一种拼插组合式编程机器人连接件的制作方法
本技术涉及机器人,尤其涉及一种拼插组合式编程机器人连接件。
背景技术:
1、编程机器人有实体编程和图形编程,可以去自由地定义机器人的行走路线,人脸识别,语音识别,图像文字处理等。
2、现有的机器人的关节臂一般由两个关节杆组成,两个关节杆之间可以进行转动并可以停止在既定的角度,但是现有的两个关节杆之间一般是通过螺栓进行连接,通过两个关节杆之间的摩擦力来对关节杆的角度实现固定,但是由于螺栓容易松动,在螺栓松动后,两个关节杆之间的摩擦力就会很小,无法对关节杆实现固定,因此针对该问题提出相应的改进,通过卡接组件与卡槽形成配合,来实现第一关节杆和第二关节杆之间的固定,并非通过二者之间的摩擦力实现固定,从而有效避免螺栓出现松动后,关节杆则无法被固定的情况。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种拼插组合式编程机器人连接件。
2、为了实现上述目的,本实用新型采用了如下技术方案:
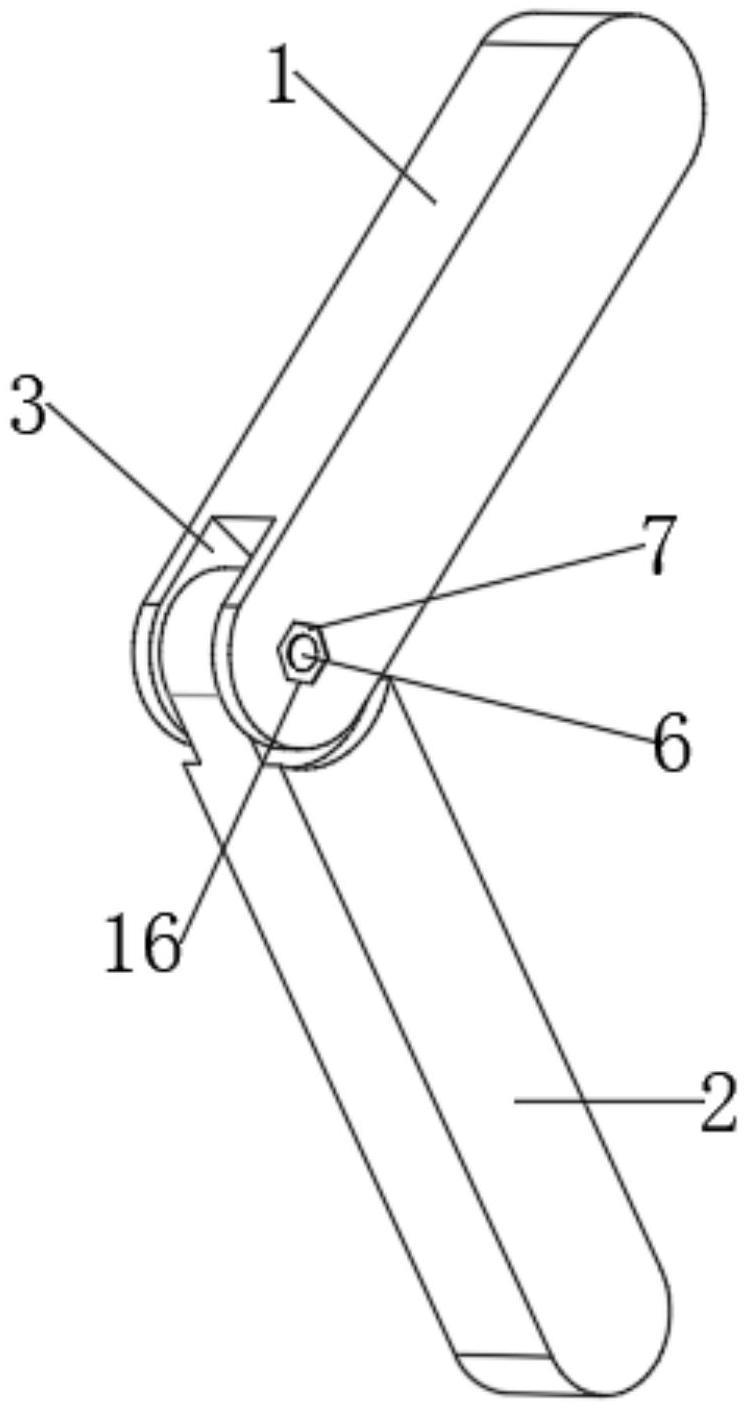
3、一种拼插组合式编程机器人连接件,包括第一关节杆和第二关节杆,所述第一关节杆的底端开设有供第二关节杆的端部插入的活动口,第一关节杆和第二关节杆的相邻端分别开设有第一圆孔和第二圆孔,第一圆孔和第二圆孔内共同插设有螺栓,螺栓上螺纹连接有螺母,第二关节杆的顶端开设有多个环形阵列分布的第三圆孔,第三圆孔内设置有卡接组件,卡接组件包括一对相向分布的卡块以及位于两个卡块之间的弹簧,卡块的外端面为球面结构,活动口的两侧内壁均开设有多个环形阵列分布的可与卡块的球面相抵的卡槽。
4、优选的,所述卡块的内端开设有圆形的凹槽,凹槽的侧壁开设有螺纹槽,弹簧的两端均固定有与凹槽相匹配的圆盘,圆盘的外端设有一体成型的与螺纹槽形成螺纹连接的螺柱。
5、优选的,所述第一关节杆的底端的一侧开设有与第一圆孔相通的定位槽,定位槽与螺母形状相匹配。
6、优选的,所述第一关节杆的底端的一侧开设有圆形的并与第一圆孔相通的沉槽。
7、优选的,所述沉槽内插入有可套在螺栓上的并与沉槽内壁相贴的定位圈。
8、优选的,所述定位圈由橡胶材料制成。
9、优选的,所述定位圈的圆周外壁开设有多个环形阵列分布的滑口。
10、本实用新型的有益效果为:
11、1、该装置中设置有卡接组件,当第二关节杆转动时,同步带动卡接组件转动,在转动至既定角度后,卡接组件上的弹簧推动两个卡块顺着第三圆孔进行相互远离的移动,而后卡块进入到卡槽内,将第二关节杆在该角度进行固定,从而有效避免当螺栓出现一定程度松动时,第二关节杆和第一关节杆之间则无法固定的情况。
12、2、该装置中设置有圆盘和螺柱,在安装卡接组件时,先将弹簧两端的圆盘分别拧紧到卡块上的螺纹槽内,而后将卡接组件直接逐个插入第三圆孔内,从而方便对卡接组件进行安装。
13、3、该装置中设置有与螺母形状相匹配的定位槽,在安装时,将螺母塞入定位槽内,在拧紧螺栓时,由于受到定位槽的限制,螺母无法转动,从而使得对于螺栓的安装过程方便,并且在安装后螺母完全位于定位槽内部,避免其凸出在外面。
14、4、该装置中设置有与第一圆孔相通的沉槽,螺栓在安装完毕后,会完全位于沉槽内部,从而避免螺栓凸出在外面。
15、5、该装置中设置有定位圈,在将螺栓拧紧后,将定位圈插入沉槽,使其套在螺栓上,从而有效避免螺栓松动,定位圈由橡胶材料制成,将定位圈塞入后,定位圈受到一定程度的挤压,使其与沉槽之间的摩擦力增加,从而避免定位圈脱落,通过滑口可进一步提高定位圈与沉槽之间的摩擦力,从而防止定位圈脱落。
技术特征:
1.一种拼插组合式编程机器人连接件,包括第一关节杆(1)和第二关节杆(2),其特征在于,所述第一关节杆(1)的底端开设有供第二关节杆(2)的端部插入的活动口(3),第一关节杆(1)和第二关节杆(2)的相邻端分别开设有第一圆孔(4)和第二圆孔(5),第一圆孔(4)和第二圆孔(5)内共同插设有螺栓(6),螺栓(6)上螺纹连接有螺母(7),第二关节杆(2)的顶端开设有多个环形阵列分布的第三圆孔(8),第三圆孔(8)内设置有卡接组件,卡接组件包括一对相向分布的卡块(9)以及位于两个卡块(9)之间的弹簧(10),卡块(9)的外端面为球面结构,活动口(3)的两侧内壁均开设有多个环形阵列分布的可与卡块(9)的球面相抵的卡槽(11)。
2.根据权利要求1所述的一种拼插组合式编程机器人连接件,其特征在于,所述卡块(9)的内端开设有圆形的凹槽(12),凹槽(12)的侧壁开设有螺纹槽(13),弹簧(10)的两端均固定有与凹槽(12)相匹配的圆盘(14),圆盘(14)的外端设有一体成型的与螺纹槽(13)形成螺纹连接的螺柱(15)。
3.根据权利要求1所述的一种拼插组合式编程机器人连接件,其特征在于,所述第一关节杆(1)的底端的一侧开设有与第一圆孔(4)相通的定位槽(16),定位槽(16)与螺母(7)形状相匹配。
4.根据权利要求1所述的一种拼插组合式编程机器人连接件,其特征在于,所述第一关节杆(1)的底端的一侧开设有圆形的并与第一圆孔(4)相通的沉槽(17)。
5.根据权利要求4所述的一种拼插组合式编程机器人连接件,其特征在于,所述沉槽(17)内插入有可套在螺栓(6)上的并与沉槽(17)内壁相贴的定位圈(18)。
6.根据权利要求5所述的一种拼插组合式编程机器人连接件,其特征在于,所述定位圈(18)由橡胶材料制成。
7.根据权利要求6所述的一种拼插组合式编程机器人连接件,其特征在于,所述定位圈(18)的圆周外壁开设有多个环形阵列分布的滑口(19)。
技术总结
本技术公开了一种拼插组合式编程机器人连接件,包括第一关节杆和第二关节杆,所述第一关节杆的底端开设有活动口,第一关节杆和第二关节杆的相邻端分别开设有第一圆孔和第二圆孔,第一圆孔和第二圆孔内共同插设有螺栓,螺栓上螺纹连接有螺母,第二关节杆的顶端开设有多个第三圆孔,第三圆孔内设置有卡接组件,卡接组件包括一对相向分布的卡块以及弹簧,卡块的外端面为球面结构,活动口的两侧内壁均开设有多个可与卡块的球面相抵的卡槽。本技术通过卡接组件与卡槽形成配合,来实现第一关节杆和第二关节杆之间的固定,并非通过二者之间的摩擦力实现固定,从而有效避免螺栓出现松动后,关节杆则无法被固定的情况。
技术研发人员:陈仁艺,王璐
受保护的技术使用者:深圳科睿国际教育科技有限公司
技术研发日:20230509
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!