一种移动机器人的路线避障机构的制作方法
本技术涉及移动机器人,具体为一种移动机器人的路线避障机构。
背景技术:
1、移动机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作,移动机器人的路线避障机构是机器人移动时重要机构。
2、针对于此,中国专利号cn216442545u提出了一种用于移动机器人的避障装置,通过设有的缓冲垫,当避障功能出现故障,机器人撞上障碍物时,缓冲垫可起到缓冲的功能,从而对机器人进行保护,当缓冲垫受到冲击力时,固定板将带动滑块在滑槽内滑动,同时对弹簧进行压缩,将撞击力进行抵消,从而实现机器人的缓冲功能,可更好的对其进行保护,提高了机器人的使用寿命,而以上专利中,移动机器人的路线避障机构在使用时,容易因为避障不及时造成机器人碰撞,导致移动机器人碰撞歪斜倾翻的隐患,降低移动机器人的路线避障机构的实用性,因此需要一种移动机器人的路线避障机构。
技术实现思路
1、为了解决上述问题,本实用新型的目的是提供一种移动机器人的路线避障机构,以解决上述背景技术中提出的问题。
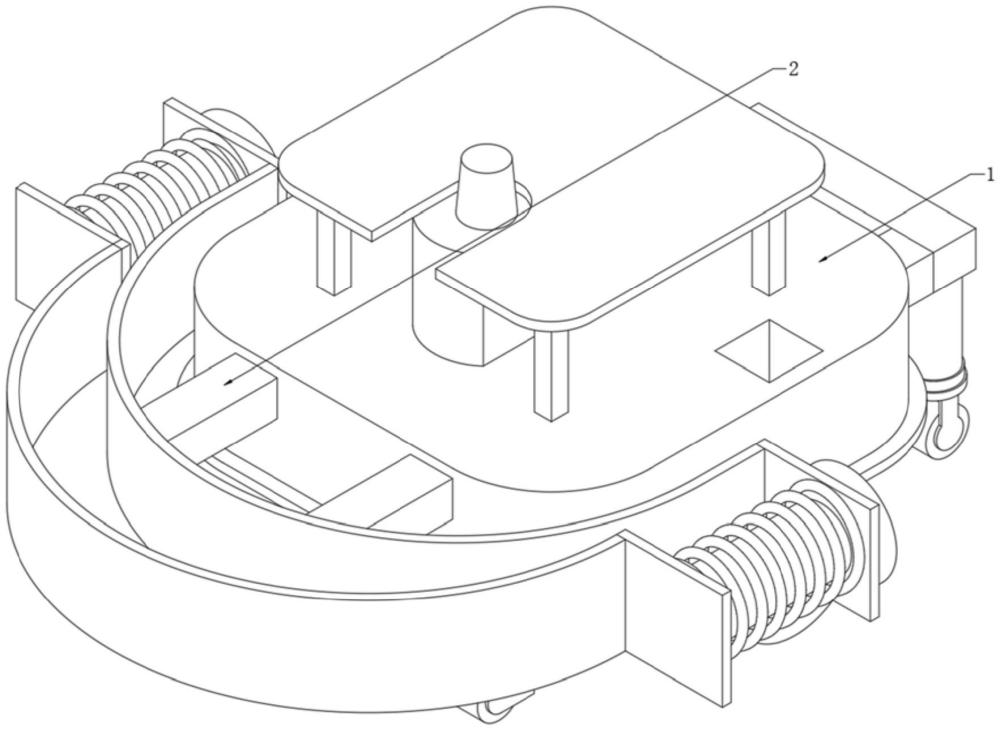
2、为实现上述目的,本实用新型提出了一种移动机器人的路线避障机构,包括移动机器人本体,所述移动机器人本体用作智能机器设备移动使用,所述移动机器人本体的中间位置固定设有辅助支撑机构,所述辅助支撑机构的一侧固定设有缓冲机构;
3、所述辅助支撑机构包括定位齿轮,所述定位齿轮外壁的一端啮合设有第一定位齿条,所述定位齿轮外壁的另一端啮合设有第二定位齿条,所述第一定位齿条的一侧固定设有第一定位环,所述第一定位环一侧的一端固定设有第一固定杆,所述第二定位齿条的一侧固定设有第二固定杆,所述第二固定杆一侧的两端均固定设有万向轮,所述第一固定杆的一侧和第二固定杆的一侧均与定位齿轮外壁的一侧接触。
4、在一个示例中,所述定位齿轮外壁的两端均固定设有防护环,所述定位齿轮外壁的中间位置固定设有固定环。
5、在一个示例中,所述第一定位齿条的一侧、第二定位齿条的一侧、第一固定杆的一侧和第二固定杆的一侧分别与两个防护环一侧的两端接触。
6、在一个示例中,所述缓冲机构包括第二定位环,所述第二定位环的两端均固定设有定位块,两个所述定位块的一侧均固定设有定位杆,两个所述定位杆外壁的一端均穿插设有弹簧,两个所述定位杆外壁的另一端均穿插设有固定块,两个所述定位杆的一端均固定设有限位块,两个所述固定块的一侧分别与第一定位环的两端固定连接。
7、在一个示例中,两个所述弹簧的两侧分别与两个固定块的一侧和两个定位块的一侧接触。
8、在一个示例中,两个所述防护环的两端均固定设有防护板,四个所述防护板的一侧均与移动机器人本体的内壁固定连接。
9、通过本实用新型提出的一种移动机器人的路线避障机构能够带来如下有益效果:
10、1、该一种移动机器人的路线避障机构,通过第一定位齿条的移动使得转动连接在移动机器人本体内壁的定位齿轮进行转动,使得啮合在定位齿轮外壁一端啮合的第二定位齿条进行啮合移动,通过两个防护环和固定环的定位保护,使得固定在第二定位齿条和第二固定杆一端的万向轮向相反的方向移动,使得万向轮支撑在移动机器人本体的另一侧降低导致移动机器人本体倾翻的问题,增加移动机器人的路线避障机构的实用性,提高移动机器人的路线避障机构的工作效率。
11、2、该一种移动机器人的路线避障机构,通过定位块和定位杆定位的第二定位环进行障碍接触,通过穿插在定位杆外壁的弹簧的弹性形变和限位块的定位,使得第一定位环、第一定位齿条和第一固定杆均向移动机器人本体的内壁移动,从而使得移动机器人本体得到缓冲保护,降低导致移动机器人本体发生碰撞损伤的隐患,增加移动机器人的安全性能。
技术特征:
1.一种移动机器人的路线避障机构,包括:
2.根据权利要求1所述的一种移动机器人的路线避障机构,其特征在于:所述定位齿轮(11)外壁的两端均固定设有防护环(12),所述定位齿轮(11)外壁的中间位置固定设有固定环(13)。
3.根据权利要求1所述的一种移动机器人的路线避障机构,其特征在于:所述第一定位齿条(2)的一侧、第二定位齿条(14)的一侧、第一固定杆(15)的一侧和第二固定杆(16)的一侧分别与两个防护环(12)一侧的两端接触。
4.根据权利要求1所述的一种移动机器人的路线避障机构,其特征在于:所述缓冲机构包括第二定位环(4),所述第二定位环(4)的两端均固定设有定位块(9),两个所述定位块(9)的一侧均固定设有定位杆(6),两个所述定位杆(6)外壁的一端均穿插设有弹簧(7),两个所述定位杆(6)外壁的另一端均穿插设有固定块(5),两个所述定位杆(6)的一端均固定设有限位块(8),两个所述固定块(5)的一侧分别与第一定位环(3)的两端固定连接。
5.根据权利要求4所述的一种移动机器人的路线避障机构,其特征在于:两个所述弹簧(7)的两侧分别与两个固定块(5)的一侧和两个定位块(9)的一侧接触。
6.根据权利要求2所述的一种移动机器人的路线避障机构,其特征在于:两个所述防护环(12)的两端均固定设有防护板(10),四个所述防护板(10)的一侧均与移动机器人本体(1)的内壁固定连接。
技术总结
本技术公开了一种移动机器人的路线避障机构,包括移动机器人本体,所述移动机器人本体用作智能机器设备移动使用,所述移动机器人本体的中间位置固定设有辅助支撑机构,所述辅助支撑机构的一侧固定设有缓冲机构;所述辅助支撑机构包括定位齿轮。本技术通过第一定位齿条的移动使得转动连接在移动机器人本体内壁的定位齿轮进行转动,使得啮合在定位齿轮外壁一端啮合的第二定位齿条进行啮合移动,使得固定在第二定位齿条和第二固定杆一端的万向轮向相反的方向移动,使得万向轮支撑在移动机器人本体的另一侧降低导致移动机器人本体倾翻的问题,增加移动机器人的路线避障机构的实用性,提高移动机器人的路线避障机构的工作效率。
技术研发人员:晁硕陽,吕启明,刘彪
受保护的技术使用者:道非科技(青岛)有限公司
技术研发日:20230512
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!