一种用于数控机器人手臂的线束卡扣的制作方法
本技术涉及数控机器人领域,具体为一种用于数控机器人手臂的线束卡扣。
背景技术:
1、关于机器人手臂的专利,经过检索,现有技术公开(申请号:cn202110861615.3)一种具有循环润滑和弯曲保护功能的数控机器人手臂;文中提出“所述第一机械臂(2)转动安装在底座(1)的顶端面中心,所述第二机械臂(3)的一端转动安装在第一机械臂(2)的顶端中部,所述防护机构(4)固定安装在第二机械臂(3)的一端边缘外表面,所述第二机械臂(3)的内部包括螺纹孔(31)、限位轴孔(32)、插接孔(33)和卡接槽(34),所述螺纹孔(31)对称开设在第二机械臂(3)的一端两侧边缘,所述限位轴孔(32)开设在第二机械臂(3)的一端边缘外表面,所述卡接槽(34)对称开设在第二机械臂(3)的一端边缘外表面,所述插接孔(33)对称开设在卡接槽(34)的内部一端两侧边缘;”在现有技术中,数控机器人手臂上安装多组线束,通过线束对数控机器人传递控制信号;
2、为避免线束过于杂乱,从而导致短路等问题出现,造成安装隐患;目前多采用线束固定限位管夹将线束进行规整,并将其固定于机器人手臂部位,但是目前的线束固定限位管夹卡接不牢靠,很容易松脱,存在安全隐患,并且其位置一旦固定,便很难改变,使用非常不方便;
技术实现思路
1、本实用新型的目的在于提供一种用于数控机器人手臂的线束卡扣,以解决上述背景技术中提到的缺陷。
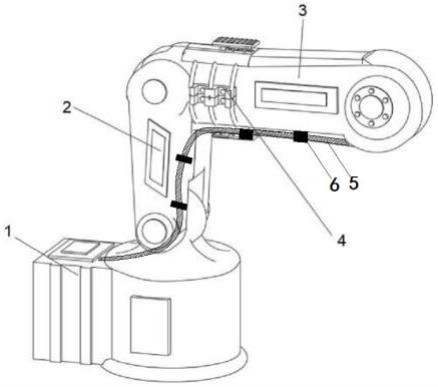
2、为实现上述目的,提供一种用于数控机器人手臂的线束卡扣,包括底座,底座上活动安装有第一机械臂,且第一机械臂远离底座的端部与第二机械臂活动连接,同时第二机械臂上安装有防护机构,所述第二机械臂与第一机械臂均通过线束卡扣组件对线束进行限位固定,且线束卡扣组件的强磁铁吸附在数控机器人的手臂上,且强磁铁表面与下座粘接固定,同时下座上安装有铰链,并且下座与卡盖端部之间通过铰链进行活动连接,卡盖远离铰链的一端与下卡条进行固定,且下座远离铰链的一端与上卡条进行固定,线束卡接在下座和卡盖之间。
3、优选的,所述线束卡扣组件包括强磁铁、下座、铰链、卡盖、下卡条和上卡条,且下座表面开设有上限位槽,同时卡盖表面开设有下限位槽。
4、优选的,所述下限位槽与上限位槽组合在一起构成限位区域,且线束卡接在限位区域的内部。
5、优选的,所述下卡条与上卡条的尺寸相适配,且下座和卡盖之间通过与上卡条进行卡接固定。
6、优选的,所述下卡条端部与卡榫固定连接,且上卡条开设有卡槽,同时卡槽与卡榫的尺寸相适配,并且卡榫卡接在卡槽的内部。
7、优选的,所述上卡条的左侧开设有容纳槽,且容纳槽与上卡条平行设置,同时按压上卡条,卡槽与卡榫发生脱落。
8、与现有技术相比,本实用新型的有益效果是:
9、线束卡扣组件通过强磁铁吸附在数控机器人手臂上,通过强磁铁进行安装的方式,可通过改变线束卡扣组件在数控机器人手臂上的位置,来对不同位置的线束进行适配;
10、线束卡接在下座和盖之间,对线束进行限位,可避免目前的线束固定限位管夹卡接不牢靠,容易松脱,存在安全隐患,并且其位置一旦固定,便很难改变,使用非常不方便的情况发生。
技术特征:
1.一种用于数控机器人手臂的线束卡扣,包括底座(1),底座(1)上活动安装有第一机械臂(2),且第一机械臂(2)远离底座(1)的端部与第二机械臂(3)活动连接,同时第二机械臂(3)上安装有防护机构(4),其特征在于:所述第二机械臂(3)与第一机械臂(2)均通过线束卡扣组件(6)对线束(5)进行限位固定,且线束卡扣组件(6)的强磁铁(60)吸附在数控机器人的手臂上,且强磁铁(60)表面与下座(61)粘接固定,同时下座(61)上安装有铰链(63),并且下座(61)与卡盖(64)端部之间通过铰链(63)进行活动连接,卡盖(64)远离铰链(63)的一端与下卡条(66)进行固定,且下座(61)远离铰链(63)的一端与上卡条(68)进行固定,线束(5)卡接在下座(61)和卡盖(64)之间。
2.根据权利要求1所述的一种用于数控机器人手臂的线束卡扣,其特征在于:所述线束卡扣组件(6)包括强磁铁(60)、下座(61)、铰链(63)、卡盖(64)、下卡条(66)和上卡条(68),且下座(61)表面开设有上限位槽(62),同时卡盖(64)表面开设有下限位槽(65)。
3.根据权利要求2所述的一种用于数控机器人手臂的线束卡扣,其特征在于:所述下限位槽(65)与上限位槽(62)组合在一起构成限位区域,且线束(5)卡接在限位区域的内部。
4.根据权利要求1所述的一种用于数控机器人手臂的线束卡扣,其特征在于:所述下卡条(66)与上卡条(68)的尺寸相适配,且下座(61)和卡盖(64)之间通过与上卡条(68)进行卡接固定。
5.根据权利要求4所述的一种用于数控机器人手臂的线束卡扣,其特征在于:所述下卡条(66)端部与卡榫(67)固定连接,且上卡条(68)开设有卡槽(69),同时卡槽(69)与卡榫(67)的尺寸相适配,并且卡榫(67)卡接在卡槽(69)的内部。
6.根据权利要求5所述的一种用于数控机器人手臂的线束卡扣,其特征在于:所述上卡条(68)的左侧开设有容纳槽(70),且容纳槽(70)与上卡条(68)平行设置,同时按压上卡条(68),卡槽(69)与卡榫(67)发生脱落。
技术总结
本技术公开了一种用于数控机器人手臂的线束卡扣,包括底座,底座上活动安装有第一机械臂,且第一机械臂远离底座的端部与第二机械臂活动连接,同时第二机械臂上安装有防护机构,所述第二机械臂与第一机械臂均通过线束卡扣组件对线束进行限位固定,且线束卡扣组件的强磁铁吸附在数控机器人的手臂上,且强磁铁表面与下座粘接固定,同时下座上安装有铰链。该用于数控机器人手臂的线束卡扣,线束卡扣组件通过强磁铁吸附在数控机器人手臂上,通过强磁铁进行安装的方式,可通过改变线束卡扣组件在数控机器人手臂上的位置,来对不同位置的线束进行适配。
技术研发人员:秦成亮,刘深龙,黄少志
受保护的技术使用者:昆山戈冉德机器人系统有限公司
技术研发日:20230310
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!