一种基于类指纹结构与压电传感的触觉感知方法和装置
本发明涉及触觉传感,尤其涉及一种基于类指纹结构与压电传感的触觉感知方法和装置。
背景技术:
1、触觉传感是目前机器人发展的关键技术,而机器手的触觉传感更是在机器抓取,人机交互中起着重要作用。人手是人体部位最敏感的区域之一,指尖作为人手中使用频率最高的部位,是机器人仿生的重要对象。在以往很多研究中,均证实了指尖的指纹结构是提高指尖触觉敏感度的关键要素。指纹结构主要包含指尖皮肤表面的乳头状脊和卷曲结构布局。因此,根据指尖的结构布局完成机器手指的仿生设计,能够大大提高机器人手的触觉敏感度。
2、目前触觉传感的原理包含很多,包括压阻式、压电式、光学式、磁式等,其中压电式仅对动态信号进行响应,且响应速度快。压电传感器的这种特点非常适用于机器人手与被触摸物体之间的动态交互。当前的压电传感器的结构布局,往往是以薄膜矩阵平铺的方式,布局在机械手指表面。这种布局方式具有以下缺点:
3、1)空间分辨率受限于薄膜单元的长宽尺寸,对工艺要求较高;
4、2)平铺方式决定了传感器对于法向按压较为敏感,而对于切向滑移的触觉刺激不敏感;
5、3)矩阵直线的布局方式,使得传感器并非与各个方向均具有相同的敏感度,仅仅只对直线薄膜单元的垂直方向具有较高的敏感度。
6、因此,如何设计新型的结构布局,是机器手指上压电传感器当前亟待解决的问题,以实现法向按压下高分辨率位置感知和切向滑移全方向角度感知的功能。
7、因此,本领域的技术人员致力于开发一种基于类指纹结构与压电传感的触觉感知方法和装置,以克服现有技术存在的问题。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是:目前用到的类指纹结构布局,往往用于放大接触信号,没有考虑到指纹曲线布局在全向感知敏感度方向的用途;目前参考指纹曲线布局的传感布局方式,往往是整个布局用作一个传感单元,没有分段设计进行传感,导致一个仿指纹曲线布局的单元无法实现多个方向角度的识别;以及,目前压电薄膜的布局往往是平铺的方式,对于切向滑移不敏感,并且位置感知的空间分辨率受限于薄膜的长宽大小,对工艺要求较高的问题。
2、为实现上述目的,本发明提供了一种基于类指纹结构与压电传感的触觉感知方法,利用压电触觉手指对不同滑移接触进行位置和方向角度识别,所述方法包括以下步骤:
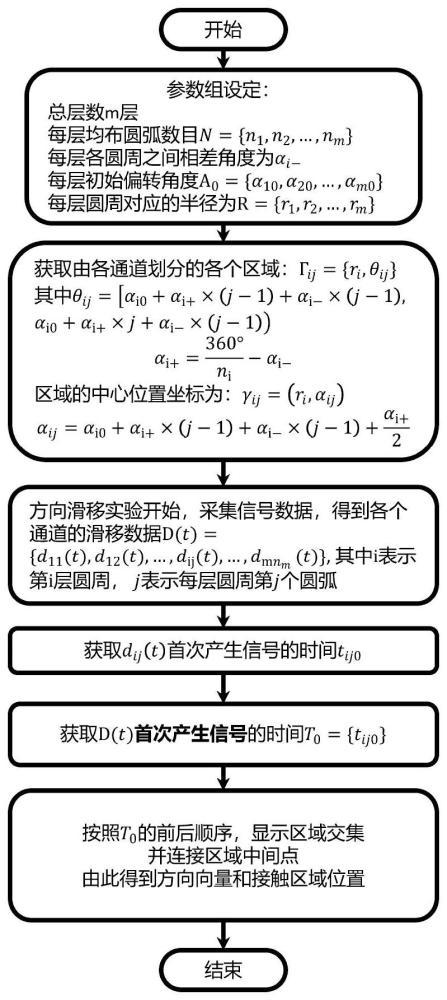
3、步骤1、对参数组进行设定;
4、步骤2、获取由各通道划分的各个区域;
5、步骤3、在开始滑移实验之后,采集各通道原始数据,得到各个通道的滑移数据;
6、步骤4、计算每个通道首次产生信号的时间点,并按照时间点的前后顺序,显示各通道区域发生接触的前后关系,由此得到滑移接触的位置以及滑移方向的方向角度;
7、所述压电触觉手指包括采用类指纹曲线结构的传感器阵列,所述传感器阵列由压电薄膜按照多层圆周分段曲线布局以及立式凸起布局。
8、进一步地,所述压电薄膜自内向外多层同心设置,每层按圆周等间隔均匀排布。
9、进一步地,不同层所述压电薄膜交错排布。
10、进一步地,所述步骤1中所述参数组包括总层数m、每层均布圆弧数目n={n1,n2,...,nm}、每层各圆周之间相差角度αi-、每层初始偏转角度a0={α10,α20,...,αm0}、每层圆周对应的半径r={r1,r2,...,rm}。
11、进一步地,所述步骤2中由各通道划分的各个区域公式表示为γij={ri,θij},其中,各通道占据角度范围θij=[αi0+αi+×(j-1)+αi-×(j-1),αi0+αi+×j+αi-×(j-1)],各通道占据角度范围大小其中,i表示第i层圆周,j表示每层圆周第j个圆弧;区域的中心位置坐标为:γij=(ri,αij),其中,中心位置角度在开始滑移实验之后,采集各通道原始数据,得到各个通道的滑移数据其中,i表示第i层圆周,j表示每层圆周第j个圆弧。
12、进一步地,所述步骤3中各个通道的滑移数据公式表示为其中,i表示第i层圆周,j表示每层圆周第j个圆弧。
13、进一步地,所述步骤4具体包括以下步骤:
14、步骤4.1、获取dij(t)首次产生信号的时间tij0;
15、步骤4.2、获取d(t)首次产生信号的时间t0={tij0};
16、步骤4.3、按照t0的前后顺序,显示区域交集。
17、本发明还提供了一种基于类指纹结构与压电传感的触觉感知装置,包括压电触觉手指,所述压电触觉手指包括触觉手指底座、传感器阵列和信号采集电路,所述触觉手指底座是3d打印的仿手指造型,指尖部位开有凹槽来固定所述传感器阵列,所述传感器阵列包括压电薄膜和圆柱体硅胶,所述压电薄膜插入所述圆柱体硅胶中,其中所述压电薄膜的布置是基于类指纹曲线结构,按照多层圆周分段曲线布局以及立式凸起布局,所述信号采集电路包括多通道的电路板,并与所述触觉手指底座连接固定,所述压电薄膜通过导线与所述电路板的各通道相连接。
18、进一步地,所述压电薄膜自内向外多层同心设置,每层按圆周等间隔均匀排布。
19、进一步地,不同层所述压电薄膜交错排布。
20、本发明的有益效果在于:
21、1、本发明利用类指纹曲线结构实现全向敏感度的触觉感知。将压电薄膜的布局设计为曲线布局,曲线在不同位置具有不同方向的法向量。而对法向量方向施加负载,能达到最大的敏感度。由此,通过单个压电单元,实现切向全方向角度的敏感度。
22、2、本发明基于指纹分段排布方式,分段曲线布局压电薄膜,实现对触觉刺激方向角度的识别,按照分段曲线的方式布局多个压电单元,能够构成多个传感源。由此,利用多个曲线段的压电传感源,解码不同方向角度,实现全方向角度的识别。
23、3、本发明基于指纹乳头状凸脊排布方式,立式布局压电薄膜,提高切向滑移感知的敏感性,同时,能够提高法向按压过程中的空间分辨率,感知不同的位置,仿指纹乳头状凸脊结构,将压电薄膜按照立式微凸起布局。由此,提高切向滑移感知的敏感性,同时,能够提高法向按压过程中的空间分辨率,感知不同的位置。
24、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.一种基于类指纹结构与压电传感的触觉感知方法,其特征在于,利用压电触觉手指对不同滑移接触进行位置和方向角度识别,所述方法包括以下步骤:
2.如权利要求1所述的基于类指纹结构与压电传感的触觉感知方法,其特征在于,所述压电薄膜自内向外多层同心设置,每层按圆周等间隔均匀排布。
3.如权利要求2所述的基于类指纹结构与压电传感的触觉感知方法,其特征在于,不同层所述压电薄膜交错排布。
4.如权利要求3所述的基于类指纹结构与压电传感的触觉感知方法,其特征在于,所述步骤1中所述参数组包括总层数m、每层均布圆弧数目n={n1,n2,...,nm}、每层各圆周之间相差角度αi-、每层初始偏转角度a0={α10,α20,...,αm0}、每层圆周对应的半径r={r1,r2,...,rm}。
5.如权利要求4所述的基于类指纹结构与压电传感的触觉感知方法,其特征在于,所述步骤2中由各通道划分的各个区域公式表示为γij={ri,θij},其中,各通道占据角度范围θij=[αi0+αi+×(j-1)+αi-×(j-1),αi0+αi+×j+αi-×(j-1)],各通道占据角度范围大小其中,i表示第i层圆周,j表示每层圆周第j个圆弧;区域的中心位置坐标为:γij=(ri,αij),其中,中心位置角度在开始滑移实验之后,采集各通道原始数据,得到各个通道的滑移数据其中,i表示第i层圆周,j表示每层圆周第j个圆弧。
6.如权利要求5所述的基于类指纹结构与压电传感的触觉感知方法,其特征在于,所述步骤3中各个通道的滑移数据公式表示为其中,i表示第i层圆周,j表示每层圆周第j个圆弧。
7.如权利要求6所述的基于类指纹结构与压电传感的触觉感知方法,其特征在于,所述步骤4具体包括以下步骤:
8.一种基于类指纹结构与压电传感的触觉感知装置,其特征在于,包括压电触觉手指,所述压电触觉手指包括触觉手指底座、传感器阵列和信号采集电路,所述触觉手指底座是3d打印的仿手指造型,指尖部位开有凹槽来固定所述传感器阵列,所述传感器阵列包括压电薄膜和圆柱体硅胶,所述压电薄膜插入所述圆柱体硅胶中,其中所述压电薄膜的布置是基于类指纹曲线结构,按照多层圆周分段曲线布局以及立式凸起布局,所述信号采集电路包括多通道的电路板,并与所述触觉手指底座连接固定,所述压电薄膜通过导线与所述电路板的各通道相连接。
9.如权利要求8所述的基于类指纹结构与压电传感的触觉感知装置,其特征在于,所述压电薄膜自内向外多层同心设置,每层按圆周等间隔均匀排布。
10.如权利要求9所述的基于类指纹结构与压电传感的触觉感知装置,其特征在于,不同层所述压电薄膜交错排布。
技术总结
本发明公开了一种基于类指纹结构与压电传感的触觉感知方法和装置,利用压电触觉手指对不同滑移接触进行位置和方向角度识别,包括步骤:对参数组进行设定;获取由各通道划分的各个区域;在开始滑移实验之后,采集各通道原始数据,得到各个通道的滑移数据;计算每个通道首次产生信号的时间点,并按照时间点的前后顺序,显示各通道区域发生接触的前后关系,由此得到滑移接触的位置以及滑移方向的方向角度;所述压电触觉手指包括采用类指纹曲线结构的传感器阵列,所述传感器阵列由压电薄膜按照多层圆周分段曲线布局以及立式凸起布局。本发明利用类指纹曲线结构实现全向敏感度的触觉感知,实现全方向角度的识别以及感知不同的位置。
技术研发人员:刘洪海,王小鑫,林晨滨,向桂峣,盛译萱
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!