一种新型工业机器人的制作方法
本技术涉及工业机器人,更具体地说,涉及一种新型工业机器人。
背景技术:
1、工业是指利用自然资源和人力资源进行生产和制造的经济活动。工业生产可以涉及到原材料的采集、加工、生产和制造成最终产品的全过程。工业的发展对于国家的经济增长和社会的发展具有重要的作用。
2、工业机器人是一种自动化机器,用于在制造和生产过程中执行重复性、高精度和高效率的任务。它们通常使用计算机程序和传感器来执行各种任务,例如装配、焊接、切割、涂装、包装和搬运等。工业机器人在现代制造业中扮演着重要角色,可以提高生产效率、减少人力成本、提高产品质量和安全性。
3、现存的工业机器人具有以下不足:机械臂和底座的拆卸较为麻烦,从而在需要对机械臂拆卸检修和安装时具有复杂的步骤,增加了机械臂检修维护的时间,不具有便利性;机械臂的抓手在更换时步骤繁琐,需要花费较长时间,从而会影响工业生产的效率,多有不便。
技术实现思路
1、1.要解决的技术问题
2、本实用新型的目的在于提供一种新型工业机器人,以解决上述背景技术中提出现有机械臂拆装不便和抓手不变更换的问题。
3、2.技术方案
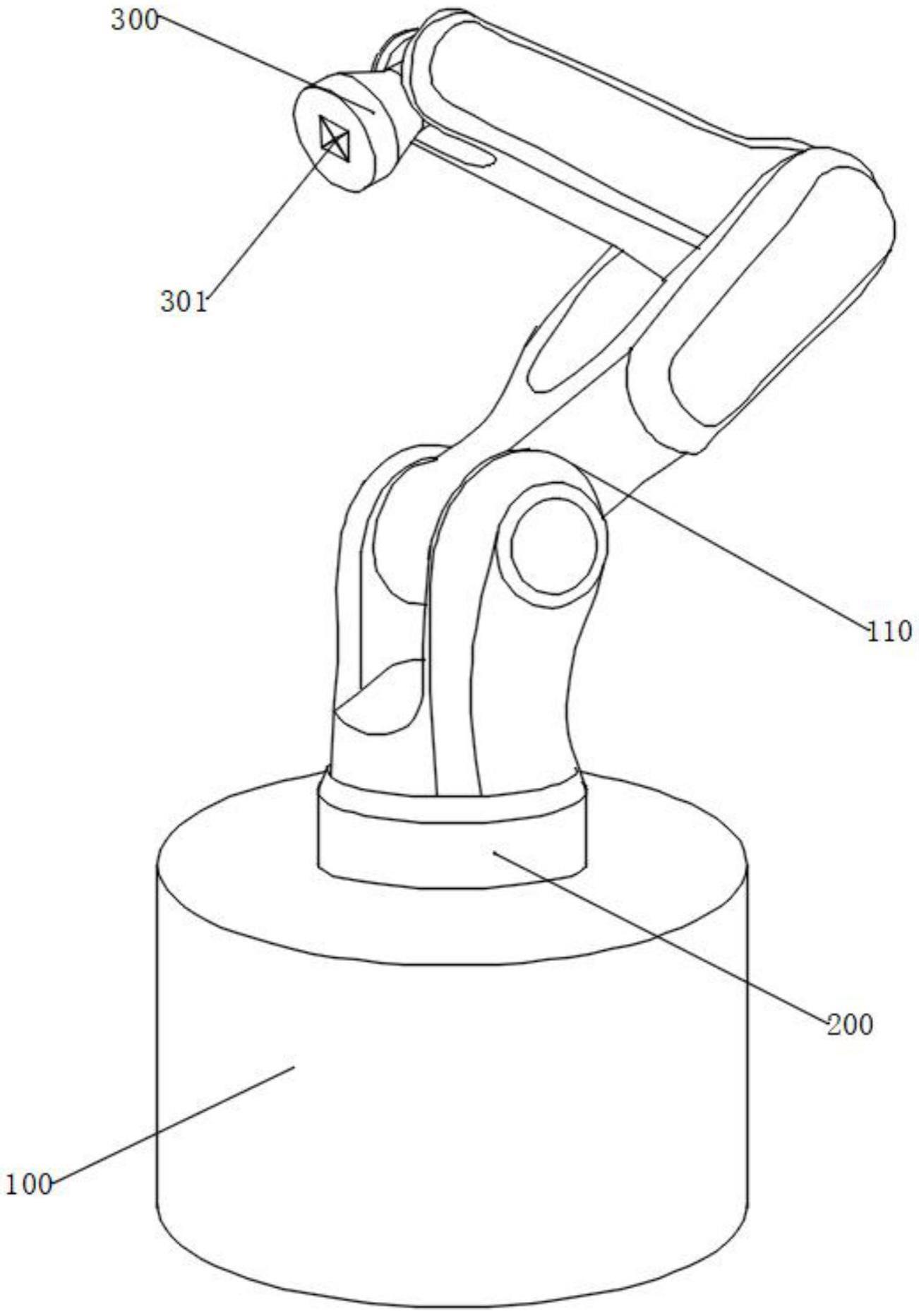
4、一种新型工业机器人,包括底座和机械臂,所述底座内部转动连接有液压伸缩柱,所述液压伸缩柱侧壁转动连接有滑动件,所述滑动件侧壁转动连接有曲杆,所述曲杆侧壁转动连接有转动杆,所述转动杆侧壁转动连接有滑块,所述滑块侧壁设置有防滑垫,所述机械臂底部设置有安装座,所述安装座底部固接有固接锥,所述固接锥侧壁设置有配合于滑块的凹槽,所述固接锥底部固接有棱柱,所述棱柱外部套接有套接件,所述套接件内部设置有电磁铁,所述机械臂左侧转动连接有固接柱,所述固接柱侧壁固接有连接件,所述连接件内部开设有锁定腔,所述锁定腔内部设置有气缸,所述气缸侧壁固接有滑动板,所述滑动板侧壁转动连接有连杆,所述连杆侧壁转动连接有转杆,所述转杆侧壁转动连接有锁定块,所述锁定腔侧壁滑动配合有锁定柱,所述锁定柱侧壁配合有推板,所述推板侧壁设置有伸缩气囊。
5、优选的,所述机械臂转动连接于底座的顶部,所述滑块滑动配合于底座的内部。
6、优选的,所述电磁铁侧壁设置有弹性片,所述套接件固接于底座的内部。
7、优选的,所述锁定柱侧壁滑动配合有方形滑槽,所述锁定柱侧壁固接有刹车片。
8、优选的,滑动件侧壁设置有弧形滑槽,所述锁定腔侧壁设置有挡片。
9、3.有益效果
10、相比于现有技术,本实用新型的优点在于:
11、本实用新型通过设置通过联动装置伸缩锁定固接锥的滑块配合底电磁铁磁吸棱柱,实现了对机械臂和安装座的快速锁定安装与解除安装,便于对机械臂的安装使用与拆卸检修,节省时间具有便利性;通过设置多个锁定柱配合气缸拉动的锁定块,可实现抓手快速安装到机械臂上,可以便利地更换机械臂的抓手,操作简单具有便利性。
技术特征:
1.一种新型工业机器人,包括底座(100)和机械臂(110),其特征在于:所述底座(100)内部转动连接有液压伸缩柱(220),所述液压伸缩柱(220)侧壁转动连接有滑动件(221),所述滑动件(221)侧壁转动连接有曲杆(223),所述曲杆(223)侧壁转动连接有转动杆(224),所述转动杆(224)侧壁转动连接有滑块(225),所述滑块(225)侧壁设置有防滑垫(226),所述机械臂(110)底部设置有安装座(200),所述安装座(200)底部固接有固接锥(210),所述固接锥(210)侧壁设置有配合于滑块(225)的凹槽(211),所述固接锥(210)底部固接有棱柱(230),所述棱柱(230)外部套接有套接件(240),所述套接件(240)内部设置有电磁铁(231),所述机械臂(110)左侧转动连接有固接柱(320),所述固接柱(320)侧壁固接有连接件(300),所述连接件(300)内部开设有锁定腔(310),所述锁定腔(310)内部设置有气缸(321),所述气缸(321)侧壁固接有滑动板(322),所述滑动板(322)侧壁转动连接有连杆(323),所述连杆(323)侧壁转动连接有转杆(324),所述转杆(324)侧壁转动连接有锁定块(325),所述锁定腔(310)侧壁滑动配合有锁定柱(330),所述锁定柱(330)侧壁配合有推板(340),所述推板(340)侧壁设置有伸缩气囊(341)。
2.根据权利要求1所述的一种新型工业机器人,其特征在于:所述机械臂(110)转动连接于底座(100)的顶部,所述滑块(225)滑动配合于底座(100)的内部。
3.根据权利要求2所述的一种新型工业机器人,其特征在于:所述电磁铁(231)侧壁设置有弹性片(232),所述套接件(240)固接于底座(100)的内部。
4.根据权利要求3所述的一种新型工业机器人,其特征在于:所述锁定柱(330)侧壁滑动配合有方形滑槽(331),所述锁定柱(330)侧壁固接有刹车片(332)。
5.根据权利要求4所述的一种新型工业机器人,其特征在于:滑动件(221)侧壁设置有弧形滑槽(222),所述锁定腔(310)侧壁设置有挡片(301)。
技术总结
本技术公开了一种新型工业机器人,属于工业机器人技术领域。包括底座和机械臂,底座内部转动连接有液压伸缩柱,液压伸缩柱侧壁转动连接有滑动件,滑动件侧壁转动连接有曲杆,曲杆侧壁转动连接有转动杆,转动杆侧壁转动连接有滑块,滑块侧壁设置有防滑垫,机械臂底部设置有安装座,安装座底部固接有固接锥。本技术通过设置通过联动装置伸缩锁定固接锥的滑块配合底电磁铁磁吸棱柱,实现了对机械臂和安装座的快速锁定安装与解除安装,便于对机械臂的安装使用与拆卸检修,节省时间具有便利性;通过设置多个锁定柱配合气缸拉动的锁定块,可实现抓手快速安装到机械臂上,可以便利地更换机械臂的抓手,操作简单具有便利性。
技术研发人员:刘艳楠,王刚
受保护的技术使用者:山东拓奇机器人科技有限公司
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!