一种多触手负压柔性夹爪的制作方法
本发明涉及柔性抓取,尤其涉及一种多触手负压柔性夹爪。
背景技术:
1、目前对于物体的抓取或者夹持一般采用的柔性夹爪或者硬质的机械夹爪,由于柔性夹爪可以柔性的夹持物品,在夹持过程中不会对物体表面产生夹痕,并且夹持力比较线性,所以应用非常广泛。
2、而目前的柔性夹爪的形态主要有两种,其中专利号为cn201721042513.4的专利文件中公开了一种新型柔性夹头及其柔性夹具和柔性夹持笔,该柔性夹头公开了一种结构形态的柔性夹爪,可以用于夹持非常小的物体;另外专利号为cn202320785989.6的专利文件中公开了一种加强柔性夹爪,这种柔性夹爪可以增加夹持力,方便夹持一些尺寸比较大的物体。
3、然而这两类柔性夹爪还是具有一定的局限性,这两种柔性夹爪的适应性都比较差,只能夹持一些特定形状或者特定尺寸的物品,同时上述的两个柔性夹头夹持时还需要物品特定的摆放角度,而对于一些形状为异形的物体,或者散乱摆放的物体就很难夹持,对于条状的物体的比如粉丝、面条,上述的夹头就难抓取。
技术实现思路
1、本发明所要解决的技术问题是:提供一种多触手负压柔性夹爪,该负压柔性夹爪能够更好的抓取散乱或者异形物体,适应不同的抓取情况。
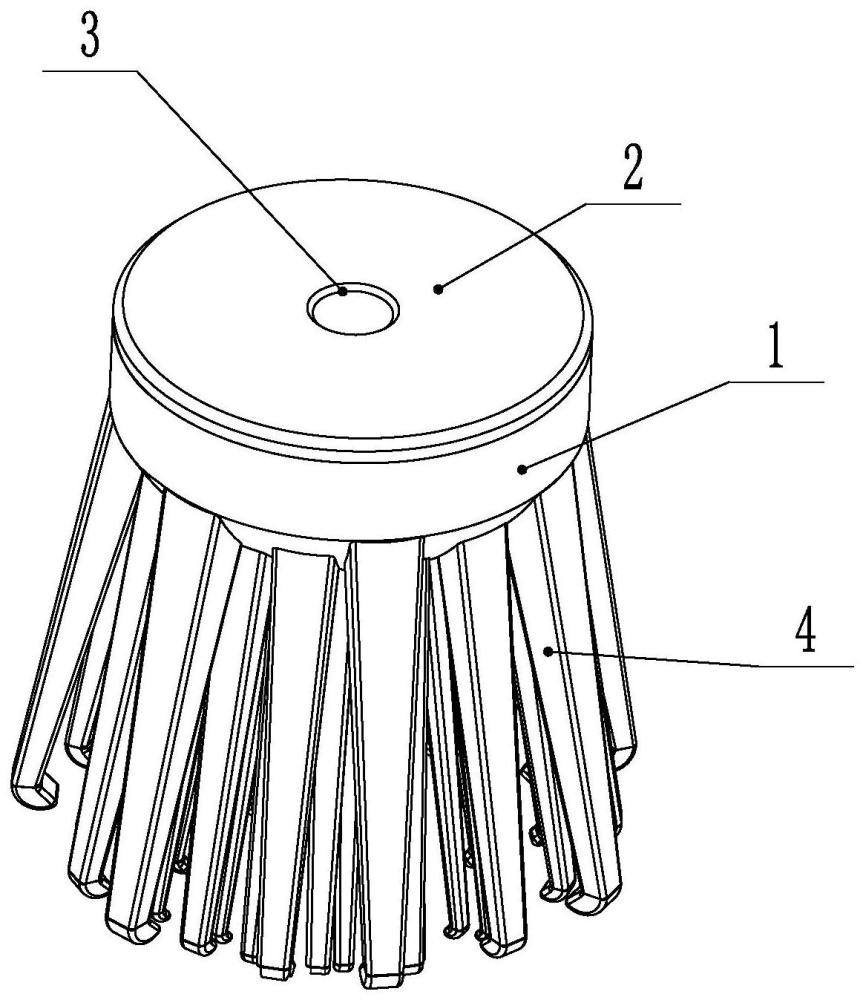
2、为解决上述技术问题,本发明的技术方案是:一种多触手负压柔性夹爪,包括由弹性材料制成连接部,所述连接部上设置有驱动腔室,所述连接部上设置有将所述驱动腔室封堵的上连接板,所述上连接板上设置有与驱动腔室相通的连通孔,所述驱动腔室包括腔底壁和腔侧壁,所述驱动腔室的腔底壁的厚度小于腔侧壁的厚度或者腔底壁的弹性模量小于腔侧壁的弹性模量,所述腔底壁上设置有至少一圈抓取触手,每圈抓取触手均包括间隔设置的若干根抓取杆,最内侧的一圈抓取杆围成了抓取空间。
3、作为一种优选的方案,所述腔底壁的内壁上位于抓取空间的中部还设置有向内凸伸的拉力增强块。
4、作为一种优选的方案,所述拉力增强块的内表面上还设置有若干个张力破坏凹槽。
5、作为一种优选的方案,所述张力破坏凹槽的数量为多个且由中心向四周发散形成中心对称图形。
6、作为一种优选的方案,所述腔底壁为向外侧鼓起的弧形腔底壁。
7、作为一种优选的方案,所述腔底壁上位于抓取空间内的外表面设置成平面。
8、作为一种优选的方案,所述腔底壁的外表面还设置有向驱动腔室内部凹陷的中部凹槽,所述中部凹槽与所述拉力增强块位置对应。
9、作为一种优选的方案,所述抓取触手的圈数为多圈,每圈抓取触手的抓取杆的数量相同,各抓取杆错位布置,外圈的抓取杆比内圈的抓取杆更粗。
10、作为一种优选的方案,所述抓取杆的内部嵌入有加强杆。
11、作为一种优选的方案,所述抓取杆的末端设置有向抓取空间弯折的钩部。
12、采用了上述技术方案后,本发明的效果是:由于一种多触手负压柔性夹爪,包括由弹性材料制成连接部,所述连接部上设置有驱动腔室,所述连接部上设置有将所述驱动腔室封堵的上连接板,所述上连接板上设置有与驱动腔室相通的连通孔,所述驱动腔室包括腔底壁和腔侧壁,所述驱动腔室的腔底壁的厚度小于腔侧壁的厚度或者腔底壁的弹性模量小于腔侧壁的弹性模量,所述腔底壁上设置有至少一圈抓取触手,每圈抓取触手均包括间隔设置的若干根抓取杆,最内侧的一圈抓取杆围成了抓取空间,因此,将该柔性夹爪的连通孔连接在负压管路上,需要抓取时对驱动腔室抽气产生负压,驱动腔室的腔底壁就会收到负压吸力而向腔内拱起变形,腔底壁的变形就会带动外部的抓取杆的末端相互收拢,从而将物体抓取使其处于抓取空间内,该柔性夹爪并不受物体的形状限制,一些形状各异的物体或者条状的物体都可以被多个抓取杆所抓取,因此,该柔性夹爪能够抓取更多不同形状的物体,适应性更强。
13、又由于所述腔底壁的内壁上位于抓取空间的中部还设置有向内凸伸的拉力增强块,该拉力增强块可以增加腔底壁变形时的牵拉力,使腔底壁外部的抓取杆更好的变形,变形角度更大,抓取力也更大。
14、又由于所述拉力增强块的内表面上还设置有若干个张力破坏凹槽。由于拉力增强块向上变形时,对于拉力增强块的内表面而言是会受到扩张拉伸变形,而由于内表面设置了张力破坏凹槽,因此拉力增强块的变形幅度更大,并且也更容易变形,这样就可以在较小真空度的情况就可以使腔底壁变形,从而在较低真空度的情况下抓取杆也能快速响应,实现负压抓取。
15、又由于所述张力破坏凹槽的数量为多个且由中心向四周发散形成中心对称图形,因此,采用该布置形式,可以使拉力增强块的内表面由中心向四周更好的拉伸变形,使各部位的变形量更均匀,这样各抓取杆的变形量更一致。
16、又由于所述腔底壁为向外侧鼓起的弧形腔底壁。所述腔底壁上位于抓取空间内的外表面设置成平面,由于腔底壁位于抓取空间的区域所需要的变形量最大,因此,将该腔底壁上位于抓取空间内的外表面设置成平面可以减少抓取时所需的变形量,这样腔底壁在较小的变形量下就能够快速的带动抓取杆动作。
17、又由于所述腔底壁的外表面还设置有向驱动腔室内部凹陷的中部凹槽,所述中部凹槽与所述拉力增强块位置对应,这样,由于腔底壁在负压变形时对于腔底壁的外表面而言是会受到挤压压缩变形,因此,将设置的中部凹槽可以更好的方便腔底壁外表面的挤压变形,也在抓取时腔底壁的所需的变形量更小。
18、又由于所述抓取触手的圈数为多圈,每圈抓取触手的抓取杆的数量相同,外圈的抓取杆比内圈的抓取杆更粗,这样,抓取杆错位设置可以方便抓取杆更好的收拢,同时外圈的抓取杆更粗,这样可以使外圈的抓取杆变形时提供更大的抓取力。
19、又由于所述抓取杆的内部嵌入有加强杆,该加强杆可以为金属或者塑料或者尼龙材质,可以增加抓取杆的强度,避免抓取时反向变形而影响抓取力。
20、又由于所述抓取杆的末端设置有向抓取空间弯折的钩部,该钩部一方面可以增加抓取杆末端的强度,也方便在抓取时产生一个钩抓的状态,从而适合抓取一些条状的物体,例如抓取粉丝或者面条。
技术特征:
1.一种多触手负压柔性夹爪,包括由弹性材料制成连接部,所述连接部上设置有驱动腔室,所述连接部上设置有将所述驱动腔室封堵的上连接板,所述上连接板上设置有与驱动腔室相通的连通孔,所述驱动腔室包括腔底壁和腔侧壁,所述驱动腔室的腔底壁的厚度小于腔侧壁的厚度或者腔底壁的弹性模量小于腔侧壁的弹性模量,其特征在于:所述腔底壁上设置有至少一圈抓取触手,每圈抓取触手均包括间隔设置的若干根抓取杆,最内侧的一圈抓取杆围成了抓取空间。
2.如权利要求1所述的一种多触手负压柔性夹爪,其特征在于:所述腔底壁的内壁上位于抓取空间的中部还设置有向内凸伸的拉力增强块。
3.如权利要求2所述的一种多触手负压柔性夹爪,其特征在于:所述拉力增强块的内表面上还设置有若干个张力破坏凹槽。
4.如权利要求3所述的一种多触手负压柔性夹爪,其特征在于:所述张力破坏凹槽的数量为多个且由中心向四周发散形成中心对称图形。
5.如权利要求4所述的一种多触手负压柔性夹爪,其特征在于:所述腔底壁为向外侧鼓起的弧形腔底壁。
6.如权利要求5所述的一种多触手负压柔性夹爪,其特征在于:所述腔底壁上位于抓取空间内的外表面设置成平面。
7.如权利要求5所述的一种多触手负压柔性夹爪,其特征在于:所述腔底壁的外表面还设置有向驱动腔室内部凹陷的中部凹槽,所述中部凹槽与所述拉力增强块位置对应。
8.如权利要求6或7所述的一种多触手负压柔性夹爪,其特征在于:所述抓取触手的圈数为多圈,每圈抓取触手的抓取杆的数量相同,各抓取杆错位布置,外圈的抓取杆比内圈的抓取杆更粗。
9.如权利要求8所述的一种多触手负压柔性夹爪,其特征在于:所述抓取杆的内部嵌入有加强杆。
10.如权利要求9所述的一种多触手负压柔性夹爪,其特征在于:所述抓取杆的末端设置有向抓取空间弯折的钩部。
技术总结
本发明公开了一种多触手负压柔性夹爪,包括由弹性材料制成连接部,所述连接部上设置有驱动腔室,所述连接部上设置有将所述驱动腔室封堵的上连接板,所述上连接板上设置有与驱动腔室相通的连通孔,所述驱动腔室包括腔底壁和腔侧壁,所述驱动腔室的腔底壁的厚度小于腔侧壁的厚度或者腔底壁的弹性模量小于腔侧壁的弹性模量,所述腔底壁上设置有至少一圈抓取触手,每圈抓取触手均包括间隔设置的若干根抓取杆,最内侧的一圈抓取杆围成了抓取空间。该负压柔性夹爪能够更好的抓取散乱或者异形物体,适应不同的抓取情况。
技术研发人员:朱紫娴,张帆
受保护的技术使用者:深圳柔触机器人科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!