用于泊位统计的巡航机器人的制作方法
本申请涉及机器人,尤其涉及一种用于泊位统计的巡航机器人。
背景技术:
1、随着城市道路泊位和室内停车场的数量不断增加,需要对车辆的泊位进行统计和采集,以便更好地管理和规划停车资源,提高停车的效率和便利性。例如,通过对车辆泊位的统计和采集,了解停车场的实时使用情况,包括车位数量、空余车位数量、停车时长等信息,从而优化泊位的布局和管理,提高车位利用率,减少停车难题,提高城市交通效率和环境质量。
2、然而,现有泊位的统计和采集通常需要人工进行巡逻统计,或者通过每个泊位设置相关的地磁传感器,来实现泊位的统计和采集。通过人工或者地磁传感器的方式统计和采集泊位的成本均较高,不适合大规模使用,大大限制了泊位的统计和采集的发展。
技术实现思路
1、有鉴于此,本申请实施例提供了一种用于泊位统计的巡航机器人,解决了现有泊位统计和采集方法的成本较高的问题。
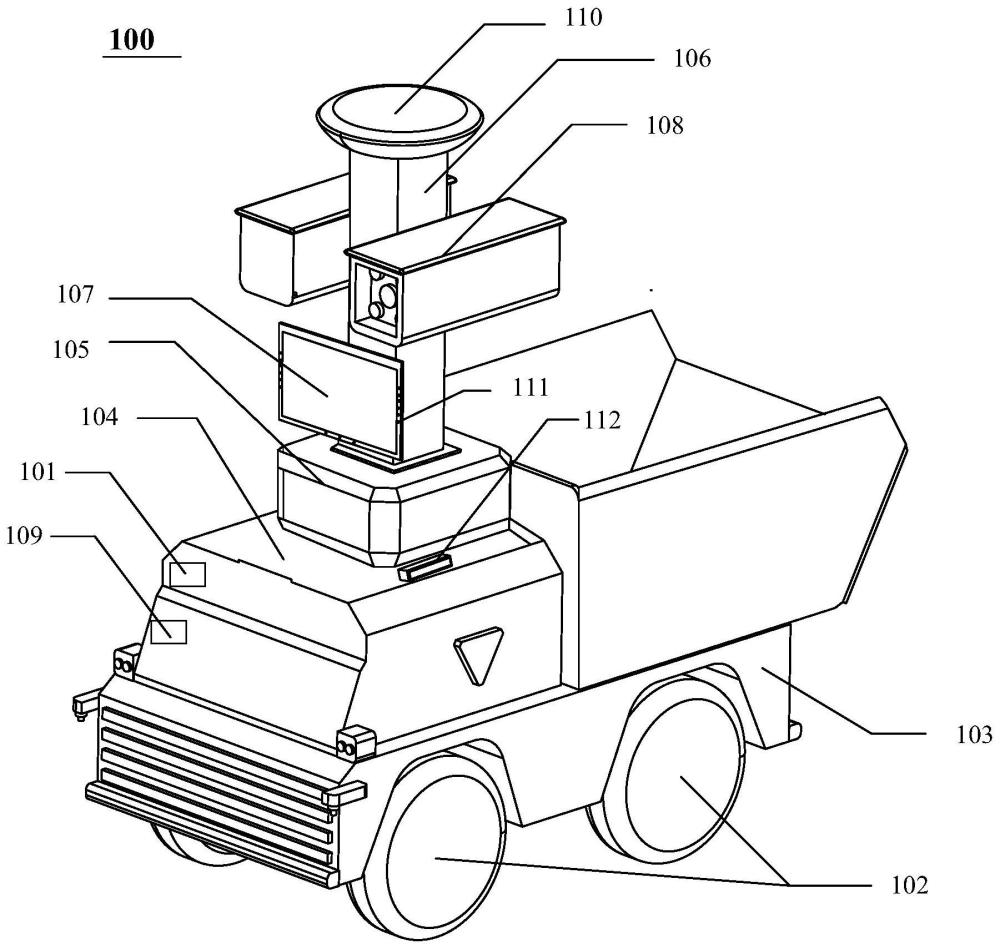
2、第一方面,本申请的实施例提供了一种,包括:控制装置、轮毂、第一支撑平台、第二支撑平台、旋转升降平台、立柱、显示装置、拍摄装置、数据处理装置、定位装置、扬声器和灯光设备;轮毂,与控制装置通信连接,用于基于控制装置的移动指令,进行移动;第一支撑平台,位于轮毂之上,用于支撑巡航机器人;第二支撑平台,位于第一支撑平台之上,用于支撑旋转升降平台;旋转升降平台,位于第二支撑平台之上,与控制装置通信连接,用于基于控制装置的升降指令和旋转指令,进行升降和旋转;立柱,位于旋转升降平台之上;显示装置,与控制装置通信连接,设置于立柱之上,用于接收控制装置的显示数据,并展示显示数据;拍摄装置,设置于立柱之上,其中,立柱包括立柱主体和旋转轴承,拍摄装置与旋转轴承连接,以通过旋转轴承实现与立柱主体的相对转动,拍摄装置与控制装置通信连接,用于基于控制装置的拍摄指令,拍摄巡航机器人周围的对象数据,发送巡航机器人周围的对象数据至数据处理装置;数据处理装置,与控制装置通信连接,用于接收巡航机器人周围的对象数据,基于巡航机器人周围的对象数据确定泊位图像数据,并发送泊位图像数据至控制装置,以便控制装置基于泊位图像数据,确定显示数据;定位装置,位于立柱的顶端,与控制装置通信连接,用于基于实时差分技术,确定泊位的位置数据,并将泊位的位置数据发送至控制装置;扬声器,内置于显示装置,显示装置的表面在扬声器对应的位置上设有孔洞,扬声器与控制装置通信连接,用于接收控制装置的语音数据,并播放语音数据;灯光设备,位于第二支撑平台上,且与控制装置通信连接,当巡航机器人周围的环境亮度低于预设亮度阈值时,控制装置发出发光指令,以使灯光设备接收发光指令,进行发光。
3、在一实施例中,该巡航机器人还包括:储存箱,位于第一支撑平台上,用于储存目标用户的物品。
4、在一实施例中,该巡航机器人还包括:遮挡板,设置于储存箱的上方,与控制装置通信连接,遮挡板包括伸缩挡板,伸缩挡板用于基于控制装置的伸缩命令,进行伸缩,以便遮挡储存箱。
5、在一实施例中,储存箱包括至少两个可移动的侧板,可移动的侧板以靠近第一支撑台上的侧板边为固定边,可沿固定边进行上下开合,以便储存箱能够卸下目标用户的物品。
6、在一实施例中,该巡航机器人还包括:光感装置,位于第一支撑平台的侧面,用于检测巡航机器人的环境亮度数据,并发送环境亮度数据至控制装置,以便控制装置基于环境亮度数据和预设亮度阈值,确定发光指令。
7、在一实施例中,该巡航机器人还包括:防撞装置,设置于第一支撑平台上,与控制装置通信连接,用于检测巡航机器人的碰撞对象的数据,发送碰撞对象的数据至控制装置,以便控制装置基于巡航机器人的碰撞对象的数据,确定停止指令,并发送停止指令发送至轮毂,以便巡航机器人能够停止移动。
8、在一实施例中,该巡航机器人还包括:激光雷达,设置于第一支撑平台上,与控制装置通信连接,用于检测巡航机器人周围的对象的数据,并将巡航机器人周围的对象数据转发至控制装置,以便控制装置基于巡航机器人周围的对象数据生成移动指令。
9、在一实施例中,控制装置包括网关模块,网关模块支持消息队列遥测传输协议,控制装置还用于基于泊位图像数据,确定泊位的空闲情况,并利用网关模块将泊位的空闲情况发送至目标用户的移动终端。
10、在一实施例中,拍摄装置包括:识别模块,识别模块用于识别巡航机器人周围的对象数据中的车牌数据,发送车牌数据至控制装置,控制装置基于车牌数据,确定车牌数据对应的收费数据,发送收费数据至显示装置,以便显示装置展示收费数据。
11、在一实施例中,数据处理装置还用于接收控制装置发送的泊位的位置数据,基于泊位图像数据和位置数据,生成泊位的分布地图,并发送泊位的分布地图至控制装置,所制装置接收泊位的分布地图,确定显示数据。
12、本申请实施例提供的用于泊位统计的巡航机器人,包括:控制装置、轮毂、第一支撑平台、第二支撑平台、旋转升降平台、立柱、显示装置、拍摄装置、数据处理装置、定位装置、扬声器和灯光设备。轮毂可以基于控制装置的移动指令进行移动;拍摄装置能够基于控制装置的拍摄指令,拍摄巡航机器人周围的对象数据;定位装置能够基于实时差分技术,确定泊位的位置数据,因此,巡航机器人可以通过控制装置、轮毂、拍摄装置、定位装置等实现自动对泊位的统计,减少了人工的成本,从而减少泊位统计和采集的成本。
技术特征:
1.一种用于泊位统计的巡航机器人,其特征在于,包括:控制装置、轮毂、第一支撑平台、第二支撑平台、旋转升降平台、立柱、显示装置、拍摄装置、数据处理装置、定位装置、扬声器和灯光设备;
2.根据权利要求1所述的巡航机器人,其特征在于,还包括:储存箱,位于所述第一支撑平台上,用于储存目标用户的物品。
3.根据权利要求2所述的巡航机器人,其特征在于,还包括:遮挡板,设置于所述储存箱的上方,与所述控制装置通信连接,所述遮挡板包括伸缩挡板,所述伸缩挡板用于基于所述控制装置的伸缩命令,进行伸缩,以便遮挡所述储存箱。
4.根据权利要求2所述的巡航机器人,其特征在于,所述储存箱包括至少两个可移动的侧板,所述可移动的侧板以靠近所述第一支撑平台上的侧板边为固定边,可沿所述固定边进行上下开合,以便所述储存箱能够卸下所述目标用户的物品。
5.根据权利要求1至4任一项所述的巡航机器人,其特征在于,还包括:光感装置,位于所述第一支撑平台的侧面,用于检测所述巡航机器人的环境亮度数据,并发送所述环境亮度数据至所述控制装置,以便所述控制装置基于所述环境亮度数据和所述预设亮度阈值,确定所述发光指令。
6.根据权利要求1至4任一项所述的巡航机器人,其特征在于,还包括:防撞装置,设置于所述第一支撑平台上,与所述控制装置通信连接,用于检测所述巡航机器人的碰撞对象的数据,发送所述碰撞对象的数据至所述控制装置,以便所述控制装置基于所述巡航机器人的碰撞对象的数据,确定停止指令,并发送所述停止指令发送至所述轮毂,以便所述巡航机器人能够停止移动。
7.根据权利要求1至4任一项所述的巡航机器人,其特征在于,还包括:激光雷达,设置于所述第一支撑平台上,与所述控制装置通信连接,用于检测所述巡航机器人周围的对象的数据,并将所述巡航机器人周围的对象数据转发至所述控制装置,以便所述控制装置基于所述巡航机器人周围的对象数据生成所述移动指令。
8.根据权利要求2至4任一项所述的巡航机器人,其特征在于,所述控制装置包括网关模块,所述网关模块支持消息队列遥测传输协议,所述控制装置还用于基于所述泊位图像数据,确定泊位的空闲情况,并利用所述网关模块将所述泊位的空闲情况发送至所述目标用户的移动终端。
9.根据权利要求1至4任一项所述的巡航机器人,其特征在于,所述拍摄装置包括:识别模块,所述识别模块用于识别所述巡航机器人周围的对象数据中的车牌数据,发送所述车牌数据至所述控制装置,所述控制装置基于所述车牌数据,确定所述车牌数据对应的收费数据,发送所述收费数据至所述显示装置,以便所述显示装置展示所述收费数据。
10.根据权利要求1至4任一项所述的巡航机器人,其特征在于,所述数据处理装置还用于接收所述控制装置发送的泊位的位置数据,基于所述泊位图像数据和所述位置数据,生成泊位的分布地图,并发送所述泊位的分布地图至所述控制装置,所述控制装置接收所述泊位的分布地图,确定所述显示数据。
技术总结
本申请涉及机器人技术领域,具体涉及一种用于泊位统计的巡航机器人,解决了现有泊位统计和采集方法的成本较高的问题。用于泊位统计的巡航机器人,包括:控制装置、轮毂、第一支撑平台、第二支撑平台、旋转升降平台、立柱、显示装置、拍摄装置、数据处理装置、定位装置、扬声器和灯光设备。轮毂可以基于控制装置的移动指令进行移动;拍摄装置能够基于控制装置的拍摄指令,拍摄巡航机器人周围的对象数据;定位装置能够基于实时差分技术,确定泊位的位置数据,因此,巡航机器人通过控制装置、轮毂、拍摄装置、定位装置等实现对泊位的统计,减少了人工的成本,从而减少泊位统计和采集的成本。
技术研发人员:蒋君伟,张浩,崔文亮,蒋君辉,崔文球,刘伟,刘欣武
受保护的技术使用者:好停车(北京)信息技术有限公司天津分公司
技术研发日:20230526
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!