用于机械手的上电工装与光伏组件拆卸机构的制作方法
本技术涉及光伏电池,特别是涉及一种用于机械手的上电工装与光伏组件拆卸机构。
背景技术:
1、光伏组件即太阳能组件,在生产过程中需要经过产品测试检验,其中检测项目中就有对光伏组件通电测试,在测试过程中采用上电工装搭配光伏组件使用,通过上电工装与光伏组件接线盒公母头接插组成电路回路,再由上电工装两端铜块上电,完成对光伏组件通电测试。
2、在之前的生产过程中由于上电工装与光伏组件接线盒公母头一直是由人工拔出的,这样做费时费力,在现场测试时一个工人从拔出接头到拿走上电工装总计需要12秒左右。此种完全由人工作业实现将光伏组件接线盒接头从上电工装的插口中拔出,再由人工将上电工装转移至设定位置的方式,效率低下,难以满足生产需求,且导致劳动强度较高,提高了人力成本
技术实现思路
1、鉴于以上所述现有技术的缺点,本实用新型要解决的技术问题在于提供一种能提高作业效率、降低人力成本的用于机械手的上电工装与光伏组件拆卸机构。
2、为实现上述目的,本实用新型提供一种用于机械手的上电工装与光伏组件拆卸机构,包括用于与机械手手臂相连接的架体、安装在架体上的工装挡块、安装在架体上的拔出驱动装置、及安装在拔出驱动装置上的接头夹爪,所述接头夹爪能夹紧和松开光伏组件的接线盒接头,所述拔出驱动装置能带动接头夹爪沿远离工装挡块方向运动。
3、进一步地,所述用于机械手的上电工装与光伏组件拆卸机构,还包括工装夹持模组,所述工装夹持模组包括安装在架体上的工装夹持驱动装置、及两个与工装夹持驱动装置相连接的运动板,两个所述运动板上均设有夹块,所述工装夹持驱动装置能带动两个运动板沿相互靠近和远离方向移动。
4、进一步地,所述工装夹持驱动装置采用气缸。
5、进一步地,所述夹块上设有夹持槽,所述夹持槽用于与上电工装的管体相卡合。
6、进一步地,所述工装夹持模组还包括安装在两个所述运动板上的工装感应传感器。
7、进一步地,所述工装感应传感器采用激光对射光电传感器。
8、进一步地,所述接头夹爪包括与拔出驱动装置相连接的夹爪驱动装置、及两个与夹爪驱动装置相连接的夹爪块,所述夹爪驱动装置能带动两个所述夹爪块沿相互靠近和远离方向运动。
9、进一步地,所述夹爪驱动装置采用气缸。
10、进一步地,所述用于机械手的上电工装与光伏组件拆卸机构,还包括安装在架体上的接头感应传感器,所述接头感应传感器位于夹爪块和工装挡块之间。
11、进一步地,所述拔出驱动装置采用气缸。
12、如上所述,本实用新型涉及的用于机械手的上电工装与光伏组件拆卸机构,具有以下有益效果:
13、本用于机械手的上电工装与光伏组件拆卸机构在使用时,将架体与机械手手臂相连接,机械手手臂带动架体及整个拆卸机构运动至接头夹爪与光伏组件的接线盒接头相对应位置,此时工装挡块与上电工装的被阻挡部位相对应,接头夹爪动作、并夹紧接线盒接头,拔出驱动装置带动接头夹爪及接线盒接头沿远离工装挡块方向运动,直至将接线盒接头从上电工装上拔出,实现将两者拆卸开,此种拆卸方式相比于人工作业,提高了作业效率,降低了劳动强度,节约了人力成本。
技术特征:
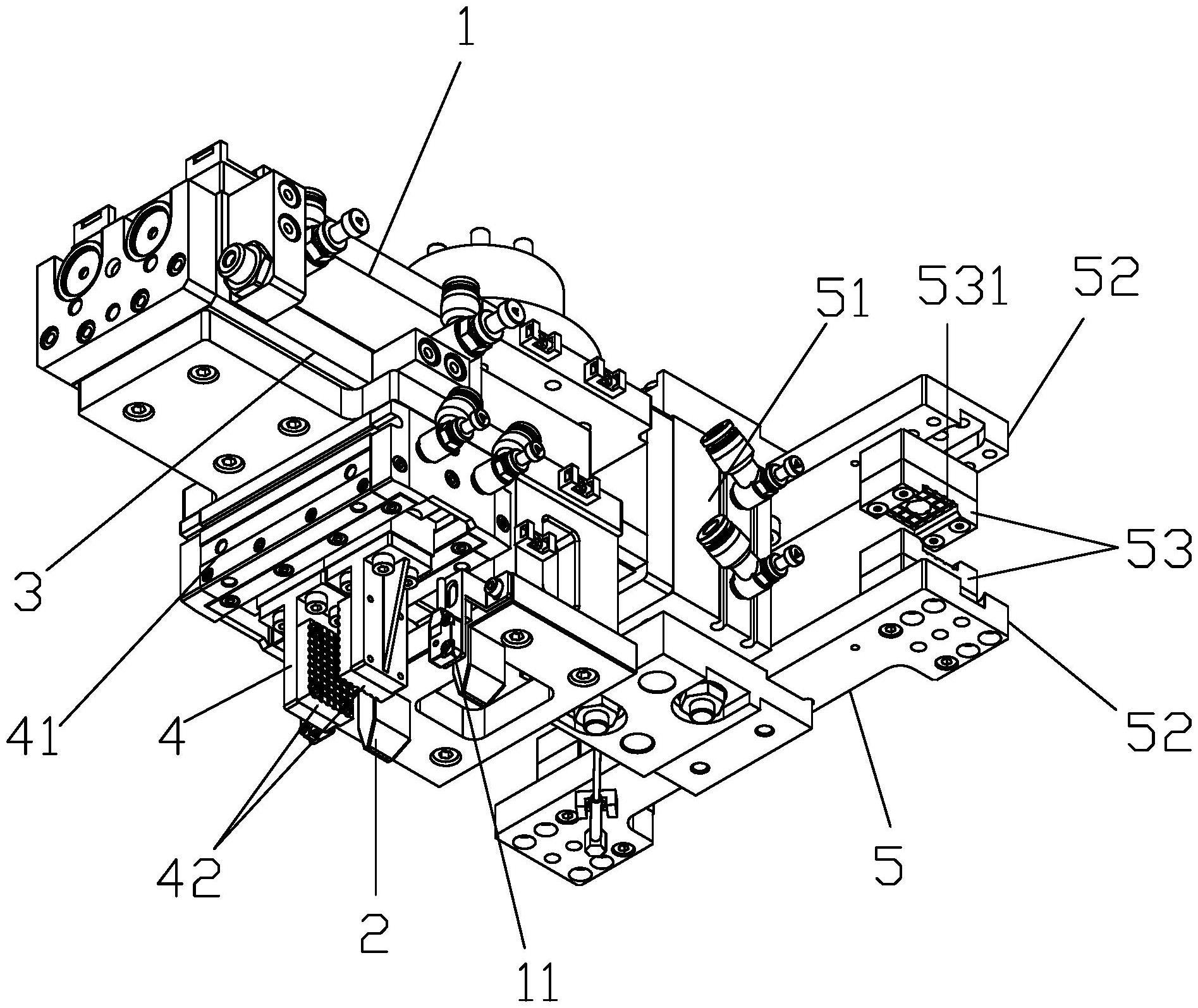
1.一种用于机械手的上电工装与光伏组件拆卸机构,其特征在于,包括用于与机械手手臂相连接的架体(1)、安装在架体(1)上的工装挡块(2)、安装在架体(1)上的拔出驱动装置(3)、及安装在拔出驱动装置(3)上的接头夹爪(4),所述接头夹爪(4)能夹紧和松开光伏组件的接线盒接头,所述拔出驱动装置(3)能带动接头夹爪(4)沿远离工装挡块(2)方向运动。
2.根据权利要求1所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,还包括工装夹持模组(5),所述工装夹持模组(5)包括安装在架体(1)上的工装夹持驱动装置(51)、及两个与工装夹持驱动装置(51)相连接的运动板(52),两个所述运动板(52)上均设有夹块(53),所述工装夹持驱动装置(51)能带动两个运动板(52)沿相互靠近和远离方向移动。
3.根据权利要求2所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述工装夹持驱动装置(51)采用气缸。
4.根据权利要求2所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述夹块(53)上设有夹持槽(531),所述夹持槽(531)用于与上电工装(6)的管体(61)相卡合。
5.根据权利要求2所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述工装夹持模组(5)还包括安装在两个所述运动板(52)上的工装感应传感器(54)。
6.根据权利要求5所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述工装感应传感器(54)采用激光对射光电传感器。
7.根据权利要求1所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述接头夹爪(4)包括与拔出驱动装置(3)相连接的夹爪驱动装置(41)、及两个与夹爪驱动装置(41)相连接的夹爪块(42),所述夹爪驱动装置(41)能带动两个所述夹爪块(42)沿相互靠近和远离方向运动。
8.根据权利要求7所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述夹爪驱动装置(41)采用气缸。
9.根据权利要求7所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,还包括安装在架体(1)上的接头感应传感器(11),所述接头感应传感器(11)位于夹爪块(42)和工装挡块(2)之间。
10.根据权利要求1所述用于机械手的上电工装与光伏组件拆卸机构,其特征在于,所述拔出驱动装置(3)采用气缸。
技术总结
本技术提供一种用于机械手的上电工装与光伏组件拆卸机构,包括用于与机械手手臂相连接的架体、安装在架体上的工装挡块、安装在架体上的拔出驱动装置、及安装在拔出驱动装置上的接头夹爪,接头夹爪能夹紧和松开光伏组件的接线盒接头,拔出驱动装置能带动接头夹爪沿远离工装挡块方向运动。机械手手臂带动架体及整个拆卸机构运动至接头夹爪与光伏组件的接线盒接头相对应位置,此时工装挡块与上电工装的被阻挡部位相对应,接头夹爪夹紧接线盒接头,拔出驱动装置带动接头夹爪及接线盒接头沿远离工装挡块方向运动,直至将接线盒接头从上电工装上拔出,此种拆卸方式相比于人工作业,提高了作业效率,降低了劳动强度,节约了人力成本。
技术研发人员:王振
受保护的技术使用者:上海欧普泰科技创业股份有限公司
技术研发日:20230418
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!