一种机器人可调节夹持机构的制作方法
本技术涉及机械加工,特别是涉及一种机器人可调节夹持机构。
背景技术:
1、机器的生产过程是指从原材料(或半成品)制成产品的全部过程。对机器生产而言包括原材料的运输和保存,生产的准备,毛坯的制造,零件的加工和热处理,产品的装配、及调试,油漆和包装等内容。在对轴类零件进行加工过程中,需要将其进行取放操作,目前主要通过机器手进行夹持操作,然而现有的机器手夹持主要为固定结构,不能根据产品进行适应性调整。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种机器人可调节夹持机构。
2、本实用新型通过以下技术方案来实现上述目的:
3、一种机器人可调节夹持机构,包括安装在机械手臂端部的固定支撑机构,所述固定支撑机构下端连接有用于对零件进行夹持的夹持机构,所述夹持机构呈两侧对称设置;
4、所述夹持机构包括连接在所述固定支撑机构上的夹持组件,所述夹持组件下端连接有用于对夹持范围进行调节的调整组件;所述夹持组件包括夹持气缸,所述夹持气缸活动端部连接有滑座,所述调整组件包括连接在所述滑座下端的连杆,所述连杆一侧连接有第一调节气缸,所述连杆下端连接有夹持座,所述夹持座相对面呈v型状,且该v型面上安装有垫板,所述夹持座上端与所述连杆间连接有第二调节气缸。
5、进一步设置:所述固定支撑机构包括底板,所述底板两端连接有立板,所述底板底部设置有滑槽。
6、进一步设置:所述滑槽呈t型,所述滑槽前后对称设置。
7、进一步设置:所述滑座上端设置有与所述滑槽滑动的凸筋,所述夹持气缸前后对称设置有两处,所述夹持气缸固定端固定在所述立板上。
8、进一步设置:所述连杆两端分别与所述滑座、所述夹持座转动连接,所述第一调节气缸两端分别与所述滑座、所述连杆转动连接,所述第二调节气缸两端分别与所述连杆、所述夹持座转动连接。
9、进一步设置:所述垫板为铜板,所述垫板与所述夹持座螺栓连接。
10、与现有技术相比,本实用新型的有益效果如下:
11、通过调整组件的第一调节气缸、第二调节气缸调整伸缩,使相对的夹持座上的v型槽相对应,改变夹持座的高度间距,然后通过两侧夹持组件的夹持气缸伸缩推动滑座相对移动,使夹持座上的垫板对零件进行夹持固定,提高了对零件夹持的使用范围。
技术特征:
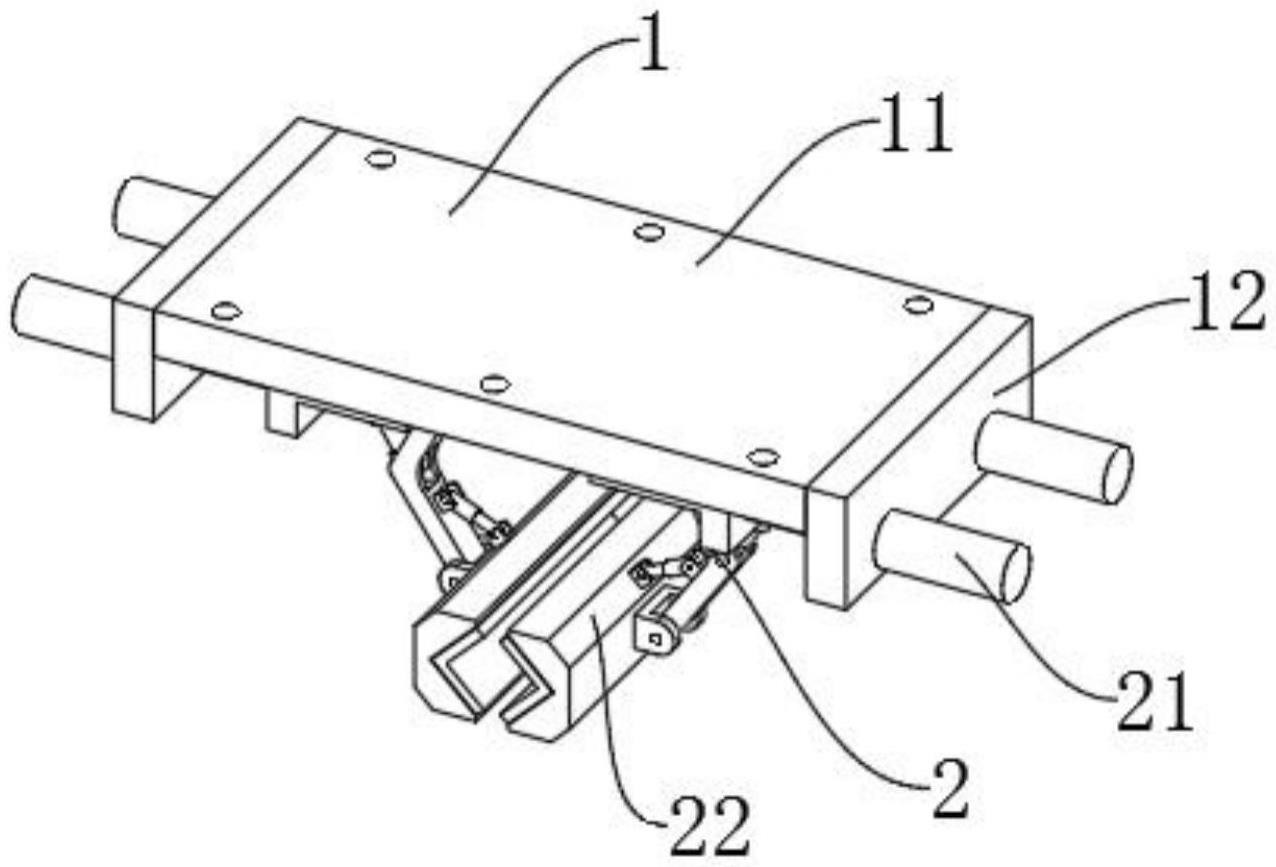
1.一种机器人可调节夹持机构,其特征在于:包括安装在机械手臂端部的固定支撑机构(1),所述固定支撑机构(1)下端连接有用于对零件进行夹持的夹持机构(2),所述夹持机构(2)呈两侧对称设置;
2.根据权利要求1所述的一种机器人可调节夹持机构,其特征在于:所述固定支撑机构(1)包括底板(11),所述底板(11)两端连接有立板(12),所述底板(11)底部设置有滑槽(13)。
3.根据权利要求2所述的一种机器人可调节夹持机构,其特征在于:所述滑槽(13)呈t型,所述滑槽(13)前后对称设置。
4.根据权利要求3所述的一种机器人可调节夹持机构,其特征在于:所述滑座(212)上端设置有与所述滑槽(13)滑动的凸筋,所述夹持气缸(211)前后对称设置有两处,所述夹持气缸(211)固定端固定在所述立板(12)上。
5.根据权利要求1所述的一种机器人可调节夹持机构,其特征在于:所述连杆(221)两端分别与所述滑座(212)、所述夹持座(223)转动连接,所述第一调节气缸(222)两端分别与所述滑座(212)、所述连杆(221)转动连接,所述第二调节气缸(225)两端分别与所述连杆(221)、所述夹持座(223)转动连接。
6.根据权利要求1所述的一种机器人可调节夹持机构,其特征在于:所述垫板(224)为铜板,所述垫板(224)与所述夹持座(223)螺栓连接。
技术总结
本技术公开了一种机器人可调节夹持机构,包括安装在机械手臂端部的固定支撑机构,固定支撑机构下端连接有用于对零件进行夹持的夹持机构,夹持机构呈两侧对称设置;夹持机构包括连接在固定支撑机构上的夹持组件,夹持组件下端连接有用于对夹持范围进行调节的调整组件;夹持组件包括夹持气缸,夹持气缸活动端部连接有滑座,调整组件包括连接在滑座下端的连杆,连杆一侧连接有第一调节气缸。本技术通过调整组件的第一调节气缸、第二调节气缸调整伸缩,使相对的夹持座上的V型槽相对应,改变夹持座的高度间距,然后通过两侧夹持组件的夹持气缸伸缩推动滑座相对移动,使夹持座上的垫板对零件进行夹持固定,提高了对零件夹持的使用范围。
技术研发人员:周会利,张巧玲,马有亮
受保护的技术使用者:洛阳豫甲汽车零部件有限公司
技术研发日:20230221
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!