夹爪机构及机械手的制作方法
本申请涉及夹爪机构设备,具体涉及一种夹爪机构及机械手。
背景技术:
1、一般生产中,需要使用夹爪机构夹紧及松开物料,以便于对物料进行转运、加工等。常见的夹爪机构通常由气缸、电磁阀和手指等组成,夹爪机构在抓取物料时,需使用压缩空气作为动力,通过电磁阀来控制压缩空气的方向,达到控制气缸开合的作用,从而实现夹紧和松开的功效。然而,由于生产中需要用到大量的夹爪机构,夹爪机构的气缸、电磁阀等配件的成本高,导致夹爪机构的使用成本高,增加生产成本。
技术实现思路
1、鉴于以上内容,有必要提出一种夹爪机构及机械手,通过机械结构实现夹紧和松开的功效,降低生产成本。
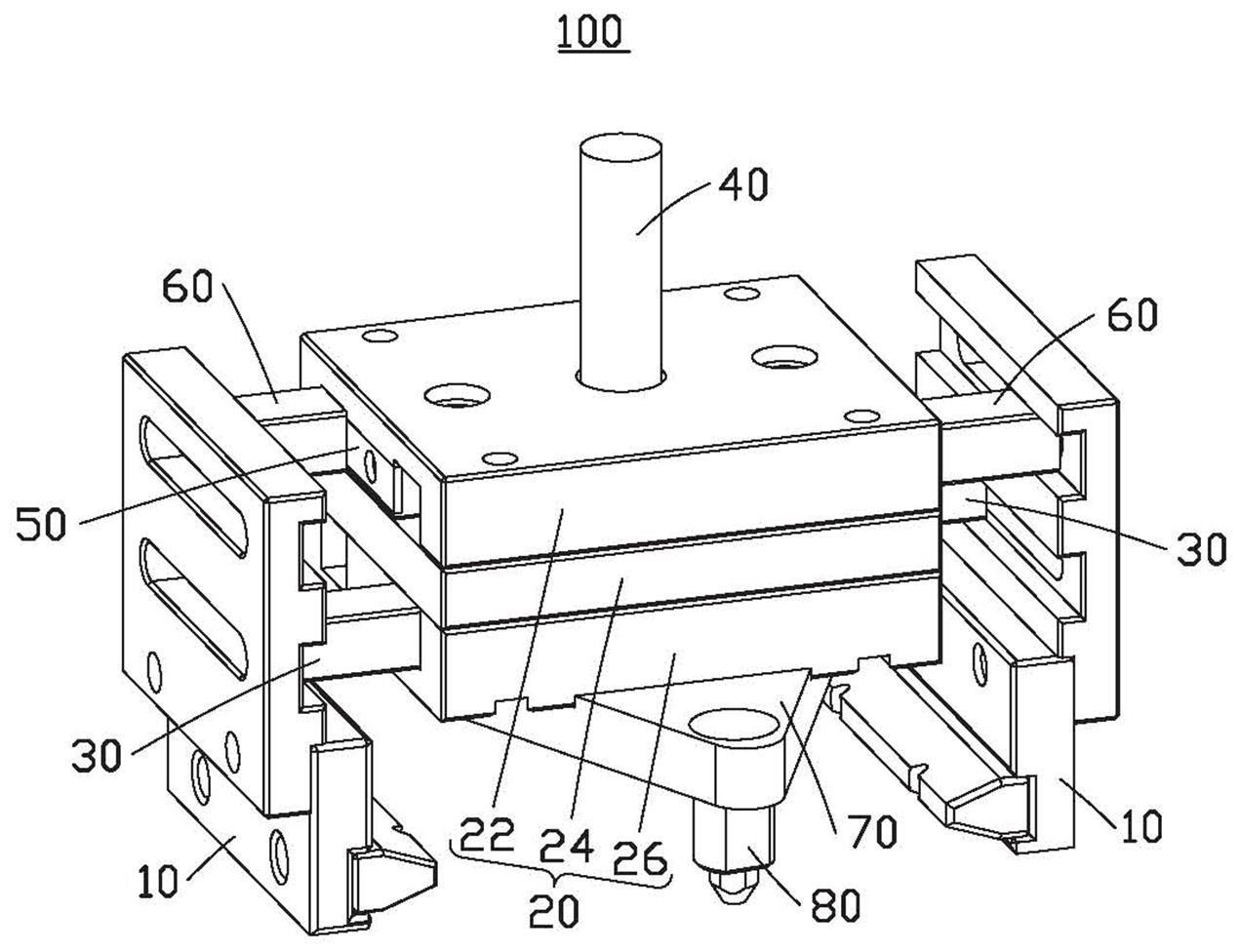
2、本申请实施例提供一种夹爪机构,包括两个夹指,还包括:基座,所述两个夹指分别设置于所述基座的相对两侧;两个滑动件,所述两个滑动件间隔设置,所述两个滑动件滑动设于所述基座且分别伸出所述基座的两侧,每侧的所述滑动件与其中一个所述夹指连接,所述滑动件上开设有导向孔,所述导向孔的延伸方向与所述滑动件的滑动方向互相垂直;驱动组件,转动设于所述基座,所述驱动组件包括凸轮、转动件和两个插销,所述凸轮和所述转动件固定连接,所述两个插销相对于所述驱动组件的转动轴线对称设置于所述转动件,且分别插入对应所述滑动件的所述导向孔内;抵推组件,所述抵推组件设置于所述基座且位于所述凸轮的一侧并弹性抵持所述凸轮,所述驱动组件用于在所述凸轮转动时带动所述转动件转动,以使插入在所述导向孔内的两个插销驱动所述两个滑动件沿相反方向滑动,进而使所述两个夹指相互靠近或远离以用于夹紧或松开物料。
3、上述夹爪机构,通过转动凸轮,凸轮带动转动件转动,进而通过两个插销和两个导向孔驱动两个滑动件沿相反方向滑动,使得两个夹指相互靠近或远离,以用于夹紧或松开物料;通过抵推组件弹性抵持凸轮,避免凸轮发生反向转动的情况,使得夹爪机构无论在打开或闭合时均具有较好的保持力。本申请实施例提供的夹爪机构,通过基座、两个滑动件、驱动组件和抵推组件形成的机械结构,实现了两个夹指夹紧或松开物料的功效,且夹爪机构具有较好的保持力,无需使用气缸、电磁阀等配件,节省了电、气资源,有利于降低夹爪机构的成本和生产成本。
4、在一些实施例中,所述凸轮为菱形结构,所述抵推组件的数量为两个,两个所述抵推组件沿所述滑动件的滑动方向分别设于所述凸轮的两侧以弹性抵持所述凸轮。
5、在一些实施例中,所述抵推组件包括弹性件、抵推件和固定件,所述固定件固定设置于所述基座,所述弹性件的一端与所述固定件抵接,所述弹性件的另一端与所述抵推件抵接,所述抵推件在所述弹性件的弹力作用下弹性抵持所述凸轮。
6、在一些实施例中,所述夹爪机构还包括两个限位件,所述两个限位件间隔设置,所述两个限位件滑动设于所述基座且分别伸出所述基座的两侧,每侧的所述限位件与其中一个所述夹指连接,两个所述限位件设于两个所述滑动件的上方且一一对应,连接于一个所述夹指的所述滑动件设置于连接于另一个所述夹指的所述限位件的下方;所述两个限位件沿所述导向孔的延伸方向分别设于所述凸轮的两侧,所述凸轮具有互相垂直的第一对角线和第二对角线,所述两个限位件之间的距离大于所述第二对角线的长度且小于所述第一对角线的长度。
7、在一些实施例中,所述滑动件沿所述导向孔的延伸方向的至少一侧凸设有止挡部,所述导向孔延伸至所述止挡部,所述止挡部用以限定所述滑动件于所述基座上的滑动范围。
8、在一些实施例中,所述夹爪机构还包括连接板和设于所述连接板的两个导向件,所述连接板连接于所述基座的下侧且位于所述两个夹指之间,以利用所述导向件对所述夹爪机构在取放物料时进行导向。
9、在一些实施例中,所述驱动组件还包括连接件,所述连接件的一端连接于所述凸轮,所述连接件的另一端用于连接机械臂。
10、在一些实施例中,所述夹指面向所述基座的侧面开设有避让槽,一个所述夹指的所述避让槽与连接于另一个所述夹指上的所述滑动件背离另一个所述夹指的一端对应设置。
11、在一些实施例中,所述夹指上设置有用于承托物料的承托部,所述承托部沿所述滑动件的滑动方向朝向所述基座延伸。
12、本申请实施例还提供一种机械手,包括如上任一技术方案所述的夹爪机构。
13、上述机械手,通过基座、两个滑动件、驱动组件和抵推组件形成的机械结构夹爪机构,实现了两个夹指夹紧或松开物料的功效,且机械手的夹爪机构具有较好的保持力,无需使用气缸、电磁阀等配件,节省了电、气资源,有利于降低机械手的成本和生产成本。
技术特征:
1.一种夹爪机构,包括两个夹指,其特征在于,还包括:
2.如权利要求1所述的夹爪机构,其特征在于,所述凸轮为菱形结构,所述抵推组件的数量为两个,两个所述抵推组件沿所述滑动件的滑动方向分别设于所述凸轮的两侧以弹性抵持所述凸轮。
3.如权利要求2所述的夹爪机构,其特征在于,所述抵推组件包括弹性件、抵推件和固定件,所述固定件固定设置于所述基座,所述弹性件的一端与所述固定件抵接,所述弹性件的另一端与所述抵推件抵接,所述抵推件在所述弹性件的弹力作用下弹性抵持所述凸轮。
4.如权利要求2所述的夹爪机构,其特征在于,所述夹爪机构还包括两个限位件,所述两个限位件间隔设置,所述两个限位件滑动设于所述基座且分别伸出所述基座的两侧,每侧的所述限位件与其中一个所述夹指连接,两个所述限位件设于两个所述滑动件的上方且一一对应,连接于一个所述夹指的所述滑动件设置于连接于另一个所述夹指的所述限位件的下方;所述两个限位件沿所述导向孔的延伸方向分别设于所述凸轮的两侧,所述凸轮具有互相垂直的第一对角线和第二对角线,所述两个限位件之间的距离大于所述第二对角线的长度且小于所述第一对角线的长度。
5.如权利要求1所述的夹爪机构,其特征在于,所述滑动件沿所述导向孔的延伸方向的至少一侧凸设有止挡部,所述导向孔延伸至所述止挡部,所述止挡部用以限定所述滑动件于所述基座上的滑动范围。
6.如权利要求1所述的夹爪机构,其特征在于,所述夹爪机构还包括连接板和设于所述连接板的两个导向件,所述连接板连接于所述基座的下侧且位于所述两个夹指之间,以利用所述导向件对所述夹爪机构在取放物料时进行导向。
7.如权利要求1所述的夹爪机构,其特征在于,所述驱动组件还包括连接件,所述连接件的一端连接于所述凸轮,所述连接件的另一端用于连接一机械臂。
8.如权利要求1所述的夹爪机构,其特征在于,所述夹指面向所述基座的侧面开设有避让槽,一个所述夹指的所述避让槽与连接于另一个所述夹指上的所述滑动件背离另一个所述夹指的一端对应设置。
9.如权利要求1所述的夹爪机构,其特征在于,所述夹指上设置有用于承托物料的承托部,所述承托部沿所述滑动件的滑动方向朝向所述基座延伸。
10.一种机械手,其特征在于,包括如权利要求1-9中任一项所述的夹爪机构。
技术总结
本申请公开一种夹爪机构,包括:两个夹指;基座;两个滑动件,滑动设于基座且分别伸出基座的两侧,每侧的滑动件与其中一个夹指连接,滑动件开设有导向孔;驱动组件,包括凸轮、转动件和两个插销,凸轮和转动件连接,两个插销对称设置于转动件,且分别插入对应的导向孔内;抵推组件,设置于基座并弹性抵持凸轮,驱动组件用于在凸轮转动时通过带动转动件转动,以使插入在导向孔内的两个插销驱动两个滑动件沿相反方向滑动,使两个夹指相互靠近或远离以夹紧或松开物料。本申请的夹爪机构,实现夹指夹紧或松开物料的功效,夹爪机构具有较好的保持力,无需使用气缸等配件,有利于降低夹爪机构的成本和生产成本。本申请同时公开一种机械手。
技术研发人员:魏爱萌,吕广众,肖锋,黑乾伟,宋黎平,姜成林,程乾
受保护的技术使用者:富联科技(鹤壁)有限公司
技术研发日:20230224
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!