机器人关节的摩擦力辨识方法与流程
本发明涉及机器人,具体涉及一种机器人关节的摩擦力辨识方法。
背景技术:
1、对机器人正确、有效地控制,离不开机器人关节的摩擦力辨识。相关技术中,使用二次多项式,分段拟合摩擦力与角速度、温度的关系曲线,摩擦力计算准确度低。
技术实现思路
1、本发明为解决相关技术中摩擦力计算准确度低的问题,提出了如下技术方案。
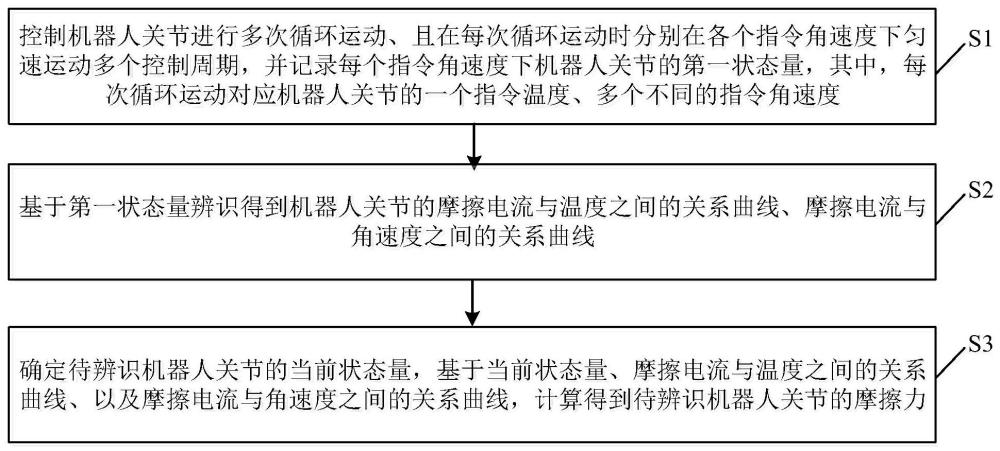
2、本发明第一方面实施例提出了一种机器人关节的摩擦力辨识方法,包括以下步骤:控制机器人关节进行多次循环运动、且在每次循环运动时分别在各个指令角速度下匀速运动多个控制周期,并记录每个所述指令角速度下所述机器人关节的第一状态量,其中,每次循环运动对应所述机器人关节的一个指令温度、多个不同的指令角速度;基于所述第一状态量辨识得到所述机器人关节的摩擦电流与温度之间的关系曲线、摩擦电流与角速度之间的关系曲线;确定待辨识机器人关节的当前状态量,基于所述当前状态量、所述摩擦电流与温度之间的关系曲线、以及所述摩擦电流与角速度之间的关系曲线,计算得到所述待辨识机器人关节的摩擦力。
3、另外,根据本发明上述实施例的机器人关节的摩擦力辨识方法还可以具有如下附加的技术特征。
4、根据本发明的一个实施例,在确定待辨识机器人关节的当前状态量之前,还包括:在所述机器人关节处安装负载后,控制所述机器人关节运动并记录所述机器人关节的第二状态量;基于所述第二状态量辨识得到所述机器人关节的摩擦电流与负载转矩之间的关系曲线。基于所述当前状态量、所述摩擦电流与温度之间的关系曲线、以及所述摩擦电流与角速度之间的关系曲线,计算得到所述待辨识机器人关节的摩擦力,包括:基于所述当前状态量、所述摩擦电流与温度之间的关系曲线、所述摩擦电流与角速度之间的关系曲线以及所述摩擦电流与负载转矩之间的关系曲线,计算得到所述待辨识机器人关节的摩擦力。
5、根据本发明的一个实施例,每次所述循环运动包括多种速度运动模式,多种速度运动模式包括低速运动模式、中速运动模式和高速运动模式,每种所述速度运动模式对应至少一个指令角速度,每种速度运动模式下所述机器人关节正转和/或反转。
6、根据本发明的一个实施例,基于所述第一状态量辨识得到所述机器人关节的摩擦电流与温度之间的关系曲线、摩擦电流与角速度之间的关系曲线,包括:根据每次循环运动时每个所述指令角速度下的所有第一状态量,计算每次循环运动时每个指令角速度下的第一平均状态量;基于所有循环运动时每个指令角速度下的第一平均状态量辨识得到所述机器人关节的摩擦电流与温度之间的关系曲线、摩擦电流与角速度之间的关系曲线。
7、根据本发明的一个实施例,所述第一状态量包括第一实际角速度、第一实际温度和第一实际摩擦电流,所述第一平均状态量包括第一平均角速度、第一平均温度和第一平均摩擦电流,基于所有循环运动时每个指令角速度下的第一平均状态量辨识得到所述机器人关节的摩擦电流与温度之间的关系曲线、摩擦电流与角速度之间的关系曲线,包括:对所有循环运动时每个指令角速度对应的所有第一平均角速度计算平均值,以得到每个指令角速度对应的总体平均角速度;计算每个所述第一平均角速度与所述总体平均角速度之间的差值,以得到所述机器人关节温度引起的摩擦电流变化值;计算每个所述第一平均摩擦电流与所述温度引起的摩擦电流变化值之间的差值,以得到所述机器人关节角速度引起的摩擦电流变化值;根据所述第一平均角速度、所述第一平均温度和所述温度引起的摩擦电流变化值,拟合得到所述机器人关节的摩擦电流与温度之间的关系曲线;基于所述第一平均角速度、所述角速度引起的摩擦电流变化值,拟合得到所述机器人关节的摩擦电流与角速度之间的关系曲线。
8、根据本发明的一个实施例,通过以下公式拟合得到所述机器人关节的摩擦电流与温度之间的关系曲线:
9、
10、其中,frictemp表示温度引起的摩擦电流变化值,v表示第一平均角速度,t表示第一平均温度,ft1、ft2和ft3均为摩擦系数。
11、根据本发明的一个实施例,通过以下公式拟合得到所述机器人关节的摩擦电流与角速度之间的关系曲线:
12、
13、其中,fricvel表示角速度引起的摩擦电流变化值,v表示第一平均角速度,fc、fs、vs、u、fv0、fv1、fv2和fv3均为摩擦系数,其中fs的范围根据所述机器人关节的静摩擦电流确定。
14、根据本发明的一个实施例,通过以下步骤确定所述机器人关节的静摩擦电流:确定所述机器人关节分别在多个不同指令角度处的正向静摩擦电流、反向静摩擦电流;根据所述机器人关节在所有指令角度处的正向静摩擦电流计算所述机器人关节的正向静摩擦电流,并根据所述机器人关节在所有指令角度处的反向静摩擦电流计算所述机器人关节的反向静摩擦电流。
15、根据本发明的一个实施例,确定所述机器人关节分别在多个不同指令角度处的正向静摩擦电流、反向静摩擦电流,包括:在每个指令角度处,分别在多个控制周期内下发第一指令电流,以对所述机器人关节进行控制,并采样每个控制周期内的第二实际角速度,在连续多个控制周期内的第二实际角速度均在第一预设角速度以上时,记录所述连续多个控制周期内的第一个第一指令电流,并将其作为该指令角度处的正向静摩擦电流,其中,每个所述指令角度处对应的所有控制周期内的第一指令电流依次递增;在每个指令角度处,分别在多个控制周期内下发第二指令电流,以对所述机器人关节进行控制,并采样每个控制周期内的第三实际角速度,在连续多个控制周期内的第三实际角速度均在第二预设角速度以下时,记录所述连续多个控制周期内的第一个第二指令电流,并将其作为该指令角度处的反向静摩擦电流,其中,每个所述指令角度处对应的所有控制周期内的第二指令电流依次递减。
16、根据本发明的一个实施例,根据所述机器人关节在所有指令角度处的正向静摩擦电流计算所述机器人关节的正向静摩擦电流,并根据所述机器人关节在所有指令角度处的反向静摩擦电流计算所述机器人关节的反向静摩擦电流,包括:计算所述机器人关节在所有所述指令角度处的正向静摩擦电流的平均值,以得到所述机器人关节的正向静摩擦电流;计算所述机器人关节在所有所述指令角度处的反向静摩擦电流的平均值,以得到所述机器人关节的反向静摩擦电流。
17、根据本发明的一个实施例,控制所述机器人关节运动并记录所述机器人关节的第二状态量,包括:控制所述机器人关节从0度角度匀速正转一圈,并记录正转一圈后所述机器人关节的正向状态量;控制所述机器人关节从0度角度匀速反转一圈,并记录反转一圈后所述机器人关节的反向状态量。
18、根据本发明的一个实施例,基于所述第二状态量辨识得到所述机器人关节的摩擦电流与负载转矩之间的关系曲线,包括:确定所述机器人关节所需的负载转矩,其中,所述负载转矩使所述机器人关节在静止状态时所承受的扭矩达到所述机器人关节的平均负载转矩允许最大值;根据所述正向状态量、所述反向状态量和所述负载转矩拟合得到所述机器人关节的摩擦电流与负载转矩之间的关系曲线。
19、根据本发明的一个实施例,所述正向状态量包括正向实际摩擦电流,所述反向状态量包括反向实际摩擦电流,根据所述正向状态量、所述反向状态量和所述负载转矩拟合得到所述机器人关节的摩擦电流与负载转矩之间的关系曲线,包括:计算所述正向实际摩擦电流和所述反向实际摩擦电流的平均值,以得到负载转矩引起的摩擦电流变化值;根据所述负载转矩、所述负载转矩引起的摩擦电流变化值拟合得到所述机器人关节的摩擦电流与负载转矩之间的关系曲线。
20、根据本发明的一个实施例,通过以下公式拟合得到所述机器人关节的摩擦电流与负载转矩之间的关系曲线:
21、fricload=c1*load2+c2*load
22、其中,fricload表示负载转矩引起的摩擦电流变化值,load表示负载转矩,c1、c2均为摩擦系数。
23、根据本发明的一个实施例,所述循环运动的次数根据所述机器人关节所在的室温、预设温差以及所述机器人关节使用时的最高温度确定。
24、本发明实施例的技术方案,先控制机器人关节进行多次循环运动、且在每次循环运动时分别在各个指令角速度下匀速运动多个控制周期,并记录每个所述指令角速度下所述机器人关节的第一状态量,基于所述第一状态量辨识得到所述机器人关节的摩擦电流与温度之间的关系曲线、摩擦电流与角速度之间的关系曲线,最后,确定待辨识机器人关节的当前状态量,基于所述当前状态量和各个关系曲线,计算得到所述待辨识机器人关节的摩擦力。
25、由此,在考虑机器人关节温度和角速度的同时控制机器人关节匀速运动多个控制周期,而且在考虑转子惯量、负载对摩擦电流的影响的情况下,辨识摩擦电流,能够提高摩擦电流辨识准确度,从而提高了摩擦力辨识准确度。
- 还没有人留言评论。精彩留言会获得点赞!