一种重载多角度抓取的桁架机器人的制作方法
本技术涉及桁架机器人,特别是一种重载多角度抓取的桁架机器人。
背景技术:
1、桁架机器人也叫做直角坐标机器人和龙门式机器人。工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间直角关系、多用途的操作机。其能够搬运物体、操作工具,以完成各种作业,广泛地运用在机械制造、冶金、电子、轻工和原子能等生产车间用以抓取移转物件。
2、如公开号为cn210551179u的一种重载桁架机器人,该桁架机器人通过抓手可以对物品进行抓取,在进行物品抓取时还存在以下不足:该桁架机器人通过抓手对物品抓取时,可以对其下方的物品进行抓取,但是在一些特殊的物品进行抓取时,需要通过物品的侧面进行抓取,上述抓手不便于通过不同的角度进行抓取,因此需要一种重载多角度抓取的桁架机器人来解决上述问题。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种重载多角度抓取的桁架机器人,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
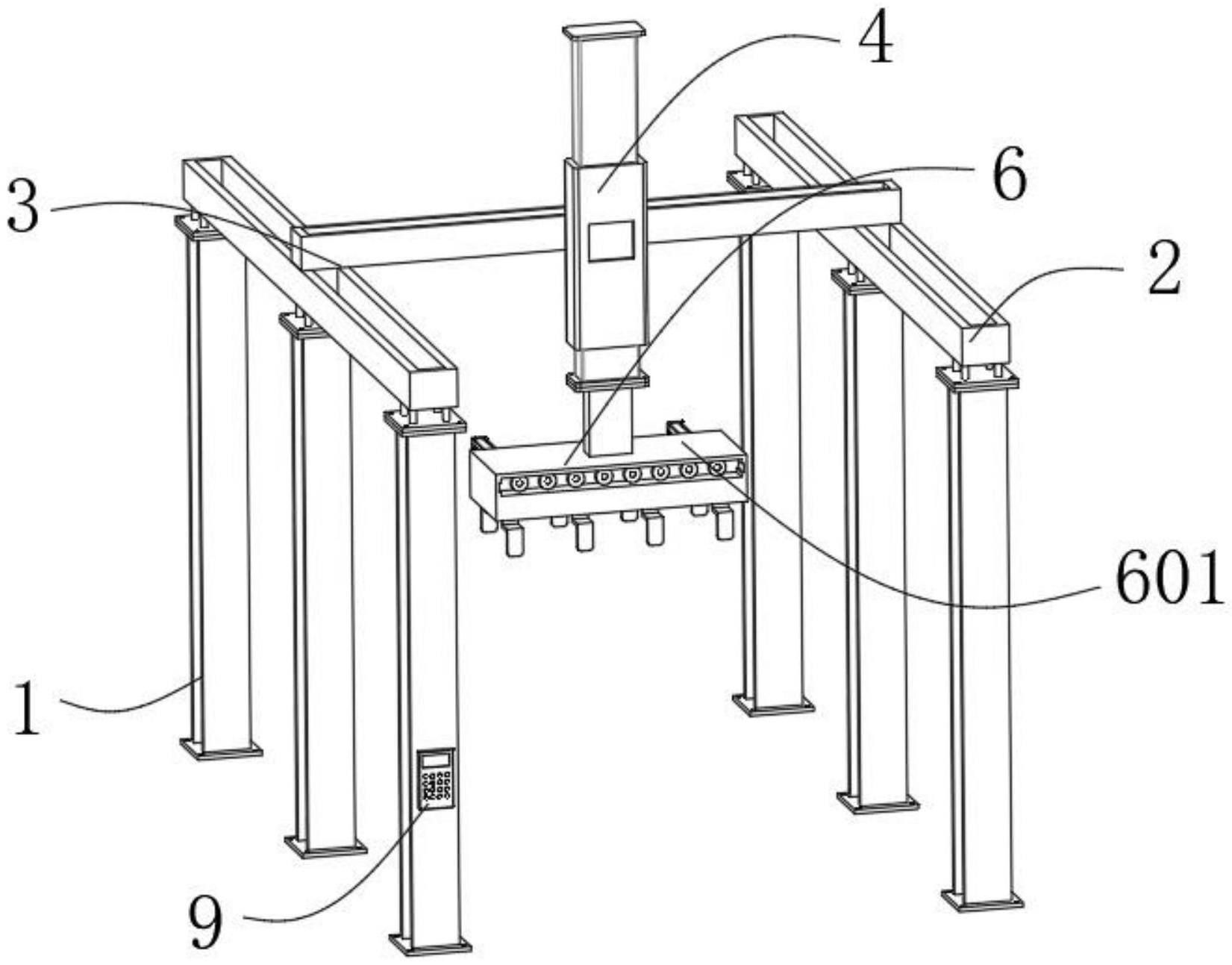
3、为了实现上述目的,本实用新型一方面的实施例提供一种重载多角度抓取的桁架机器人,包括支撑架,所述支撑架的一侧固定连接有第一导轨,所述第一导轨的一侧滑动连接有第二导轨,所述第二导轨的一侧滑动连接有升降机,所述升降机的一侧固定连接有安装板,所述安装板的一侧设置有第一抓取构件,所述第一抓取构件包括抓取框,所述抓取框的一侧固定连接有电机,所述电机的一侧固定连接有丝杆,所述丝杆的一侧螺纹连接有抓取架,所述抓取框的一侧设置有第二抓取构件,所述第二抓取构件包括气缸,所述气缸的一侧固定连接有移动板,所述移动板的一侧固定连接有滑托,所述移动板的一侧固定连接有工业吸盘。
4、由上述任一方案优选的是,所述安装板的一侧开设有安装孔,所述安装孔的数量为若干个,若干个所述安装孔对称分布在安装板的一侧。所述支撑架的一侧固定连接有综合控制箱,所述综合控制箱与电机电性连接,所述电机的轴心与丝杆的轴心相重合,所述丝杆均匀分为两段,两段丝杆的螺纹方向相反。所述抓取框的一侧固定连接有限位柱,所述限位柱的数量为两个,两个所述限位柱对称分布在抓取框的一侧,所述限位柱与抓取架滑动连接,采用上述方案可以达到的技术效果是:当需要对物品的顶面进行抓取时,通过第一导轨、第二导轨和升降机的配合使抓取框运动到物品上方,随后通过综合控制箱开启电机使其带动丝杆进行转动,通过螺纹传动可以带动两个抓取架进行相对运动,可以将物品进行夹取。
5、由上述任一方案优选的是,所述综合控制箱与气缸电性连接,所述气缸的数量为两个,两个所述气缸对称分布在抓取框的一侧。所述工业吸盘的数量为若干个,若干个所述工业吸盘对称分布在移动板的一侧,所述工业吸盘与综合控制箱电性连接。所述抓取框的一侧开设有滑槽,所述滑槽的形状与大小和滑托滑动连接,采用上述方案可以达到的技术效果是:当需要对物品的侧面进行抓取时,控制抓取框运动到物品的侧面,随后开启气缸使其带动移动板进行运动,直至带动工业吸盘与物品的侧面接触,随后开启工业吸盘将物品进行吸附即可,进而可以实现抓手的多角度抓取,可以提高桁架机器人的抓取效率。
6、与现有技术相比,本实用新型所具有的优点和有益效果为:
7、通过支撑架、第一导轨、第二导轨、升降机、第一抓取构件和第二抓取构件之间的配合设置,当需要对物品的顶面进行抓取时,通过第一导轨、第二导轨和升降机的配合使抓取框运动到物品上方,随后通过综合控制箱开启电机使其带动丝杆进行转动,通过螺纹传动可以带动两个抓取架进行相对运动,可以将物品进行夹取,当需要对物品的侧面进行抓取时,控制抓取框运动到物品的侧面,随后开启气缸使其带动移动板进行运动,直至带动工业吸盘与物品的侧面接触,随后开启工业吸盘将物品进行吸附即可,进而可以实现抓手的多角度抓取,可以提高桁架机器人的抓取效率。
技术特征:
1.一种重载多角度抓取的桁架机器人,其特征在于:包括支撑架(1),所述支撑架(1)的一侧固定连接有第一导轨(2),所述第一导轨(2)的一侧滑动连接有第二导轨(3),所述第二导轨(3)的一侧滑动连接有升降机(4),所述升降机(4)的一侧固定连接有安装板(5),所述安装板(5)的一侧设置有第一抓取构件(6),所述第一抓取构件(6)包括抓取框(601),所述抓取框(601)的一侧固定连接有电机(602),所述电机(602)的一侧固定连接有丝杆(603),所述丝杆(603)的一侧螺纹连接有抓取架(604),所述抓取框(601)的一侧设置有第二抓取构件(7),所述第二抓取构件(7)包括气缸(701),所述气缸(701)的一侧固定连接有移动板(702),所述移动板(702)的一侧固定连接有滑托(703),所述移动板(702)的一侧固定连接有工业吸盘(704)。
2.根据权利要求1所述的一种重载多角度抓取的桁架机器人,其特征在于:所述安装板(5)的一侧开设有安装孔(8),所述安装孔(8)的数量为若干个,若干个所述安装孔(8)对称分布在安装板(5)的一侧。
3.根据权利要求2所述的一种重载多角度抓取的桁架机器人,其特征在于:所述支撑架(1)的一侧固定连接有综合控制箱(9),所述综合控制箱(9)与电机(602)电性连接,所述电机(602)的轴心与丝杆(603)的轴心相重合,所述丝杆(603)均匀分为两段,两段丝杆(603)的螺纹方向相反。
4.根据权利要求3所述的一种重载多角度抓取的桁架机器人,其特征在于:所述抓取框(601)的一侧固定连接有限位柱(10),所述限位柱(10)的数量为两个,两个所述限位柱(10)对称分布在抓取框(601)的一侧,所述限位柱(10)与抓取架(604)滑动连接。
5.根据权利要求4所述的一种重载多角度抓取的桁架机器人,其特征在于:所述综合控制箱(9)与气缸(701)电性连接,所述气缸(701)的数量为两个,两个所述气缸(701)对称分布在抓取框(601)的一侧。
6.根据权利要求5所述的一种重载多角度抓取的桁架机器人,其特征在于:所述工业吸盘(704)的数量为若干个,若干个所述工业吸盘(704)对称分布在移动板(702)的一侧,所述工业吸盘(704)与综合控制箱(9)电性连接。
7.根据权利要求6所述的一种重载多角度抓取的桁架机器人,其特征在于:所述抓取框(601)的一侧开设有滑槽(11),所述滑槽(11)的形状与大小和滑托(703)滑动连接。
技术总结
本技术涉及桁架机器人技术领域,特别是一种重载多角度抓取的桁架机器人,所述支撑架的一侧固定连接有第一导轨,所述第一导轨的一侧滑动连接有第二导轨。本技术的优点在于:当需要对物品的顶面进行抓取时,通过第一导轨、第二导轨和升降机的配合使抓取框运动到物品上方,开启电机使其带动丝杆进行转动,通过螺纹传动可以带动两个抓取架进行相对运动,可以将物品进行夹取,当需要对物品的侧面进行抓取时,控制抓取框运动到物品的侧面,随后开启气缸使其带动移动板进行运动,直至带动工业吸盘与物品的侧面接触,随后开启工业吸盘将物品进行吸附即可,进而可以实现抓手的多角度抓取,可以提高桁架机器人的抓取效率。
技术研发人员:黄俊凯,陈燮尧
受保护的技术使用者:广州市第七轴机器人设备有限公司
技术研发日:20230109
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!