一种基于OpenCV的防疫机器人
本技术涉及防疫设备,特别是涉及一种基于opencv的防疫机器人。
背景技术:
1、流感高发季节合理的防疫措施能够有效避免重点人群感染疾病;现有技术中,一般在较为封闭的场所建议佩戴口罩降低传染,同时会安排工作人员定时定点进行喷洒消毒液等方式进行消杀,降低疾病的传染几率,减少人员感染流感的风险;而通过人工喷洒消杀较为费时费力,同时人员主观工作过程中难免会出现消杀不彻底的现象,存在病毒传播的风险。
技术实现思路
1、本实用新型目的是针对背景技术中存在的问题,提出一种基于opencv的防疫机器人,通过机器人进行消杀同时提醒人员佩戴口罩,降低病毒传播风险。
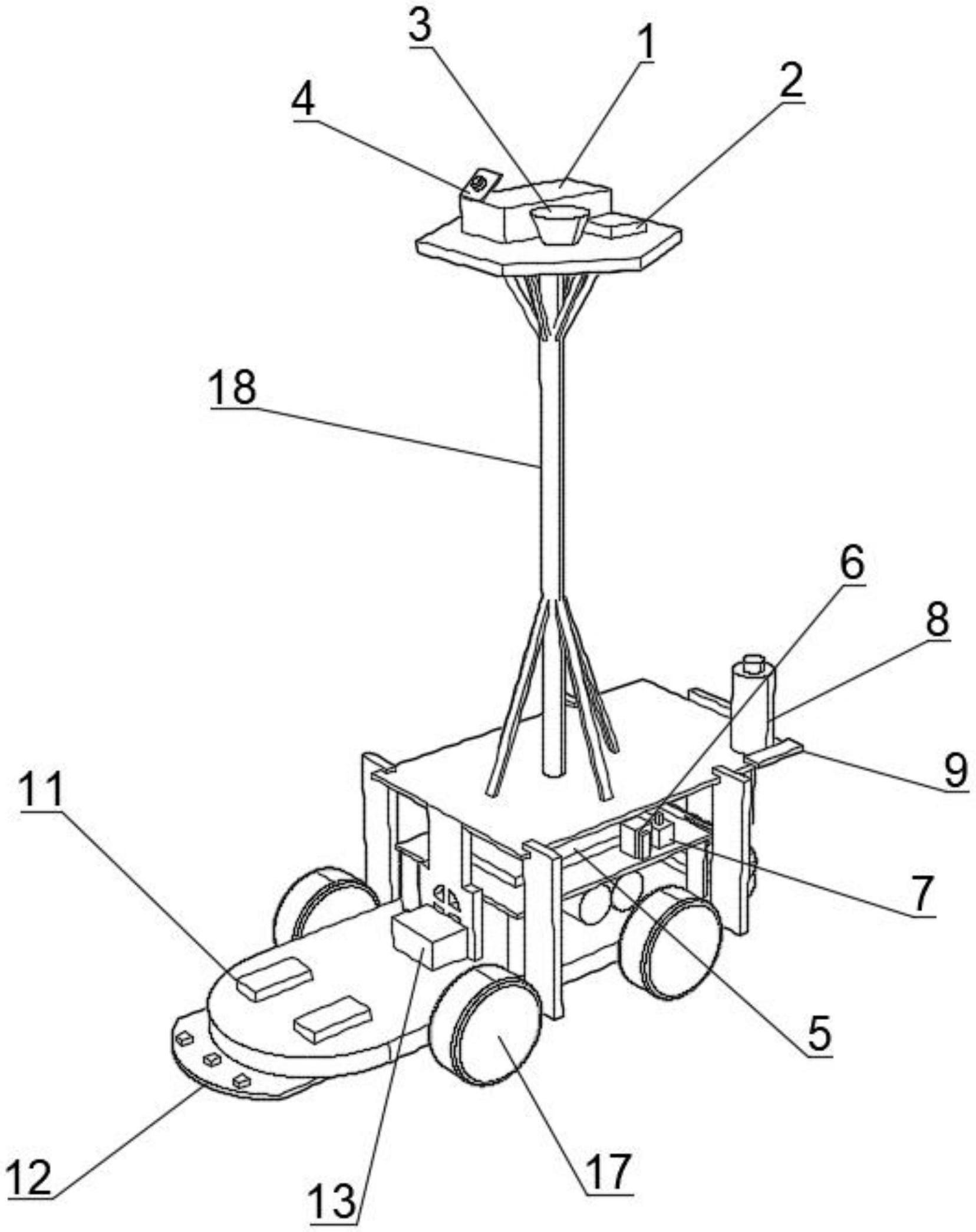
2、本实用新型的技术方案,一种基于opencv的防疫机器人,包括车体、口罩识别模块和消毒模块,车体的前端集成红外避障模块;车体前部设置凸出的安装板,安装板上设置红外循迹模块;
3、车体中部沿着竖直方向设置安装架;安装架的底部设置上下两层安装区;安装区上部集成单片机、红外接收管和开关;安装区的下部设置供电单元;车体的尾部设置继电器;红外接收管接收红外遥控信号并与单片机信号连接;
4、安装架的顶部中间位置设置支撑杆,支撑杆的顶部设置云台;云台上集成树莓派控制盒、语音播报模块、扬声器和摄像头;通过摄像头和树莓派控制盒构成口罩识别模块,识别用户是否佩戴口罩,并通过扬声器播报提示音;树莓派控制盒内集成树莓派4b和供电电源;
5、车体的左右两侧设置对称的车轮;树莓派控制盒与单片机信号连接;单片机控制红外避障模块、红外循迹模块以及消毒模块运行。
6、优选的,还包括车载mp3遥控器,车载mp3遥控器通过红外接收管与单片机信号连接,控制机器人切换功能。
7、优选的,消毒模块包括喷洒模组和紫外模组。
8、优选的,喷洒模组包括储液瓶和超声波加湿器,储液瓶存储消毒液;超声波加湿器的出口处设置雾化片;超声波加湿器通过继电器与单片机信号连接;储液瓶向超声波加湿器供液,进行喷雾。
9、优选的,紫外模组包括两组对称的紫外线灯带,紫外线灯带设置在车体的底部。
10、优选的,支撑杆的顶部和底部均设置多组稳定杆。
11、优选的,供电单元为车轮供电提供动力;左右两侧的车轮独立控制,单片机控制两侧车轮正反转控制车体左右运动调整方向。
12、优选的,红外避障模块为hj-ir2红外避障模块;hj-ir2红外避障模块检测前方存在障碍时输出低电平,无障碍时输出高电平;检测信号发送至单片机。
13、优选的,红外循迹模块为三路红外循迹模块。
14、优选的,口罩识别模块通过opencv、tensorflow环境,基于ssd算法,识别检测目标是否佩戴口罩。
15、与现有技术相比,本实用新型具有如下有益的技术效果:
16、本实用新型预先在规划路径上粘贴黑色胶布,机器人通过红外寻迹模块沿着黑色胶布运行;在运行过程中可通过红外避障模块进行避障;同时基于树莓派控制盒内置的口罩识别模块,识别过往人员是否佩戴口罩,并通过语音播报模块和扬声器进行播放提示音;
17、此外本实用新型搭载消毒模块,消毒模块包括喷洒模组和紫外模组;在机器人运行过程中将消毒液雾化成小颗粒,并沿着运行路径进行喷洒;同时底部的紫外线灯带可同步进行消毒,与人工进行消杀工作相比更加节能环保节约人力,提高效率。
技术特征:
1.一种基于opencv的防疫机器人,包括车体(16)、口罩识别模块和消毒模块,其特征在于,车体(16)的前端集成红外避障模块(11);车体(16)前部设置凸出的安装板,安装板上设置红外循迹模块(12);
2.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,还包括车载mp3遥控器,车载mp3遥控器通过红外接收管(6)与单片机(5)信号连接,控制机器人切换功能。
3.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,消毒模块包括喷洒模组和紫外模组。
4.根据权利要求3所述的一种基于opencv的防疫机器人,其特征在于,喷洒模组包括储液瓶(8)和超声波加湿器(9),储液瓶(8)存储消毒液;超声波加湿器(9)的出口处设置雾化片;超声波加湿器(9)通过继电器(10)与单片机(5)信号连接;储液瓶(8)向超声波加湿器(9)供液,进行喷雾。
5.根据权利要求3所述的一种基于opencv的防疫机器人,其特征在于,紫外模组包括两组对称的紫外线灯带(14),紫外线灯带(14)设置在车体(16)的底部。
6.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,支撑杆(18)的顶部和底部均设置多组稳定杆。
7.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,供电单元(15)为车轮(17)供电提供动力;左右两侧的车轮(17)独立控制,单片机(5)控制两侧车轮(17)正反转控制车体(16)左右运动调整方向。
8.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,红外避障模块(11)为hj-ir2红外避障模块;hj-ir2红外避障模块检测前方存在障碍时输出低电平,无障碍时输出高电平;检测信号发送至单片机(5)。
9.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,红外循迹模块(12)为三路红外循迹模块。
10.根据权利要求1所述的一种基于opencv的防疫机器人,其特征在于,口罩识别模块通过opencv、tensorflow环境,基于ssd算法,识别检测目标是否佩戴口罩。
技术总结
本技术涉及防疫设备技术领域,特别是涉及一种基于OpenCV的防疫机器人,包括车体、口罩识别模块和消毒模块,车体的前端集成红外避障模块;安装区上部集成单片机、红外接收管和开关;安装区的下部设置供电单元;红外接收管接收红外遥控信号并与单片机信号连接;安装架的顶部中间位置设置支撑杆,支撑杆的顶部设置云台;云台上集成树莓派控制盒、语音播报模块、扬声器和摄像头;车体的左右两侧设置对称的车轮;树莓派控制盒与单片机信号连接;单片机控制红外避障模块、红外循迹模块以及消毒模块运行。本技术通过机器人进行消杀同时提醒人员佩戴口罩,降低病毒传播风险,与人工进行消杀工作相比更加节能环保节约人力,提高效率。
技术研发人员:徐异,张立珍,董超,吴彤,朱良宇,刘骁汉,王锦
受保护的技术使用者:东南大学成贤学院
技术研发日:20230410
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!