一种水泥板全自动智能机械手的制作方法
本技术属于机械设备,具体涉及一种水泥板全自动智能机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,在夹芯墙板的产生过程中,通常都需要利用机械手将发泡水泥板抓入模具内,最后在浇灌混泥土完成墙板的制作。
2、现有技术存在的问题:
3、在利用机械抓盘抓取水泥板放入模具内的过程中,水泥板在脱离抓盘时,其与模具之间存在一定的高度差,再次高度差内水泥板将做自由落体运动,而在此过程中,水泥板很可能直接被磕破损坏,进而增加了水泥板的破损率,最终会直接影响墙板成品的质量,提高了次品率;另外,抓盘在抓取水泥板,水泥板边缘的棱角处难免会因为抓取力度过大而破碎,破碎后的粉尘颗粒极大可能落在水泥板的表面,此粉尘颗粒若不及时清楚,将会降低水泥板与混凝土之间的粘黏效果。
技术实现思路
1、本实用新型的目的是提供一种水泥板全自动智能机械手,能够在水泥板下落的过程中,给予水泥板相应的摩擦力用于减缓发泡水泥板下落的过程,大大降低了水泥板在运输中出现损坏的情况,同时还可清除附着在水泥板表面的粉尘,保证水泥板与混凝土之间良好的粘黏性。
2、本实用新型采取的技术方案具体如下:
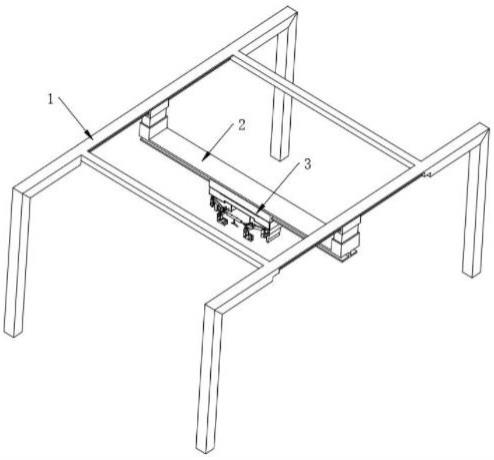
3、一种水泥板全自动智能机械手,包括机械手大架,所述机械手大架的内部活动组装有轨道机,所述轨道机的底部活动组装有机械抓盘,所述机械抓盘的两侧两端外壁均设置有辅助夹持水泥板的侧缓放夹具,位于同一侧的两个所述侧缓放夹具之间设置有用于清除水泥板表面灰尘的清尘组件;
4、所述侧缓放夹具包括转臂,且所述转臂通过设置的转架转动安装在所述机械抓盘的侧壁,且所述转臂的末端开设有直槽,所述机械抓盘外壁并位于转臂的末端均固定安装有直轨,且所述直轨的内部贯穿设置有穿杆,所述穿杆的中部固定安装有滑动安装在直轨内部的滑块,且所述穿杆的顶端活动插接入直槽的内部,而所述穿杆的底端固定安装有背板;
5、所述背板内侧通过贯穿的导杆活动组装有夹板,且所述导杆外表面并位于背板与夹板之间套设有弹簧。
6、所述机械抓盘的底部两端对称式活动组装有抓爪,所述抓爪的两侧外壁均固定安装有抵架,且所述抵架的内侧活动组装有用于抵住转臂的抵块。
7、所述直轨的末端活动螺接有用于调节滑块初始位置的调节螺栓一,所述抵架的外壁活动螺接有用于调节抵块初始位置的调节螺栓二。
8、所述清尘组件包括气泵管,所述气泵管的两端对称式活动插接有活塞杆,两个所述活塞杆相背离的一端分别与相邻的两个转臂末端转动连接,两个所述活塞杆相靠近的一端均固定安装有活塞。
9、所述气泵管的中部底侧固定连接有喷气支管,所述气泵管的外壁上方固定连接有补气管。
10、所述喷气支管以及所述补气管靠近气泵管的一端内部均固定安装有单向阀。
11、本实用新型取得的技术效果为:
12、本实用新型,当需要放下水泥板时,抓爪复位移动,两个抓爪将优先远离水泥板,此时,背板也将同时远离水泥板,但是在弹簧的作用下,夹板对水泥板的夹持力将缓慢降低,因此水泥板在下落过程中,夹板会给予水泥板相应的摩擦力,用于减缓发泡水泥板下落的过程,通过此方式避免水泥板在被抓爪松开后直接坠向模具而磕坏的意外,大大降低了水泥板在运输中出现损坏的情况。
13、本实用新型,在同一侧的两个转臂同时旋转的过程中,与这两个转臂转接的活塞杆将同时向一个气泵管内移动,此时,在活塞的作用下,气泵管内部的空气将通过喷气支管喷向发泡水泥板的表面,进而将清除附着在水泥板表面的粉尘,避免其影响后续混凝土的浇筑,保证水泥板与混凝土之间良好的粘黏性,保证成品墙板的质量。
技术特征:
1.一种水泥板全自动智能机械手,包括机械手大架(1),其特征在于:所述机械手大架(1)的内部活动组装有轨道机(2),所述轨道机(2)的底部活动组装有机械抓盘(3),所述机械抓盘(3)的两侧两端外壁均设置有辅助夹持水泥板的侧缓放夹具(4),位于同一侧的两个所述侧缓放夹具(4)之间设置有用于清除水泥板表面灰尘的清尘组件(5);
2.根据权利要求1所述的一种水泥板全自动智能机械手,其特征在于:所述机械抓盘(3)的底部两端对称式活动组装有抓爪(301),所述抓爪(301)的两侧外壁均固定安装有抵架(412),且所述抵架(412)的内侧活动组装有用于抵住转臂(401)的抵块(413)。
3.根据权利要求2所述的一种水泥板全自动智能机械手,其特征在于:所述直轨(404)的末端活动螺接有用于调节滑块(406)初始位置的调节螺栓一(405),所述抵架(412)的外壁活动螺接有用于调节抵块(413)初始位置的调节螺栓二(414)。
4.根据权利要求1所述的一种水泥板全自动智能机械手,其特征在于:所述清尘组件(5)包括气泵管(501),所述气泵管(501)的两端对称式活动插接有活塞杆(502),两个所述活塞杆(502)相背离的一端分别与相邻的两个转臂(401)末端转动连接,两个所述活塞杆(502)相靠近的一端均固定安装有活塞(503)。
5.根据权利要求4所述的一种水泥板全自动智能机械手,其特征在于:所述气泵管(501)的中部底侧固定连接有喷气支管(504),所述气泵管(501)的外壁上方固定连接有补气管(505)。
6.根据权利要求5所述的一种水泥板全自动智能机械手,其特征在于:所述喷气支管(504)以及所述补气管(505)靠近气泵管(501)的一端内部均固定安装有单向阀。
技术总结
本技术属于机械设备技术领域,具体涉及一种水泥板全自动智能机械手,包括机械手大架,所述机械手大架的内部活动组装有轨道机,所述轨道机的底部活动组装有机械抓盘,所述机械抓盘的两侧两端外壁均设置有辅助夹持水泥板的侧缓放夹具,位于同一侧的两个所述侧缓放夹具之间设置有用于清除水泥板表面灰尘的清尘组件,所述背板内侧通过贯穿的导杆活动组装有夹板,且所述导杆外表面并位于背板与夹板之间套设有弹簧。本技术能够在水泥板下落的过程中,给予水泥板相应的摩擦力用于减缓发泡水泥板下落的过程,大大降低了水泥板在运输中出现损坏的情况,同时还可清除附着在水泥板表面的粉尘,保证水泥板与混凝土之间良好的粘黏性。
技术研发人员:李园,杨丹丹,王汝成,王旭,陈迎,杜倩楠
受保护的技术使用者:江苏顺为绿色建筑科学研究院有限公司
技术研发日:20230302
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!