一种进出真空箱机械手装置的制作方法
本技术具体涉及一种进出真空箱机械手装置。
背景技术:
1、在真空氦检漏过程中,需要将待检漏的产品送入真空箱,以氦气作为示踪气体,在真空箱内抽真空后再将氦气充入工件,然后通过氦检漏仪检测工件的泄露情况。
2、在自动化检漏前,需要将完成上一工序的工件送入真空箱,在真空箱内完成密封、检漏工序后,再将工件移出真空箱送至下一工位,而现有技术中却缺少有效的装置来自动完成这个工作,因此,提供一种适用于产品自动化物流转运的进出真空箱机械手装置具有很大的意义。
技术实现思路
1、基于以上问题,本实用新型的目的在于提供一种进出真空箱机械手装置,适用于尺寸薄、面积大、重量大的薄板壳体工件进出真空箱的自动化流转运。
2、为了实现以上目的,本实用新型采用的技术方案为:一种进出真空箱机械手装置,其特征在于:
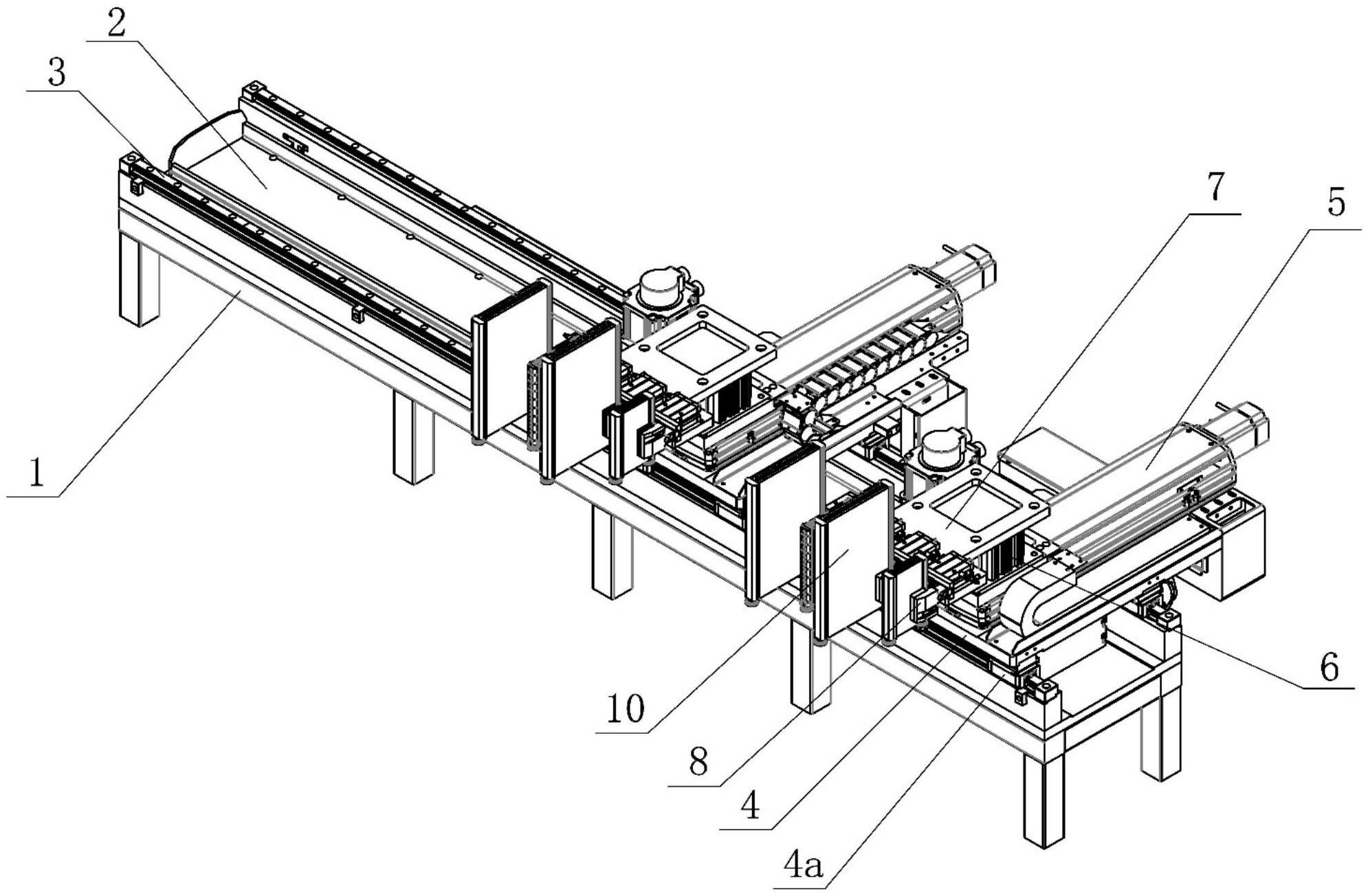
3、它包括机械手架台、左右移动电缸、导轨、机械手组件;
4、所述机械手架台上安装有左右移动电缸以及一对平行的导轨;
5、所述机械手组件包括机械手组件底板、前后移动电缸、升降气缸、机械手安装板、用于夹持工件的工件夹爪;
6、所述机械手组件底板的底部安装有与导轨配合的底板滑块,机械手组件底板的上部从下至上依次安装有前后移动电缸、升降气缸和机械手安装板,机械手安装板的外侧安装有工件夹爪;
7、所述机械手组件为结构相同的两套,分别设置于进箱工位与真空箱之间、真空箱与激光打印二维码工位之间。
8、进一步,机械手安装板的外侧安装的工件夹爪为多个。
9、进一步,每个工件夹爪的爪心中部安装有夹爪滚轮。
10、进一步,夹爪滚轮为多个,通过滚轮销轴安装于滚轮架上,滚轮架与机械手安装板的外侧固定连接。
11、本实用新型的有益效果为:
12、本实用新型提供的进出真空箱机械手装置,通过两套可左右、前后移动及上下升降的机械手组件,可一次性将上一工序的多个不同尺寸的工件自动送入真空箱,在真空箱内完成密封、检漏工序后,再将工件自动移出真空箱送至下一工位,实现尺寸薄、面积大、重量大的薄板壳体工件进出真空箱的自动化流转运,大大提高了工件在生产线上的转运效率。
技术特征:
1.一种进出真空箱机械手装置,其特征在于:
2.根据权利要求1所述的进出真空箱机械手装置,其特征在于:机械手安装板(7)的外侧安装的工件夹爪(8)为多个。
3.根据权利要求1或2所述的进出真空箱机械手装置,其特征在于:所述每个工件夹爪(8)的爪心中部安装有夹爪滚轮(9)。
4.根据权利要求3所述的进出真空箱机械手装置,其特征在于:所述夹爪滚轮(9)为多个,通过滚轮销轴(11)安装于滚轮架(12)上,滚轮架(12)与机械手安装板(7)的外侧固定连接。
技术总结
一种进出真空箱机械手装置,包括机械手架台(1)、左右移动电缸(2)、导轨(3)、机械手组件;机械手架台(1)上安装有左右移动电缸(2)以及一对平行的导轨(3);机械手组件底板(4)的底部安装有与导轨(3)配合的底板滑块(4a),上部从下至上依次安装有前后移动电缸(5)、升降气缸(6)和机械手安装板(7),机械手安装板(7)的外侧安装有工件夹爪(8),机械手组件为结构相同的两套,分别设置于进箱工位与真空箱之间、真空箱与激光打印二维码工位之间,机械手安装板(7)的外侧安装的工件夹爪(8)为多个。本装置特别适用于尺寸薄、面积大、重量大的薄板壳体工件进出真空箱的自动化流转运。
技术研发人员:张果,蓝峰,李健,瞿骑龙,艾仕义,钟林,黄智伟
受保护的技术使用者:爱发科东方检测技术(成都)有限公司
技术研发日:20230428
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!