一种便于角度调节的瓶盖夹持机械手臂的制作方法
本技术涉及瓶盖夹持设备,具体为一种便于角度调节的瓶盖夹持机械手臂。
背景技术:
1、在公告号为cn213796508u的专利中公开了一种酱油壶加工用便于角度调节的瓶盖夹持机械手臂,包括基座和机械爪,所述基座右端中部包裹有连接机臂,且连接机臂右端中部贯穿有阻尼轴,所述连接机臂上端设置有液压组件,且连接机臂内部右端连接有伸缩支杆,所述机械爪设置于伸缩支杆右侧,且机械爪左端外侧活动连接有轴承套,所述机械爪中部开设有滑槽,且滑槽内部连接有夹指。该酱油壶加工用便于角度调节的瓶盖夹持机械手臂设置有连接机臂,基座中部包裹夹持连接机臂进行定位,同时两者连接处中部贯穿有阻尼轴活动,使得连接机臂能够进行左右翻转活动,便于对连接机臂以及其连接的机械爪器件进行一定的角度调节,提高整个夹持机械手臂的灵活性和实用性。
2、上述技术中通过夹指对瓶盖进行夹持,其虽然设置了防滑凸起,但与瓶盖的接触面为切性式接触,依旧存在夹持不够稳定的问题,故在此技术上进行创新。
技术实现思路
1、本实用新型的目的在于提供一种便于角度调节的瓶盖夹持机械手臂,以解决上述背景技术中提出的问题。
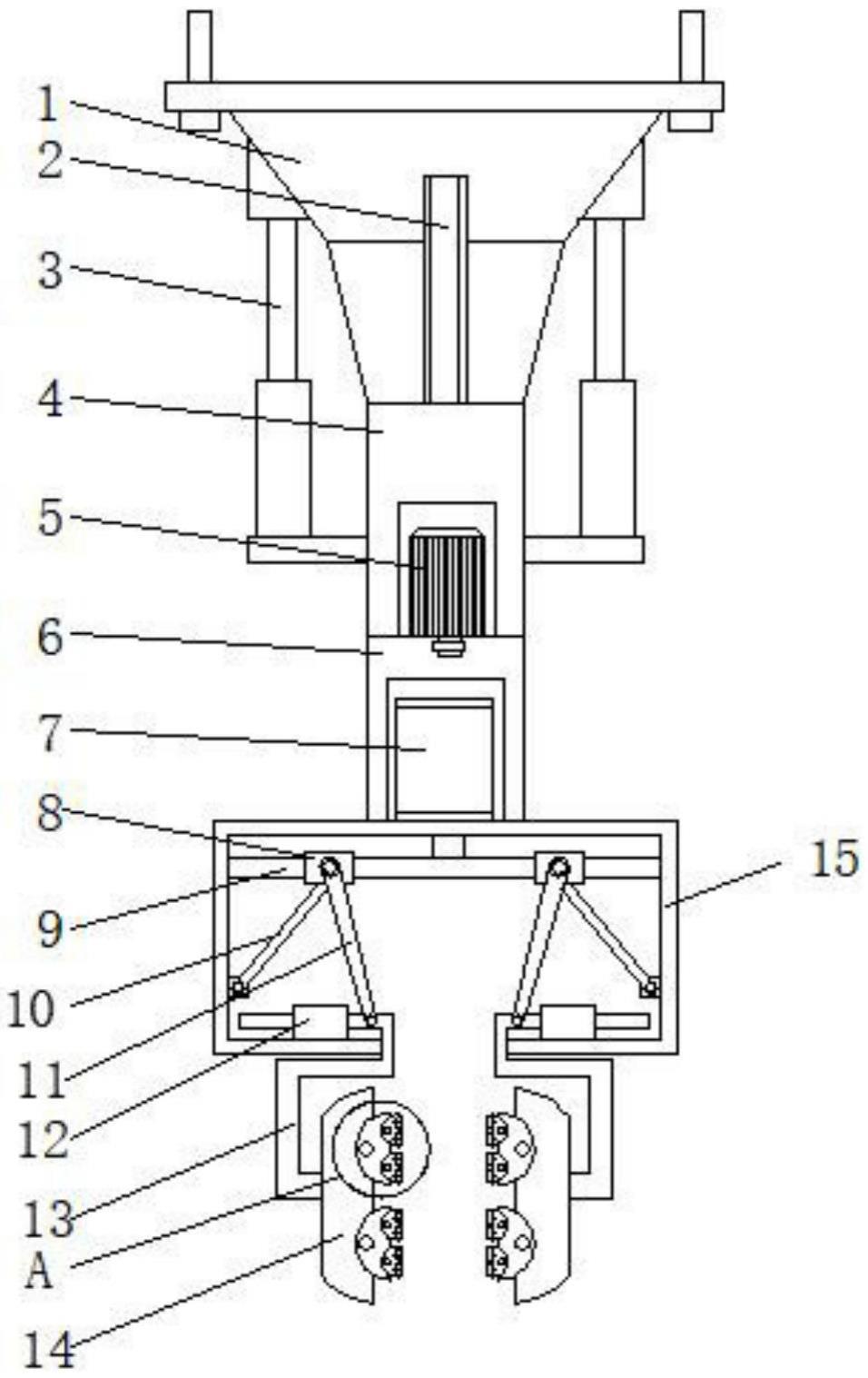
2、为实现上述目的,本实用新型提供如下技术方案:一种便于角度调节的瓶盖夹持机械手臂,包括固定基座,所述固定基座下侧活动连接有旋转座,所述旋转座下侧活动连接有升降座,所述固定基座两侧均固定有电动推杆,两组电动推杆下侧分别通过连接块固定于旋转座两侧,所述旋转座内侧固定有旋转电机,所述旋转电机下侧输出轴与升降座连接,所述升降座内固定有电动缸,所述升降座下侧焊接固定有夹持臂,所述电动缸下侧伸缩杆穿过夹持臂固定连接有升降杆,所述升降杆上套装有方形套,所述方形套后侧转动连接有第一连杆,所述第一连杆与夹持臂内侧转动连接,所述夹持臂内下侧固定有两组导向套,所述导向套内侧滑动连接有夹持杆,所述方形套前侧转动连接有第二连杆,所述第二连杆另一端与夹持杆一侧转动连接,所述夹持杆另一端固定有夹持座。
3、优选的,所述夹持座上通过转轴连接有两组第一夹持件,所述第一夹持件上通过转轴连接有两组第二夹持件,两组第二夹持件上通过转轴连接有两组第三夹持件。
4、优选的,所述第一夹持件、第二夹持件以及第三夹持件俯视横截面均呈半圆形,且第一夹持件、第二夹持件以及第三夹持件规格依次减小。
5、优选的,所述夹持杆俯视横截面呈弓字型。
6、优选的,所述固定基座内侧开设有导向孔,所述旋转座上端焊接固定有导向杆,所述导向杆滑动连接于导向孔内。
7、优选的,所述固定基座上端拐角处开设有螺纹孔,所述螺纹孔内通过螺纹连接有用于固定的螺栓。
8、与现有技术相比,本实用新型的有益效果是:一种便于角度调节的瓶盖夹持机械手臂,
9、通过固定基座与升降座两侧的电动伸缩杆,可以对升降座的高度进行调,通过旋转座内侧的旋转电机,可以对升降座的角度进行调节,通过升降座内的电动缸可以对升降杆进行推动,进而通过转动连接的第一连杆,可以推动方形套在升降杆上进行移动,进而通过方形套上转动连接的第二连杆可以推动夹持臂沿着导向套进行移动,进而带动夹持座相对移动,通过夹持座上的活动的第一夹持件、第二夹持件以及第三夹持件的配合,可以与瓶盖侧壁相接触,实现夹持,且适用于多种不同规格的瓶盖,且能够保证对瓶盖夹持的稳定性。
技术特征:
1.一种便于角度调节的瓶盖夹持机械手臂,包括固定基座(1),其特征在于:所述固定基座(1)下侧活动连接有旋转座(4),所述旋转座(4)下侧活动连接有升降座(6),所述固定基座(1)两侧均固定有电动推杆(3),两组电动推杆(3)下侧分别通过连接块固定于旋转座(4)两侧,所述旋转座(4)内侧固定有旋转电机(5),所述旋转电机(5)下侧输出轴与升降座(6)连接,所述升降座(6)内固定有电动缸(7),所述升降座(6)下侧焊接固定有夹持臂(13),所述电动缸(7)下侧伸缩杆穿过夹持臂(13)固定连接有升降杆(9),所述升降杆(9)上套装有方形套(8),所述方形套(8)后侧转动连接有第一连杆(10),所述第一连杆(10)与夹持臂(13)内侧转动连接,所述夹持臂(13)内下侧固定有两组导向套(12),所述导向套(12)内侧滑动连接有夹持杆(15),所述方形套(8)前侧转动连接有第二连杆(11),所述第二连杆(11)另一端与夹持杆(15)一侧转动连接,所述夹持杆(15)另一端固定有夹持座(14)。
2.根据权利要求1所述的一种便于角度调节的瓶盖夹持机械手臂,其特征在于:所述夹持座(14)上通过转轴连接有两组第一夹持件(16),所述第一夹持件(16)上通过转轴连接有两组第二夹持件(17),两组第二夹持件(17)上通过转轴连接有两组第三夹持件(18)。
3.根据权利要求2所述的一种便于角度调节的瓶盖夹持机械手臂,其特征在于:所述第一夹持件(16)、第二夹持件(17)以及第三夹持件(18)俯视横截面均呈半圆形,且第一夹持件(16)、第二夹持件(17)以及第三夹持件(18)规格依次减小。
4.根据权利要求1所述的一种便于角度调节的瓶盖夹持机械手臂,其特征在于:所述夹持杆(15)俯视横截面呈弓字型。
5.根据权利要求1所述的一种便于角度调节的瓶盖夹持机械手臂,其特征在于:所述固定基座(1)内侧开设有导向孔,所述旋转座(4)上端焊接固定有导向杆(2),所述导向杆(2)滑动连接于导向孔内。
6.根据权利要求1所述的一种便于角度调节的瓶盖夹持机械手臂,其特征在于:所述固定基座(1)上端拐角处开设有螺纹孔,所述螺纹孔内通过螺纹连接有用于固定的螺栓。
技术总结
本技术公开了一种便于角度调节的瓶盖夹持机械手臂,包括固定基座,所述固定基座下侧活动连接有旋转座,所述旋转座下侧活动连接有升降座,所述固定基座两侧均固定有电动推杆,两组电动推杆下侧分别通过连接块固定于旋转座两侧,所述旋转座内侧固定有旋转电机,所述旋转电机下侧输出轴与升降座连接。本技术通过升降座内的电动缸可以对升降杆进行推动,进而通过转动连接的第一连杆,可以推动方形套在升降杆上进行移动,进而通过方形套上转动连接的第二连杆可以推动夹持臂沿着导向套进行移动,进而带动夹持座相对移动,通过夹持座上的活动的第一夹持件、第二夹持件以及第三夹持件的配合,可以与瓶盖侧壁相接触,实现夹持。
技术研发人员:冯有然
受保护的技术使用者:上海天渡精密机械有限公司
技术研发日:20230317
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!