一种机器人第七轴进给系统
本技术涉及机器人,尤其是一种机器人第七轴进给系统。
背景技术:
1、机器人第七轴又称机器人行走轴、机器人轨道等,该机构能够增加机器人一个方向的轴向运动,实现机器人位置的柔性切换,扩大机器人作业半径,应用领域广泛,然而现有的机器人第七轴的进给轴的传动方式摩擦阻力大、稳定性差,而且不方便维护,极大的降低了机器人的工作效率。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种结构合理的机器人第七轴进给系统,直线运动导向与承载采用滚珠直线导轨,还使用通过联轴器将伺服电动机与滚珠丝杠直连的传动方式,经济性好,实用效果佳。
2、本实用新型所采用的技术方案如下:
3、一种机器人第七轴进给系统,包括:底座、垫块、底座上方中部的驱动装置和设置于顶部的控制装置,支撑板在电机启动后可进行水平方向的进给运动,其特征是驱动装置中伺服电动机与滚珠丝杠通过联轴器直接连接,实现高传动性能、高精度、高动作灵敏度的直线进给运动。
4、所述支撑组件的结构包括:垫块,用于连接底座的接地螺杆,安装于底座顶部两侧的导轨以及将导轨固定的导轨压块,多个压块将导轨压向底座并与底座固接,底座的内外部设计有板肋结构,可以增加底座的抗压强度,从而提高整个系统的承载能力,保证系统的正常运行。
5、所述驱动组件通过电机轴承座和后端轴承座固接于底座上方中部位置,电机与所述电机轴承座固接,电机与滚珠丝杠两个轴直接连接,滚珠丝杠外部连接有螺母套,用于两个组件之间的连接,电机的旋转带动滚珠丝杠旋转。
6、所述驱动组件后端轴承座内部的结构包括:用于锁紧滚珠丝杠轴上零件的螺帽,固定轴承,轴承,后端轴承座轴向移动的套圈、橡胶挡环和后端盖,两个轴承相邻布置在轴上,提高了轴的支撑能力,轴上零件布置紧凑且合理。
7、所述驱动组件电机轴承座附近的结构包括:与滚珠丝杠配合的螺母,可以随着滚珠丝杠的转动进行直线移动,从而带动控制组件水平直线运动,橡胶挡环抵挡电机轴承座,轴承和轴承相邻布置,提高了轴的支撑能力,套圈和前端盖共同抵住两个轴承,并且通过螺帽锁住轴上零件,防止轴上零件的轴向运动,电机的轴与滚珠丝杠通过连轴器直接连接,结构紧凑,减小了传动间隙,从而提高了传动效率,电机的旋转带动滚珠丝杠的旋转运动。
8、所述控制组件的结构包括:安装于支撑板底部四角的滑块以及与滑块相对应布置的滑块挡块,将滑块抵挡固接于支撑板侧边,滑块与支撑组件的导轨配合,可沿导轨进行直线滑动,支撑板之上连接机器人实现机器人的第七轴进给运动。
9、本实用新型结构紧凑、合理、操作方便,通过采用滚珠直线导轨进行直线运动导向,保证了运动的精度和动作的灵敏度,还使用通过联轴器将伺服电动机与滚珠丝杠直连的进给轴传动方式,减小了传动间隙,从而提高了传动效率,并且使用维护方便,用户体验佳。
10、本实用新型还包括如下优点:
11、启动阶段,电机轴转动直接带动与其相连的滚珠丝杠进行旋转运动,进而带动螺母以及与其配合的螺母套直线移动,进而固接于螺母套上的支撑板连同滑块沿导轨滑动,进一步实现高传动效率的机器人第七轴进给运动。
技术特征:
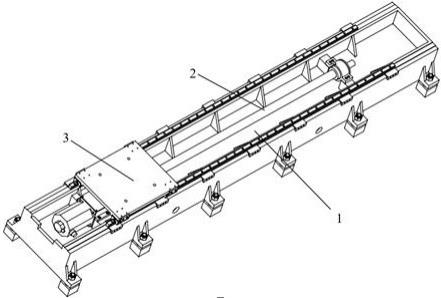
1.一种机器人第七轴进给系统,包括:支撑组件(1),安装于支撑组件上方中部的驱动组件(2),以及安装于支撑组件(1)顶部且与驱动组件连接的控制组件(3),其特征是支撑组件(1)的结构可提高系统的承载,驱动组件(2)中电机(13)与滚珠丝杠(10)通过联轴器(24)直接连接,能提高传动效率,而且控制组件(3)可实现高精度、高灵敏度的直线进给运动。
2.根据权利要求1所述一种机器人第七轴进给系统,其特征是所述支撑组件(1)的结构包括:垫块(4)和用于连接底座(6)的接地螺杆(5),安装于底座顶部两侧的导轨(7)以及将导轨(7)固定的导轨压块(8),多个压块(8)将导轨(7)压向底座(6)并与底座固接,底座(6)的内外部设计有板楞结构,可以增加底座(6)的抗压强度,从而提高整个系统的承载能力,保证系统的正常运行。
3.根据权利要求1所述一种机器人第七轴进给系统,其特征是所述驱动组件(2)通过电机轴承座(12)和后端轴承座(9)固接于底座(6)上方中部位置,电机(13)与所述电机轴承座(12)固接,电机(13)与滚珠丝杠(10)轴直接连接,滚珠丝杠(10)外部连接有螺母套(11),用于两个组件之间的连接,电机(13)的旋转带动滚珠丝杠(10)旋转。
4.根据权利要求3所述一种机器人第七轴进给系统,其特征是所述驱动组件(2)后端轴承座(9)内部的结构包括:用于锁紧滚珠丝杠(10)轴上零件的螺帽ⅰ(14),固定轴承ⅰ(16),轴承ⅱ(17),后端轴承座(9)轴向移动的套圈ⅰ(19)、橡胶挡环ⅰ(18)以及后端盖(15),两个轴承相邻布置在轴上,提高了轴的支撑能力,轴上零件布置紧凑且合理。
5.根据权利要求3所述一种机器人第七轴进给系统,其特征是所述驱动组件(2)电机轴承座(12)附近的结构包括:与滚珠丝杠(10)配合的螺母(20),可以随着滚珠丝杠(10)的转动进行直线移动,从而带动控制组件(3)水平直线运动,橡胶挡环ⅱ(21)抵挡电机轴承座(12),轴承ⅲ(22)和轴承ⅳ(27)相邻布置,提高了轴的支撑能力,套圈ⅱ(26)和前端盖(23)共同抵住两个轴承,并且通过螺帽ⅱ(25)锁住轴上零件,防止轴上零件的轴向运动,电机(13)轴与滚珠丝杠(10)通过联轴器(24)直接连接,结构紧凑,减小了传动间隙,从而提高了传动效率,电机(13)的旋转带动滚珠丝杠(10)的旋转运动。
6.根据权利要求1所述一种机器人第七轴进给系统,其特征是所述控制组件(3)的结构包括:安装于支撑板(28)底部四角的滑块(29)以及与滑块(29)相对应布置的滑块压板(30),将滑块(29)抵挡固接于支撑板(28)侧边,滑块(29)与支撑组件(1)的导轨(7)配合,可沿导轨进行直线滑动,支撑板(28)之上连接机器人实现机器人的第七轴进给运动。
技术总结
本技术涉及机器人一种机器人第七轴进给系统,包括:支撑组件,支撑组件包括底座、垫块、导轨等;控制组件,控制组件安装于底座顶部,包括有滑块和支撑板,滑块与驱动组件连接,能够沿着导轨滑动,导轨与底座顶部两侧固定连接;驱动组件,驱动组件安装在所述支撑组件上方中部,包括有电机、联轴器和滚珠丝杠,电机轴与滚珠丝杠通过联轴器直接连接,减小了传动间隙,直线运动导向与承载采用滚珠直线导轨,保证了运动的精度和动作灵敏度。
技术研发人员:王博文,刘翼,董成龙
受保护的技术使用者:成都理工大学
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!