可扩展性强。通过加入各种不同的功能模块、改变模块数量和配置方式,实现能力的扩展和改变,从而适应复杂多变的工作任务和环境,具有巨大的市场潜力。但目前的研究往往停留在实验室验证阶段,模块集成度高、结构复杂紧凑、可靠性低、维护难、成本高等因素,使其与市场化应用仍有较大差距。
3、cn109514535a涉及外肢体机器人模块单元,两个壳体可以相对转动,但是由于相对旋转范围有限,灵活性较差,运动能力较弱,不能适应复杂多变的工作任务和环境。
技术实现思路
1、本发明为克服现有技术,提供一种可连续回转的单元模块及模块化机器人。该单元模块块具有结构紧凑、易于生产和维护、可靠性高和运动灵活性好的特点,可作为基本单元组成模块化机械臂、机器蛇等各式构型。
2、一种可连续回转的单元模块包含舵机和两个对接模块,每个对接模块包括壳体、连接板和永磁体;壳体为具有开口和内腔的壳体,连接板盖合在壳体的开口处,两个壳体对接在一起,舵机布置在任意一个壳体内腔中并与该壳体连接,舵机输出端上安装的舵盘与另一个壳体连接,且另一个壳体在舵机的带动下能相对其中一个壳体转动,两个壳体之间设置电滑环机构,所述电滑环机构包含可电接触滑动连接的环形滑轨和滑环触点,环形滑轨设置在任意一个壳体上,滑环触点设置在另一个壳体上,两个连接板的连接面上分别设置有可实现关节模块之间连续通讯的电气触点,舵机通过导线分别与电气触点电连接,两个连接板上分别设置有永磁体。
3、进一步地,任意一个连接板上设置有凸出连接面的永磁体,另一个连接板上设置有陷入连接面槽内的永磁体。
4、进一步地,其中一个连接板上设置有可连接通讯的向外延伸的多个弹簧顶针a,另一个连接板上设置有可连接通讯的向内延伸的多个弹簧顶针b,两个连接板上分别还设置有永磁体,舵机通过导线分别与弹簧顶针a和弹簧顶针b电连接。
5、进一步地,所述外壳的材质为铝合金。
6、进一步地,所述外壳由3d打印而成。
7、一种模块化机器人包含多个所述单元模块,相邻两个单元模块通过外凸的永磁体与内陷的永磁体连接。
8、本发明相比现有技术的有益效果是:
9、1、单元模块的外壳进行了减重设计,采用铝合金3d打印制作,重量轻、强度高,大大提高了模块的可靠性,同时又降低了模块的制作难度和成本。
10、2、单元模块中设计了电滑环机构,使模块可以进行连续回转,增强模块的运动能力,提高了灵活性。同时,模块内部线路简洁,易于维护。
11、3、单元模块具有快换性,连接面上有电气触点用于实现模块间的电源总线、通讯等功能,能够随时增加或减少模块数量,实现机器人构型的快速改变。
12、下面结合附图和实施例对本发明的技术方案作进一步地说明:
技术特征:
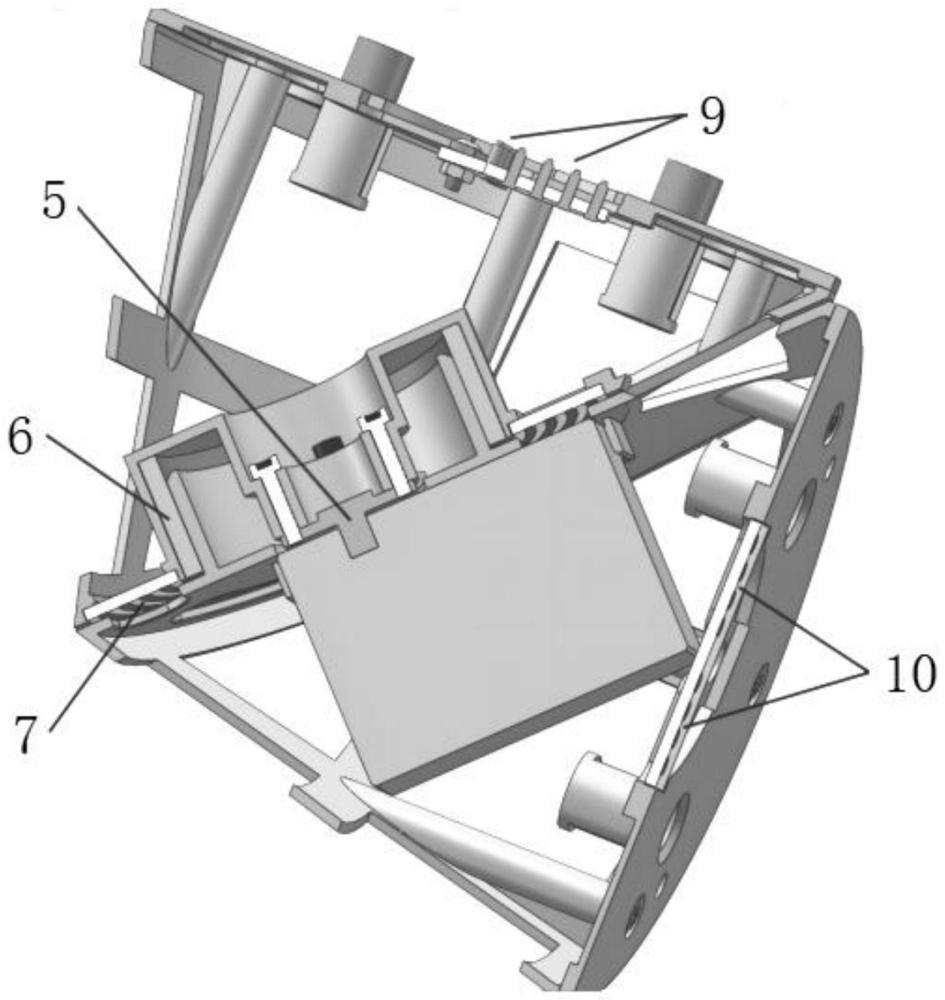
1.一种可连续回转的单元模块,其特征在于:包含舵机(3)和两个对接模块,每个对接模块包括壳体(1)、连接板(2)和永磁体(4);壳体为具有开口和内腔的壳体,连接板盖合在壳体(1)的开口处,两个壳体(1)对接在一起,舵机(3)布置在任意一个壳体(1)内腔中并与该壳体(1)连接,舵机(3)输出端上安装的舵盘(5)与另一个壳体(1)连接,且另一个壳体(1)在舵机(3)的带动下能相对其中一个壳体(1)转动,两个壳体(1)之间设置电滑环机构,所述电滑环机构包含可电接触滑动连接的环形滑轨(7)和滑环触点(8),环形滑轨(7)设置在任意一个壳体上,滑环触点(8)设置在另一个壳体上,两个连接板(2)的连接面上分别设置有可实现关节模块之间连续通讯的电气触点,舵机(3)通过导线分别与电气触点电连接,两个连接板(2)上分别设置有永磁体(4)。
2.根据权利要求1所述一种可连续回转的单元模块,其特征在于:任意一个连接板(2)上设置有凸出连接面的永磁体(4),另一个连接板(2)上设置有陷入连接面槽内的永磁体(4)。
3.根据权利要求1所述一种可连续回转的单元模块,其特征在于:其中一个连接板(2)上设置有可连接通讯的向外延伸的多个弹簧顶针a(9),另一个连接板(2)上设置有可连接通讯的向内延伸的多个弹簧顶针b(10),两个连接板(2)上分别还设置有永磁体(4),舵机(3)通过导线分别与弹簧顶针a(9)和弹簧顶针b(10)电连接。
4.根据权利要求1所述一种可连续回转的单元模块,其特征在于:所述壳体(1)的材质为铝合金。
5.根据权利要求1所述一种可连续回转的单元模块,其特征在于:所述壳体(1)由3d打印而成。
6.根据权利要求1所述一种可连续回转的单元模块,其特征在于:永磁体(4)沿连接板(2)的周向均布设置。
7.根据权利要求1所述一种可连续回转的单元模块,其特征在于:所述壳体(1)由椭圆形壳体或圆柱形壳体斜45度截割而成,两个壳体(1)截割的斜面对接。
8.根据权利要求1所述一种可连续回转的单元模块,其特征在于:环形滑轨(7)和滑环触点(8)的材质为紫铜或黄铜。
9.一种利用权利要求1至8任一项所述可连续回转的单元模块制成的模块化机器人,其特征在于:所述模块化机器人包含多个所述单元模块,相邻两个单元模块通过外凸的永磁体(4)与内陷的永磁体(4)连接。
10.根据权利要求9所述的模块化机器人,其特征在于:所述模块化机器人为蛇形机器人或者机器臂式外肢体机器人。
技术总结
一种可连续回转的单元模块及模块化机器人,所述单元模块包含舵机和两个对接模块,每个对接模块包括壳体、连接板和永磁体;两个壳体之间设置电滑环机构,所述电滑环机构包含可电接触滑动连接的环形滑轨和滑环触点,环形滑轨设置在任意一个壳体上,滑环触点设置在另一个壳体上,两个连接板的连接面上分别设置有可实现关节模块之间连续通讯的电气触点,舵机通过导线分别与电气触点电连接,两个连接板上分别设置有永磁体。本发明可靠性高,增强了模块的运动能力,提高了灵活性。
技术研发人员:朱延河,周楠林,郑天骄,赵思恺,赵杰,王海春
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!