一种铝材定位摆杆机械手的制作方法
本技术涉及一种铝材移送设备,尤其涉及一种铝材定位摆杆机械手。
背景技术:
1、现代铝材加工行业中,常常采用机械手对铝材进行夹持和移送。现有的机械手包括移动机构和夹持机构,夹持机构用于夹持铝材,移动机构带动夹持机构移动,从而实现铝材的移送。现有的夹持机构通常为两个能够相向移动的夹持板,通过夹持板的平面对铝材进行夹持,由于铝材的外轮廓的形状多样,不规则的铝材在夹持过程中容易发生旋转,导致机械手无法对铝材的位置状态进行精确预测,影响铝材控制精确性。
技术实现思路
1、本实用新型为了解决现有技术的缺陷,提供了一种铝材定位摆杆机械手,可稳定夹持外轮廓不规则的铝材,对其精准移送。
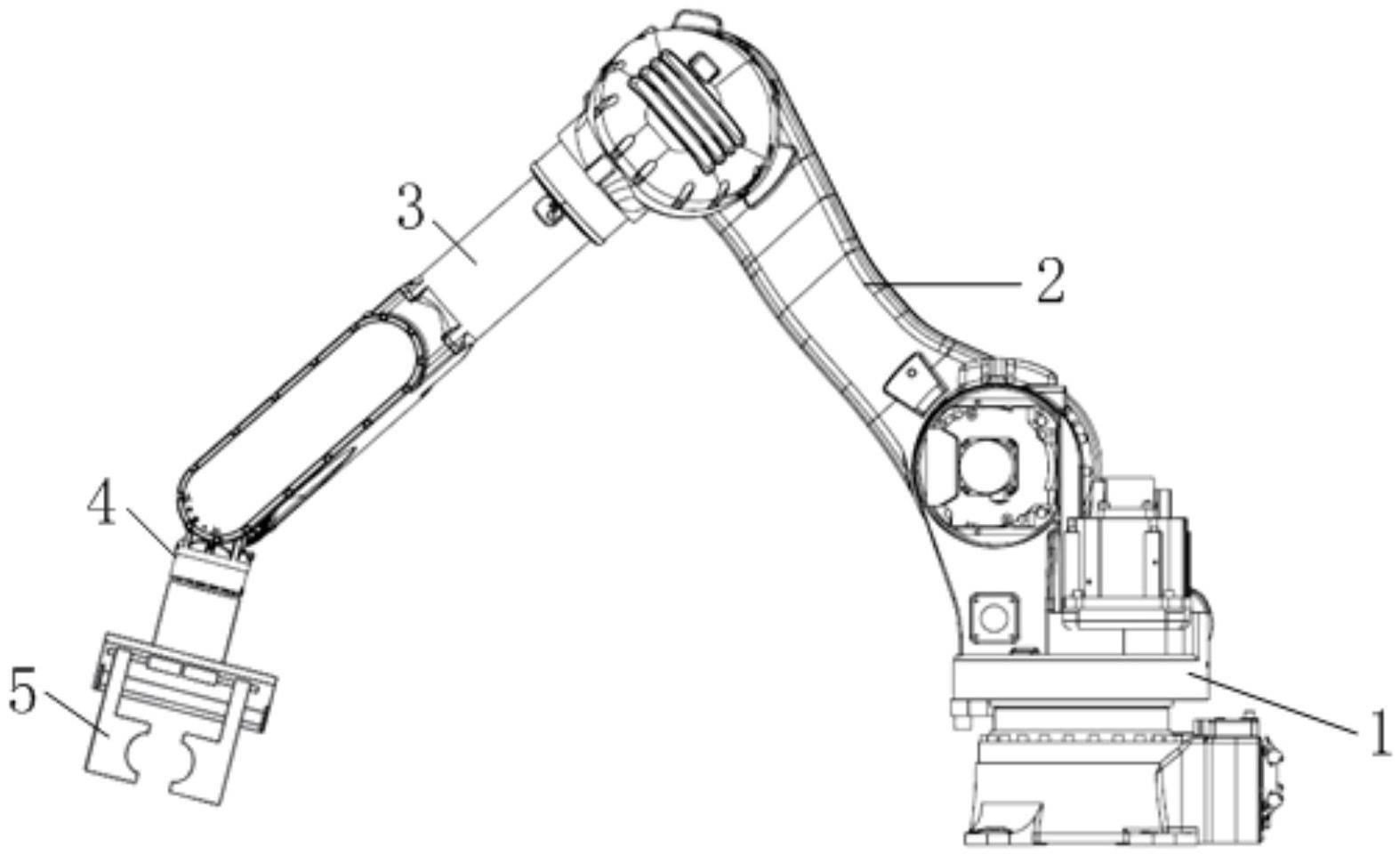
2、为了解决上述技术问题,本实用新型提供了一种铝材定位摆杆机械手,包括旋转底座、第一活动臂、第二活动臂、旋转盘和夹爪;所述第一活动臂一端铰接于所述旋转底座上,另一端与所述第二活动臂铰接;所述第二活动臂的末端通过所述旋转盘与所述夹爪连接,所述旋转盘能够驱动所述夹爪相对所述第二活动臂旋转;
3、所述夹爪包括夹爪安装座、弧面夹头驱动机构、平面夹头驱动机构、弧面夹头和平面夹头,所述弧面夹头通过所述弧面夹头驱动机构安装于所述夹爪安装座上,所述平面夹头通过所述平面夹头驱动机构安装于所述夹爪安装座上,所述弧面夹头具有能够相向远离或靠近的弧形夹持面;所述平面夹头具有能够相向远离或靠近的夹持平面。
4、作为上述方案的改进,所述弧面夹头和平面夹头位于相同的夹持通道上。
5、作为上述方案的改进,所述弧面夹头驱动机构和平面夹头驱动机构均由滑轨和开合气缸组成;所述夹爪安装座设有分隔板,所述弧面夹头驱动机构和平面夹头驱动机构分别设于所述分隔板的两侧。
6、作为上述方案的改进,所述弧面夹头和平面夹头上均设有与各自对应的所述滑轨连接的滑套。
7、作为上述方案的改进,所述弧面夹头设有相对设置的弧面夹持臂,所述平面夹头设有相对设置的平面夹持臂,每个弧面夹持臂和平面夹持臂分别与独立的开合气缸连接。
8、作为上述方案的改进,所述旋转底座包括基座、平面轴承、旋转电机和旋转座,所述旋转座通过所述平面轴承安装于所述基座上,所述旋转电机用于驱动所述旋转座相对所述基座水平转动。
9、作为上述方案的改进,所述第一活动臂与所述旋转座的连接处、所述第二活动臂与第一活动臂的连接处均设有摆动驱动电机。
10、作为上述方案的改进,所述第一活动臂具有预设弯曲弧度。
11、实施本实用新型,具有如下有益效果:
12、采用本实施例,当夹持的铝材左右两侧的外轮廓为平面时,可以采用平面夹头进行夹持;当夹持的铝材左右两侧的的外轮廓为曲面或不规则平面时,可以采用弧面夹头进行夹持,避免夹持过程中铝材产生翻转,而导致铝材输送到目标位置时其摆放角度与预期产生偏差。所述平面夹头具有夹持平面,能够与铝材侧面较大面积地接触,夹持稳定;所述弧面夹头的压紧力方向指向弧形夹持面的圆心,能够防止铝材在夹持过程中由于受力不平衡而翻转。为了进一步提升夹稳定性,所述平面夹头和弧形夹头也可以同时工作,同时发挥平面夹头夹持力大,弧面夹头防止旋转的功能。
技术特征:
1.一种铝材定位摆杆机械手,其特征在于,包括旋转底座、第一活动臂、第二活动臂、旋转盘和夹爪;所述第一活动臂一端铰接于所述旋转底座上,另一端与所述第二活动臂铰接;所述第二活动臂的末端通过所述旋转盘与所述夹爪连接,所述旋转盘能够驱动所述夹爪相对所述第二活动臂旋转;
2.如权利要求1所述的铝材定位摆杆机械手,其特征在于,所述弧面夹头和平面夹头位于相同的夹持通道上。
3.如权利要求1所述的铝材定位摆杆机械手,其特征在于,所述弧面夹头驱动机构和平面夹头驱动机构均由滑轨和开合气缸组成;所述夹爪安装座设有分隔板,所述弧面夹头驱动机构和平面夹头驱动机构分别设于所述分隔板的两侧。
4.如权利要求1所述的铝材定位摆杆机械手,其特征在于,所述弧面夹头和平面夹头上均设有与各自对应的所述滑轨连接的滑套。
5.如权利要求3所述的铝材定位摆杆机械手,其特征在于,所述弧面夹头设有相对设置的弧面夹持臂,所述平面夹头设有相对设置的平面夹持臂,每个弧面夹持臂和平面夹持臂分别与独立的开合气缸连接。
6.如权利要求1所述的铝材定位摆杆机械手,其特征在于,所述旋转底座包括基座、平面轴承、旋转电机和旋转座,所述旋转座通过所述平面轴承安装于所述基座上,所述旋转电机用于驱动所述旋转座相对所述基座水平转动。
7.如权利要求1所述的铝材定位摆杆机械手,其特征在于,所述第一活动臂与所述旋转座的连接处、所述第二活动臂与第一活动臂的连接处均设有摆动驱动电机。
8.如权利要求1所述的铝材定位摆杆机械手,其特征在于,所述第一活动臂具有预设弯曲弧度。
技术总结
本技术公开了一种铝材定位摆杆机械手,包括旋转底座、第一活动臂、第二活动臂、旋转盘和夹爪;所述第一活动臂一端铰接于所述旋转底座上,另一端与所述第二活动臂铰接;所述第二活动臂的末端通过所述旋转盘与所述夹爪连接,所述旋转盘能够驱动所述夹爪相对所述第二活动臂旋转;所述夹爪包括夹爪安装座、弧面夹头驱动机构、平面夹头驱动机构、弧面夹头和平面夹头,所述弧面夹头具有能够相向远离或靠近的弧形夹持面;所述平面夹头具有能够相向远离或靠近的夹持平面。采用本技术,可稳定夹持外轮廓不规则的铝材,对其精准移送。
技术研发人员:李伟桥,黄敏豪,蒲胜辉,谢绍结,周家祥,潘文俊,罗荣英,唐健强,李志国
受保护的技术使用者:广东南铝智能装备科技有限公司
技术研发日:20230404
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!