一种具有监视功能的搜救机器人
本技术涉及搜救机器人,尤其涉及一种具有监视功能的搜救机器人。
背景技术:
1、煤矿事故发生后,即使提前布置在井下的传感器以及网络设备大部分都会受到影响,无法正常工作,数据传输不到井上,影响搜救工作的实施,而且很有可能存在二次坍塌的风险,这种情况下不利于人工下井探测,所以,大量的搜救型机器人应运而生,搜救机器人能够有效提高人工搜救,提高搜救效率、降低救援人员的安全威胁。
2、但是,现有的搜救机器人上通常会设置监控探头,以方便矿井外的搜救人员观察矿井内的情况,但是其搜救机器人在矿井下时,其矿井下的恶劣环境容易造成灰尘粘附在监控探头上,影响对矿井下的观察。
技术实现思路
1、本实用新型的目的是为了解决现有的搜救机器人上通常会设置监控探头,以方便矿井外的搜救人员观察矿井内的情况,但是其搜救机器人在矿井下时,其矿井下的恶劣环境容易造成灰尘粘附在监控探头上,影响对矿井下的观察的缺点,而提出的一种具有监视功能的搜救机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种具有监视功能的搜救机器人,包括:
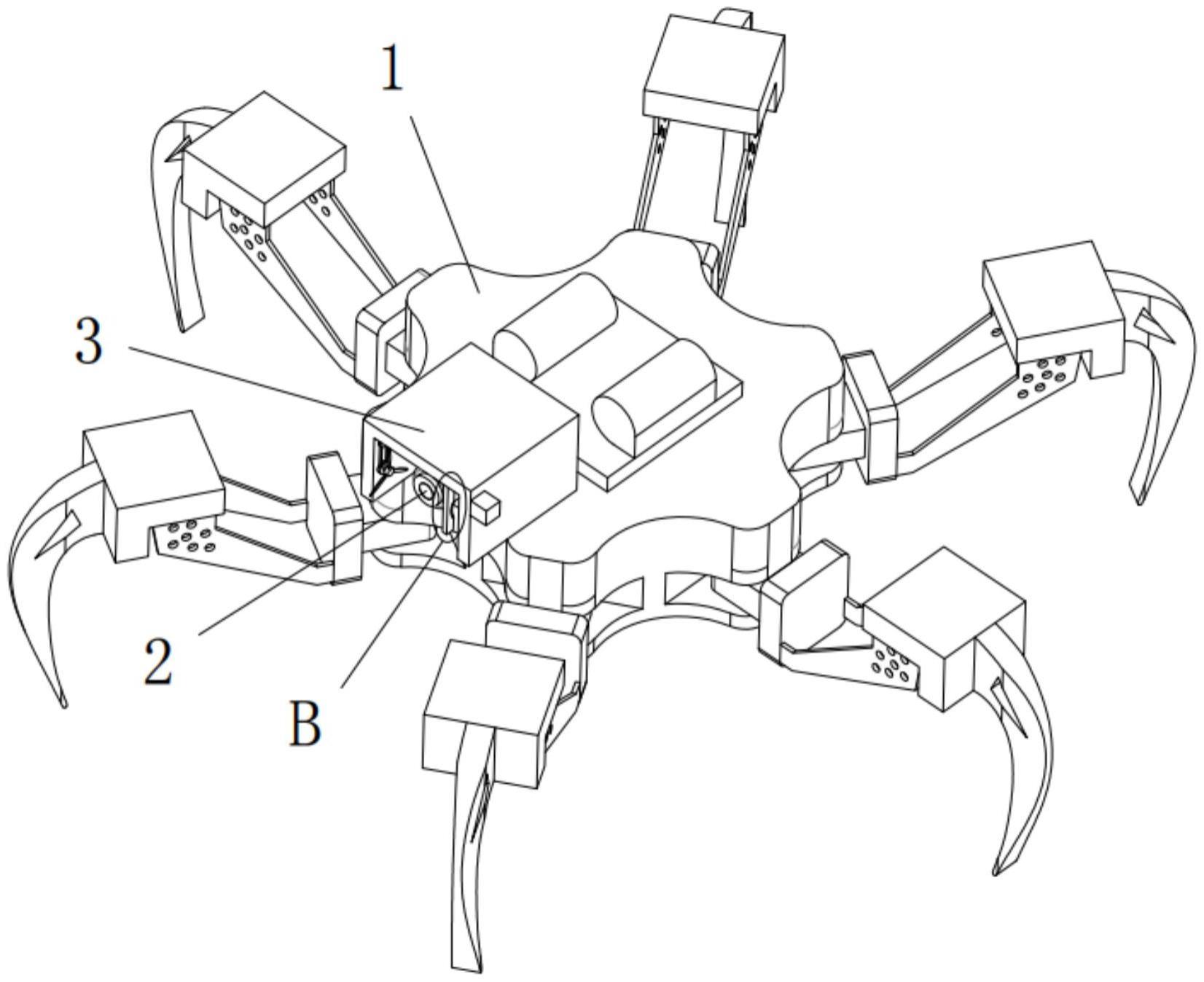
4、搜救机器人本体,所述搜救机器人本体上固定安装有监控摄像头,所述搜救机器人本体上固定安装有防护罩;
5、所述防护罩上固定安装有电机,所述电机的输出轴上固定连接有往复丝杆,所述往复丝杆伸至所述防护罩内并螺纹套设有清洁条,所述清洁条滑动连接在所述防护罩内,所述防护罩内转动安装有卡轴,所述往复丝杆与所述卡轴的外侧均固定套设有皮带轮,两个所述皮带轮上传动设置有同一个皮带,所述卡轴上固定安装有扇叶。
6、在一个优选的实施方式中,所述监控摄像头位于所述防护罩内。
7、在一个优选的实施方式中,所述防护罩上固定安装有电机罩,所述电机位于所述电机罩内。
8、在一个优选的实施方式中,所述防护罩的顶侧内壁上开设有限位槽,所述清洁条滑动连接在所述限位槽内。
9、在一个优选的实施方式中,所述清洁条的一侧开设有弧形豁口,所述弧形豁口内固定设置有海绵垫。
10、在一个优选的实施方式中,所述防护罩的一侧内壁上开设有安装槽,所述安装槽内固定安装有轴承,所述卡轴与所述轴承的内圈固定套接。
11、本实用新型中,所述的一种具有监视功能的搜救机器人,通过搜救机器人本体、监控摄像头以及防护罩的共同配合,可以方便观察矿井下的环境,并且可以通过防护罩对监控摄像头起到防护保护作用;
12、本实用新型中,所述的一种具有监视功能的搜救机器人,通过防护罩、电机、往复丝杆、两个皮带轮与皮带的传动连接设置、卡轴、扇叶、清洁条以及海绵擦的共同配合,可以方便对监控摄像头的镜头进行擦拭,可以避免灰尘沾染在监控摄像头的镜头上影响矿井外搜救人员对矿井下环境的观察;
技术特征:
1.一种具有监视功能的搜救机器人,其特征在于,包括:
2.根据权利要求1所述的一种具有监视功能的搜救机器人,其特征在于:所述监控摄像头(2)位于所述防护罩(3)内。
3.根据权利要求1所述的一种具有监视功能的搜救机器人,其特征在于:所述防护罩(3)上固定安装有电机罩(5),所述电机(4)位于所述电机罩(5)内。
4.根据权利要求1所述的一种具有监视功能的搜救机器人,其特征在于:所述防护罩(3)的顶侧内壁上开设有限位槽(7),所述清洁条(8)滑动连接在所述限位槽(7)内。
5.根据权利要求1所述的一种具有监视功能的搜救机器人,其特征在于:所述清洁条(8)的一侧开设有弧形豁口,所述弧形豁口内固定设置有海绵垫(9)。
6.根据权利要求1所述的一种具有监视功能的搜救机器人,其特征在于:所述防护罩(3)的一侧内壁上开设有安装槽,所述安装槽内固定安装有轴承,所述卡轴(10)与所述轴承的内圈固定套接。
技术总结
本技术公开了一种具有监视功能的搜救机器人,涉及搜救机器人技术领域,针对矿井下的恶劣环境容易造成灰尘粘附在监控探头上,影响对矿井下的观察的问题,现提出如下方案,包括:搜救机器人本体,所述搜救机器人本体上固定安装有监控摄像头,所述搜救机器人本体上固定安装有防护罩;所述防护罩上固定安装有电机,所述电机的输出轴上固定连接有往复丝杆。本技术可以通过监控摄像头方便观察矿井下的环境,并且可以通过防护罩对监控摄像头起到防护保护作用,并且可以方便对监控摄像头的镜头进行擦拭,可以避免灰尘沾染在监控摄像头的镜头上影响矿井外搜救人员对矿井下环境的观察。
技术研发人员:王亚平,谢文霞,魏璁琪
受保护的技术使用者:陕西能源职业技术学院
技术研发日:20230602
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!