一种高效定位行走机器人的定位装置的制作方法
本技术涉及行走机器人与定子屏蔽套定位的,特别是一种高效定位行走机器人的定位装置。
背景技术:
1、屏蔽主泵定子屏蔽套通过塑性变形紧贴在定子内腔,不利于实施检修工作;主泵检修过程中,定子组件置于正立支架上,若定子屏蔽器打压试验不合格,则表明屏蔽套的内壁上可能存在破口,需寻找到破口位置并进行维修处理。定子屏蔽套长度约4m,且直接与一回路介质接触,导致辐射剂量大,不利于维修人员的检查工作,也不符合alara原则。定子屏蔽套1的结构如图1所示,其内沿其轴向上开设有通孔2,通孔2的端口处设置有台阶孔3。
2、车间内的工人采用如图2所示的行走机器人来检查定子屏蔽套1内壁上的破口,行走机器人包括本体4,本体4的底部设置有驱动电机,驱动电机上安装有驱动轮5,本体4的顶表面上固设有两个交叉设置的连杆,连杆的顶部旋转安装有辅助轮6,本体4上设置有摄像头,摄像头用于拍摄定子屏蔽套1的内壁图像。
3、利用该行走机器人检查定子屏蔽套内壁上破口的方法是:
4、s1、工人用吊装机将行走机器人吊装起来,使其与定子屏蔽套1处于同一高度,吊装起来后,工人移动行走机器人的前后位置,以确保行走机器人的驱动轮5和两个辅助轮6均与定子屏蔽套1的通孔2的内壁相切,从而实现了行走机器人与定子屏蔽套1的定位;
5、s2、工人将行走机器人推入到定子屏蔽套1的通孔2内,而后解开绳子,此时驱动轮5和两个辅助轮6均与定子屏蔽套1的通孔2的内壁相接触;最后工人控制行走机器人的驱动电机启动,驱动电机带动驱动轮5转动,驱动轮5带动行走机器人在定子屏蔽套1的通孔2内移动,在移动过程中,行走机器人上的摄像头拍摄定子屏蔽套1的通孔2的内壁图像,并将图像发送给控制器,工人在控制器上的显示屏上即可查看定子屏蔽套1的内壁上是否存在破口。
6、然而,在步骤s1中,在定位行走机器人与定子屏蔽套1的操作时,工人需先用绳子将行走机器人的本体4绑住,而后采用吊装机向上拉绳子,以将行走机器人吊装起来,这样才能实现对行走机器人定位,这种定位方式,无疑是增加了捆绑本体4的工序,从而增加了定位行走机器人的所用时间,进而降低了行走机器人与定子屏蔽套定位效率。
7、此外,当行走机器人提升到位后,需要工人频繁的调节行走机器人的前后位置,才能实现行走机器人与定子屏蔽套1的定位,频繁调整位置,无疑是增加了定位行走机器人所用时间,极大的降低了行走机器人与定子屏蔽套1定位的效率。因此,亟需一种缩短行走机器人的定位时间、极大提高行走机器人与定子屏蔽套定位效率的高效定位装置。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种结构紧凑、缩短行走机器人的定位时间、极大提高行走机器人与定子屏蔽套定位效率、操作简单的高效定位行走机器人的定位装置。
2、本实用新型的目的通过以下技术方案来实现:一种高效定位行走机器人的定位装置,它包括提升安装机构和导向机构,提升安装机构包括底座和微调组件,所述底座上固设有机架,机架的右侧滑动安装有升降板,机架的上端部旋转安装有定向轮,机架的左侧设置有自锁绞盘,自锁绞盘上的钢绳绕过定向轮且固设于升降板上,所述微调组件设置于升降板的顶表面上;
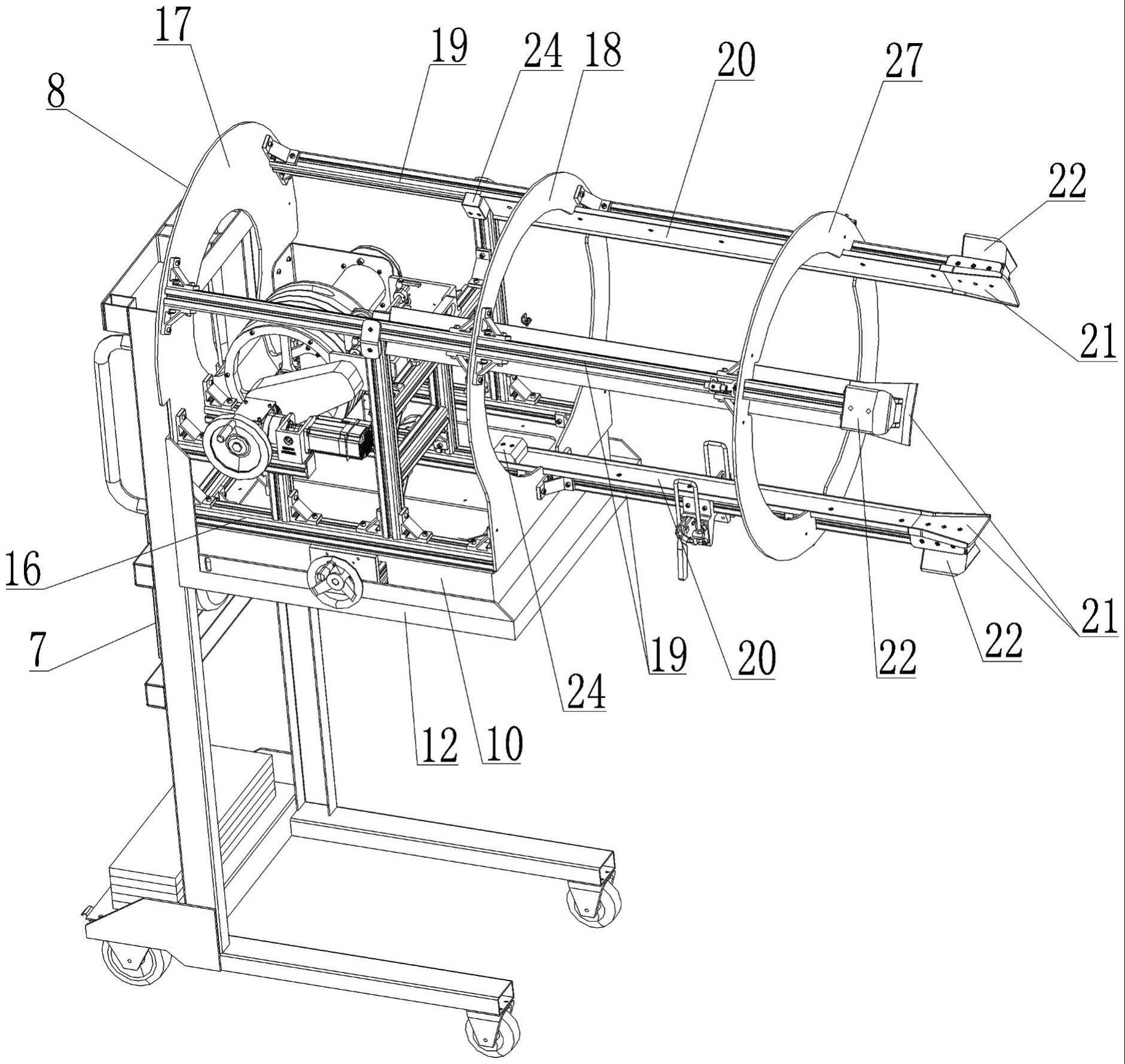
3、所述导向机构设置于微调组件的平台上,导向机构包括固设于平台顶表面上的支架,支架的顶表面上固设于左侧环形板和中间环形板,左侧环形板和中间环形板支架固设有三个连接架,三个连接架均向右延伸于升降板的外部,三个连接架的内端面上沿其长度方向均固设有导轨,三个导轨的右端部均固设有喇叭口,三个喇叭口分别与三个导轨的导向槽对接,三个喇叭口的外端面上均固设有定位块,定位块的外端面为弧形面,三个弧形面所围成的直径与定子屏蔽套的台阶孔的大孔直径相等;三个导轨的导向槽内且位于其左端部均固设有限位块。
4、所述底座的底表面上设置有多个万向轮。
5、所述底座的顶表面上还固设有位于机架左侧的配重块。
6、所述定位块为橡胶块。
7、三个连接架之间还固设有右侧环形板,右侧环形板设置于升降板的右侧。
8、所述左侧环形板、中间环形板和右侧环形板相互平行设置。
9、所述微调组件包括平台、固设于升降板顶表面上的两个安装座、固设于升降板顶表面上的轨道,两个安装座之间旋转安装有纵向设置的丝杆,丝杆上螺纹连接有螺母,所述平台固设于螺母的顶表面上,平台的底表面上固设有滑块,滑块滑动安装于轨道上。
10、所述丝杆的前端部上固连有手轮。
11、本实用新型具有以下优点:本实用新型结构紧凑、缩短行走机器人的定位时间、极大提高行走机器人与定子屏蔽套定位效率、操作简单。
技术特征:
1.一种高效定位行走机器人的定位装置,其特征在于:它包括提升安装机构(7)和导向机构(8),提升安装机构(7)包括底座(9)和微调组件(10),所述底座(9)上固设有机架(11),机架(11)的右侧滑动安装有升降板(12),机架(11)的上端部旋转安装有定向轮(13),机架(11)的左侧设置有自锁绞盘(14),自锁绞盘(14)上的钢绳(15)绕过定向轮(13)且固设于升降板(12)上,所述微调组件(10)设置于升降板(12)的顶表面上;
2.根据权利要求1所述的一种高效定位行走机器人的定位装置,其特征在于:所述底座(9)的底表面上设置有多个万向轮。
3.根据权利要求1所述的一种高效定位行走机器人的定位装置,其特征在于:所述底座(9)的顶表面上还固设有位于机架(11)左侧的配重块(25)。
4.根据权利要求1所述的一种高效定位行走机器人的定位装置,其特征在于:所述定位块(22)为橡胶块。
5.根据权利要求1所述的一种高效定位行走机器人的定位装置,其特征在于:三个连接架(19)之间还固设有右侧环形板(27),右侧环形板(27)设置于升降板(12)的右侧。
6.根据权利要求1所述的一种高效定位行走机器人的定位装置,其特征在于:所述左侧环形板(17)、中间环形板(18)和右侧环形板(27)相互平行设置。
7.根据权利要求1所述的一种高效定位行走机器人的定位装置,其特征在于:所述微调组件(10)包括平台(28)、固设于升降板(12)顶表面上的两个安装座、固设于升降板(12)顶表面上的轨道(29),两个安装座之间旋转安装有纵向设置的丝杆(30),丝杆(30)上螺纹连接有螺母(31),所述平台(28)固设于螺母(31)的顶表面上,平台(28)的底表面上固设有滑块,滑块滑动安装于轨道(29)上。
8.根据权利要求7所述的一种高效定位行走机器人的定位装置,其特征在于:所述丝杆(30)的前端部上固连有手轮(32)。
技术总结
本技术公开了一种高效定位行走机器人的定位装置,本技术涉及行走机器人与定子屏蔽套定位的技术领域,它包括提升安装机构和导向机构,提升安装机构包括底座和微调组件,底座上固设有机架,机架的右侧滑动安装有升降板,机架的左侧设置有自锁绞盘,自锁绞盘上的钢绳绕过定向轮且固设于升降板上,微调组件设置于升降板的顶表面上;导向机构设置于微调组件的平台上,导向机构包括固设于平台顶表面上的支架,三个连接架的内端面上沿其长度方向均固设有导轨,三个导轨的右端部均固设有喇叭口,三个喇叭口的外端面上均固设有定位块。本技术的有益效果是:缩短行走机器人的定位时间、极大提高行走机器人与定子屏蔽套定位效率、操作简单。
技术研发人员:张余,李大伟,阎旭,秦东兴,严寒冰
受保护的技术使用者:四川同人精工科技有限公司
技术研发日:20230407
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!