一种气动机械手变幅臂限位机构的制作方法
本技术涉及一种气动机械手变幅臂限位机构,属于变幅臂设备。
背景技术:
1、在多晶硅生产过程中需要使用到气动助力取棒机械手,气动助力取棒机械手的变幅臂由于工作需要上下起升时,需要限位机构对其进行限位作用。
2、如图1所示现有技术存在多个技术缺陷:
3、1、限位机构的杆体采用螺杆,限位块与其螺纹配合,存在安装拆卸慢、不易调节,不易固定的缺陷;
4、2、杆体的导向套上有两个互相垂直交叉的孔,两孔的轴线在同一水平面内,一个用于通过杆体,一个用于安装固定支架的两个对称的固定轴,受到杆体的阻碍导致固定轴并非一整根穿过导向套,而是固定支架一侧各焊接有一个固定轴,因此存在对焊接的地方进行打磨、补漆防腐处理步骤,随着使用过程中存在磨损、腐蚀,磨损的金属或者金属氧化物飘落会污染硅棒,并且因为现有结构采用焊接,因此如果漏装了限位块,就很难重新安装;
5、3、杆体一端套接在变幅臂的拉杆的轴套上,开孔较大,随着使用会磨损轴套上的涂层,进而导致金属或者金属氧化物杂质飘落,污染硅棒。
技术实现思路
1、针对上述现有技术存在的问题,本实用新型提供一种气动机械手变幅臂限位机构,其结构简单,安装快速,方便维修,同时通过销轴固定,在相对于现有设备减小磨损的同时安装拆卸方便。
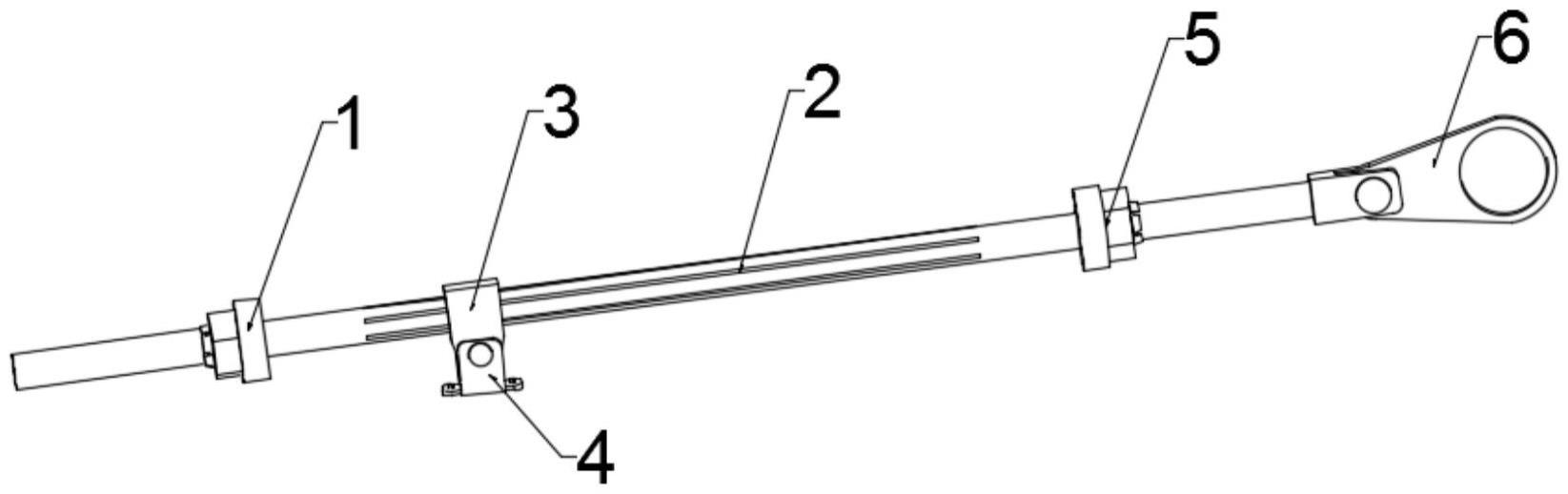
2、为了实现上述目的,一种气动机械手变幅臂限位机构,包括杆体、套接在杆体上的导向套、安装在变幅臂上用于固定导向套的固定支架、安装在杆体上且能够自锁的前限位块与后限位块以及转动设置在杆体一端的拉板,所述导向套上开设有分别用于杆体与固定支架销轴穿过的两个通孔,所述杆体的一端设置有连接叉,所述拉板的一端通过销轴与连接叉连接另一端固定套接在变幅臂的固定杆的轴套上。
3、优选地,所述导向套内壁上设置有若干个凸起的圆珠。
4、优选地,所述圆珠滚动设置导向套的内壁上。
5、优选地,所述杆体侧壁上均匀开设有若干个轴向槽,轴向槽与圆珠位置对应。
6、优选地,所述前限位块与后限位块为自锁紧扣。
7、优选地,所述固定支架的销轴孔与拉板的销轴孔内均设置有轴套。
8、与现有技术对比,本实用新型的有益效果为:
9、1、采用销轴固定,避免焊接,减少制作工序,并且减少现有技术的磨损从而减少对多晶硅棒的污染;
10、2、本申请结构简单,安装快速,方便维修;
11、3、通过在杆体外壁设置轴向槽与导向套的圆珠配合,既能加强杆体强度、降低杆体自重又能减小摩擦降低磨损。
技术特征:
1.一种气动机械手变幅臂限位机构,其特征在于,包括杆体(2)、套接在杆体(2)上的导向套(3)、安装在变幅臂上用于固定导向套(3)的固定支架(4)、安装在杆体(2)上且能够自锁的前限位块(1)与后限位块(5)以及转动设置在杆体(2)一端的拉板(6),所述导向套(3)上开设有分别用于杆体(2)与固定支架(4)销轴穿过的两个通孔,所述杆体(2)的一端设置有连接叉(2-1),所述拉板(6)的一端通过销轴与连接叉(2-1)连接另一端固定套接在变幅臂的固定杆的轴套上。
2.根据权利要求1所述的一种气动机械手变幅臂限位机构,其特征在于,所述导向套(3)内壁上设置有若干个凸起的圆珠。
3.根据权利要求2所述的一种气动机械手变幅臂限位机构,其特征在于,所述圆珠滚动设置导向套(3)的内壁上。
4.根据权利要求3所述的一种气动机械手变幅臂限位机构,其特征在于,所述杆体(2)侧壁上均匀开设有若干个轴向槽,轴向槽与圆珠位置对应。
5.根据权利要求1所述的一种气动机械手变幅臂限位机构,其特征在于,所述前限位块(1)与后限位块(5)为自锁紧扣。
6.根据权利要求1所述的一种气动机械手变幅臂限位机构,其特征在于,所述固定支架(4)的销轴孔与拉板(6)的销轴孔内均设置有轴套。
技术总结
本技术公开了一种气动机械手变幅臂限位机构,包括杆体、套接在杆体上的导向套、安装在变幅臂上用于固定导向套的固定支架、安装在杆体上且能够自锁的前限位块与后限位块以及转动设置在杆体一端的拉板,所述导向套上开设有分别用于杆体与固定支架销轴穿过的两个通孔,所述杆体的一端设置有连接叉,所述拉板的一端通过销轴与连接叉连接另一端固定套接在变幅臂的固定杆的轴套上。本技术其结构简单,安装快速,方便维修,同时通过销轴固定,在相对于现有设备减小磨损的同时安装拆卸方便。
技术研发人员:张鹏程,徐晨,张娟
受保护的技术使用者:徐州川一工程机械有限公司
技术研发日:20230504
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!