一种机器人智能控制系统的制作方法
本发明涉及机器人领域,具体为一种机器人智能控制系统。
背景技术:
1、机器人感知系统把机器人各种内部状态信息和环境信息从信号转变为机器人自身或者机器人之间能够理解和应用的数据和信息,除了需要感知与自身工作状态相关的机械量,如位移、速度和力等,视觉感知技术是工业机器人感知的一个重要方面。
2、采用视觉感知技术通常需要大量的计算资源和处理时间,同时需要大量的训练数据进行模型训练和学习,可能需要耗费大量的时间和人力资源,另外,视觉检测是对目标进行远程观测和感知,对光照、背景和遮挡等环境因素敏感,这些因素可能影响视觉感知算法的准确性和鲁棒性,要求较好的环境控制和条件,为此,我们提出一种机器人智能控制系统。
技术实现思路
1、本技术的目的在于提供一种机器人智能控制系统,可有效解决上述背景技术中提出的问题。
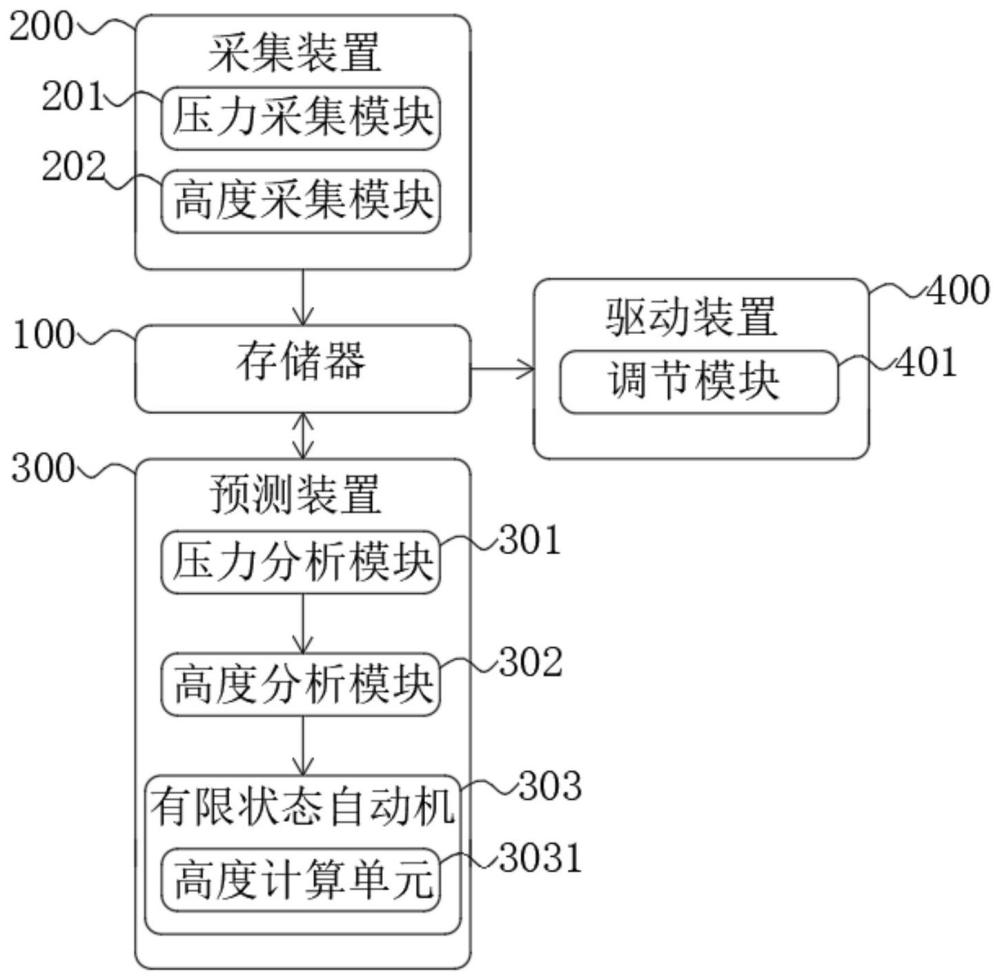
2、为实现上述目的,本发明采取的技术方案为:一种机器人智能控制系统,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
3、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
4、预测装置:包括
5、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
6、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
7、有限状态自动机,内置状态转换表,对支脚的状态进行判断,生成支脚调校指令;
8、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
9、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态转换表中的平衡状态。
10、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
11、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
12、预测装置:包括
13、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
14、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
15、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
16、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
17、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
18、使用排序算法对支脚高度数据进行排序。
19、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
20、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
21、预测装置:包括
22、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
23、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
24、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
25、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
26、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
27、使用排序算法对支脚高度数据进行排序;
28、使用循环结构遍历支脚高度数组,计算相邻数据的差值并存储到支脚高度差数组中。
29、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
30、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
31、预测装置:包括
32、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
33、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
34、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
35、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
36、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
37、使用排序算法对支脚高度数据进行排序;
38、使用循环结构遍历支脚高度数组,计算相邻数据的差值并存储到支脚高度差数组中;
39、使用遍历或滑动窗口、动态规划等算法找到支脚高度差数组中的最大差值,从差值最大的一组数据中筛除与临近高度阈值最接近的一个数据,并在差值最大的一组数据中将其筛除。
40、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
41、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
42、预测装置:包括
43、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
44、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
45、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
46、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
47、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
48、使用排序算法对支脚高度数据进行排序;
49、使用循环结构遍历支脚高度数组,计算相邻数据的差值并存储到支脚高度差数组中;
50、使用遍历或滑动窗口、动态规划等算法找到支脚高度差数组中的最大差值,从差值最大的一组数据中筛除与临近高度阈值最接近的一个数据,并在差值最大的一组数据中将其筛除;
51、所述对支脚的状态进行判断:
52、若支脚高度差达到高度差阈值,同时支脚压力达到压力阈值,则判断机器人状态为平衡状态;
53、若支脚高度差达到高度差阈值,其中存在支脚压力未达到压力阈值,则判断机器人为支脚悬空状态;
54、若支脚高度差未达到高度差阈值,同时支脚压力达到压力阈值,则判断机器人为倾斜状态。
55、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
56、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
57、预测装置:包括
58、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
59、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
60、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
61、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
62、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
63、使用排序算法对支脚高度数据进行排序;
64、使用循环结构遍历支脚高度数组,计算相邻数据的差值并存储到支脚高度差数组中;
65、使用遍历或滑动窗口、动态规划等算法找到支脚高度差数组中的最大差值,从差值最大的一组数据中筛除与临近高度阈值最接近的一个数据,并在差值最大的一组数据中将其筛除;
66、所述对支脚的状态进行判断:
67、若支脚高度差达到高度差阈值,同时支脚压力达到压力阈值,则判断机器人状态为平衡状态;
68、若支脚高度差达到高度差阈值,其中存在支脚压力未达到压力阈值,则判断机器人为支脚悬空状态;
69、若支脚高度差未达到高度差阈值,同时支脚压力达到压力阈值,则判断机器人为倾斜状态;
70、所述采集装置包括压力采集模块,用于实时采集支脚压力,还包括高度采集模块,实现对k时刻支脚高度的采集。
71、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
72、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
73、预测装置:包括
74、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
75、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
76、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
77、使用排序算法对支脚高度数据进行排序;
78、使用循环结构遍历支脚高度数组,计算相邻数据的差值并存储到支脚高度差数组中;
79、使用遍历或滑动窗口、动态规划等算法找到支脚高度差数组中的最大差值,从差值最大的一组数据中筛除与临近高度阈值最接近的一个数据,并在差值最大的一组数据中将其筛除;
80、所述对支脚的状态进行判断:
81、若支脚高度差达到高度差阈值,同时支脚压力达到压力阈值,则判断机器人状态为平衡状态;
82、若支脚高度差达到高度差阈值,其中存在支脚压力未达到压力阈值,则判断机器人为支脚悬空状态;
83、若支脚高度差未达到高度差阈值,同时支脚压力达到压力阈值,则判断机器人为倾斜状态;
84、所述采集装置包括压力采集模块,用于实时采集支脚压力,还包括高度采集模块,实现对k时刻支脚高度的采集;
85、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
86、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
87、所述有限状态自动机遵循以下步骤:
88、s21、定义机器人的状态,所述状态包括平衡状态、支脚悬空状态与倾斜状态;
89、s22、定义触发状态变换的事件,所述事件包括支脚高度差达到高度差阈值、支脚高度差未达到高度差阈值、支脚压力达到压力阈值、支脚压力未达到压力阈值;
90、s23、基于所述状态与事件,定义状态转换表:
91、其中行对应于状态,列对应于事件,交叉单元格表示从当前状态经过该事件触发的状态转换,包括:
92、支脚悬空状态,生成调校指令;
93、倾斜状态,调用高度计算单元,计算支脚高度差,生成调校指令;
94、s24、确定机器人的初始状态,所述初始状态为平衡状态;
95、s25、监测事件的发生情况,所述事件发生情况包括支脚高度差和支脚压力的变化;
96、s26、根据当前事件,在状态转换表中查找对应状态单元格进行状态转换;
97、s27、循环执行步骤s25、s26,直到机器人完成运行或达到初始状态。
98、优选的,包括内部存储有压力阈值、高度阈值、高度差阈值的存储器,还包括
99、采集装置:实现对当前时刻机器人n个支脚的高度采集以及n个支脚所受的压力采集;
100、预测装置:包括
101、压力分析模块,将所采集的n个支脚所受压力与压力阈值进行比对;
102、高度分析模块,将所采集的n个支脚高度进行比对,以支脚高度进行排序构成支脚高度数组,以数组中两个相邻的数据生成支脚高度差,并构成支脚高度差数组,筛分其中支脚高度差最大的一组数据,从中筛除最为临近高度阈值的其一数据,映射另一支脚;
103、有限状态自动机,内置状态转换表,对支脚的状态进行循环判断,生成支脚调校指令;
104、高度计算单元,基于所映射的支脚结合高度阈值生成调校指令;
105、驱动装置:根据调校指令对机器人支脚进行调校,直至机器人达到所述状态集合中的平衡状态;
106、所述驱动装置包括用于调节机器人支脚高度的调节模块,调节模块在接受调校指令后进行驱动,实现对支脚高度的调节。
107、与现有技术相比,本发明提供了一种机器人智能控制系统,具备以下有益效果:
108、该一种机器人智能控制系统,通过设置的预测装置,是基于有限状态自动机对机器人的支脚进行自动感应调节,可以实时监测机器人所站立的地面情况,根据外部环境的变化进行支脚调节,从而增强机器人的稳定性,同时提高机器人在复杂环境中的行走能力,使机器人的支撑力分布更加均匀,减少了机器人站立式的能耗;在工业环境中,通过自动感应调节支脚可以确保机器人在不稳定环境下也能保持稳定,并避免因支脚失去平衡导致的意外事件,提高生产效率、降低故障发生率,并提供更加安全可靠的工作环境;
109、有限状态自动机区别于传统的视觉感知算法,有限状态机在感知压力与高度的前提下,更适用于此类确定性的问题,因是采用直接监测的方式,可以实时获取目标的物理量和状态,对于有限状态自动机的快速决策具有较高的实时性,以此保障调节精度,并且处理时间相对较快。
- 还没有人留言评论。精彩留言会获得点赞!