一种物流分拣用机械手臂
本技术属于物流分拣,具体是指一种物流分拣用机械手臂。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、现有的技术在利用机器人手臂分拣对物体进行分拣,在使用的时候存在一定的缺陷,现有的对机器臂不方便移动,在对物体进行分拣的的时候使用较为不便。
技术实现思路
1、为了解决上述难题,本实用新型提供了一种便于对机械手臂进行移动,使用灵活方便的物流分拣用机械手臂。
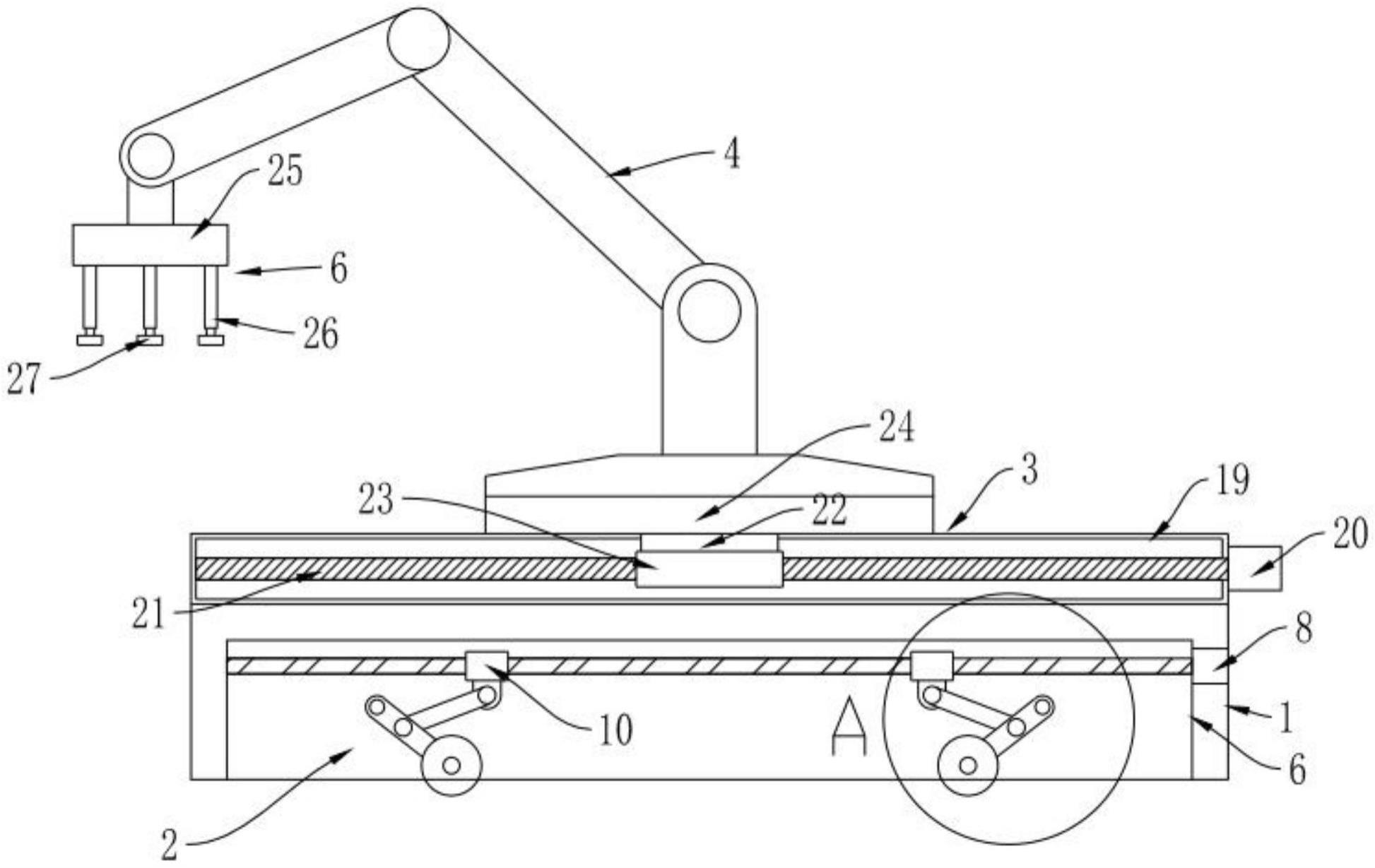
2、为了实现上述功能,本实用新型采取的技术方案如下:一种物流分拣用机械手臂,包括支撑底座、移动调节机构、移动组件、手臂和抓手,所述移动调节机构设于支撑底座底壁上,所述移动组件设于支撑底座顶壁下,所述手臂安装在移动组件上,所述抓手设于手臂的一端上;所述移动调节机构包括嵌槽、双向丝杠、伺服电机、丝杠副一、丝杠副二、固定轴、支撑腿、连接杆、连接块和移动驱动组件,所述嵌槽设于支撑底座底壁上,所述伺服电机设于支撑底座外侧壁上,所述双向丝杠一端转动设于嵌槽内侧壁上,所述双向丝杠另一端设于伺服电机上,所述丝杠副一和丝杠副二套接于双向丝杠上,所述连接块设于丝杠副一和丝杠副二外侧壁上,所述固定轴固定在嵌槽内侧壁上,所述支撑腿转动套接于固定轴上,所述连接杆一端转动设于连接块上,所述连接杆另一端转动设于支撑腿上,所述移动组件设于支撑腿上。
3、优选地,所述移动驱动组件包括驱动电机一、连接轴和移动轮,所述驱动电机一设于支撑腿外侧壁上,所述移动轮固定套接于固定轴上,驱动电机一带动连接轴和移动轮转动,从而进行移动。
4、优选地,所述移动组件包括活动腔、驱动电机二、螺纹杆、衔接板、螺纹套块和底盘,所述活动腔设于支撑底座顶壁下,所述驱动电机二设于支撑底座外侧壁上,所述螺纹杆一端转动设于活动腔内侧壁上,所述螺纹杆另一端设于驱动电机二上,所述螺纹套块套接于螺纹杆上,所述衔接板贯穿活动腔和支撑底座顶壁设于螺纹套块上,所述底盘固定在衔接板上,驱动电机二带动螺纹杆转动,螺纹杆带动螺纹套块和衔接板移动,衔接板带动底盘移动,从而带动手臂和抓手整体移动,对手臂的位置进行调节。
5、优选地,所述抓手包括基板、电动伸缩杆和真空吸盘,所述基板安装在手臂一端上,所述电动伸缩杆安装在基板下,所述真空吸盘安装在电动伸缩杆下。
6、优选地,所述手臂安装在底盘上。
7、本实用新型采取上述结构取得有益效果如下:本实用新型提供的一种物流分拣用机械手臂,通过移动调节机构的设置,伺服电机带动双向丝杠转动,双向丝杠带动丝杠副一和丝杠副二移动,丝杠副一和丝杠副二带动连接块移动,连接块移动带动连接杆转动,连接杆带动支撑腿转动,支撑腿带动移动轮转动,将移动轮转出嵌槽底,将支撑底座支撑起来,同时驱动电机一带动连接轴和移动轮移动,对手臂整体进行移动,在不使用时将移动轮收回至嵌槽内,将支撑底座置于地面上,增加放置的稳定性,使用更加方便。
技术特征:
1.一种物流分拣用机械手臂,其特征在于:包括支撑底座(1)、移动调节机构(2)、移动组件(3)、手臂(4)和抓手(5),所述移动调节机构(2)设于支撑底座(1)底壁上,所述移动组件(3)设于支撑底座(1)顶壁下,所述手臂(4)安装在移动组件(3)上,所述抓手(5)设于手臂(4)的一端上;所述移动调节机构(2)包括嵌槽(6)、双向丝杠(7)、伺服电机(8)、丝杠副一(9)、丝杠副二(10)、固定轴(11)、支撑腿(12)、连接杆(13)、连接块(14)和移动驱动组件(15),所述嵌槽(6)设于支撑底座(1)底壁上,所述伺服电机(8)设于支撑底座(1)外侧壁上,所述双向丝杠(7)一端转动设于嵌槽(6)内侧壁上,所述双向丝杠(7)另一端设于伺服电机(8)上,所述丝杠副一(9)和丝杠副二(10)套接于双向丝杠(7)上,所述连接块(14)设于丝杠副一(9)和丝杠副二(10)外侧壁上,所述固定轴(11)固定在嵌槽(6)内侧壁上,所述支撑腿(12)转动套接于固定轴(11)上,所述连接杆(13)一端转动设于连接块(14)上,所述连接杆(13)另一端转动设于支撑腿(12)上,所述移动组件(3)设于支撑腿(12)上。
2.根据权利要求1所述的一种物流分拣用机械手臂,其特征在于:所述移动驱动组件(15)包括驱动电机一(16)、连接轴(17)和移动轮(18),所述驱动电机一(16)设于支撑腿(12)外侧壁上,所述移动轮(18)固定套接于固定轴(11)上。
3.根据权利要求2所述的一种物流分拣用机械手臂,其特征在于:所述移动组件(3)包括活动腔(19)、驱动电机二(20)、螺纹杆(21)、衔接板(22)、螺纹套块(23)和底盘(24),所述活动腔(19)设于支撑底座(1)顶壁下,所述驱动电机二(20)设于支撑底座(1)外侧壁上,所述螺纹杆(21)一端转动设于活动腔(19)内侧壁上,所述螺纹杆(21)另一端设于驱动电机二(20)上,所述螺纹套块(23)套接于螺纹杆(21)上,所述衔接板(22)贯穿活动腔(19)和支撑底座(1)顶壁设于螺纹套块(23)上,所述底盘(24)固定在衔接板(22)上。
4.根据权利要求3所述的一种物流分拣用机械手臂,其特征在于:所述抓手(5)包括基板(25)、电动伸缩杆(26)和真空吸盘(27),所述基板(25)安装在手臂(4)一端上,所述电动伸缩杆(26)安装在基板(25)下,所述真空吸盘(27)安装在电动伸缩杆(26)下。
5.根据权利要求4所述的一种物流分拣用机械手臂,其特征在于:所述手臂(4)安装在底盘(24)上。
技术总结
本技术公开了一种物流分拣用机械手臂,包括支撑底座、移动调节机构、移动组件、手臂和抓手,所述移动调节机构设于支撑底座底壁上,所述移动组件设于支撑底座顶壁下,所述手臂安装在移动组件上,所述抓手设于手臂的一端上;所述移动调节机构包括嵌槽、双向丝杠、伺服电机、丝杠副一、丝杠副二、固定轴、支撑腿、连接杆、连接块和移动驱动组件,所述嵌槽设于支撑底座底壁上,所述伺服电机设于支撑底座外侧壁上,所述双向丝杠一端转动设于嵌槽内侧壁上。本技术属于物流分拣技术领域,具体是指一种便于对机械手臂进行移动,使用灵活方便的物流分拣用机械手臂。
技术研发人员:白保琦,王淑娟
受保护的技术使用者:兰州石化职业技术大学
技术研发日:20230330
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!