一种应用于保温杯的机械手臂及生产装置的制作方法
本技术涉及的是自动化设备,具体而言,尤其涉及一种应用于保温杯的机械手臂及生产装置。
背景技术:
1、在保温杯的生产过程中,保温杯需要依次进行激光切割、缩口加工、激光切头、拉伸杯身、整形、压螺纹以及平口平底一系列工艺,目前,整个加工过程中一般采用单独设备和多人操作进行加工,需要人工将加工好的保温杯放置下一加工设备中,通过采用人工方式将保温杯进行加工或运输至下一生产线,生产效率低,人工成本高;故提供一种应用于保温杯的机械手臂及生产装置,用于解决在保温杯生产过程中抓取效率较低的问题。
技术实现思路
1、本实用新型的目的之一在于提供一种应用于保温杯的机械手臂及生产装置,以便于解决在保温杯生产过程中抓取效率较低的问题。
2、本实用新型一种应用于保温杯的机械手臂及生产装置可以通过下列技术方案来实现:
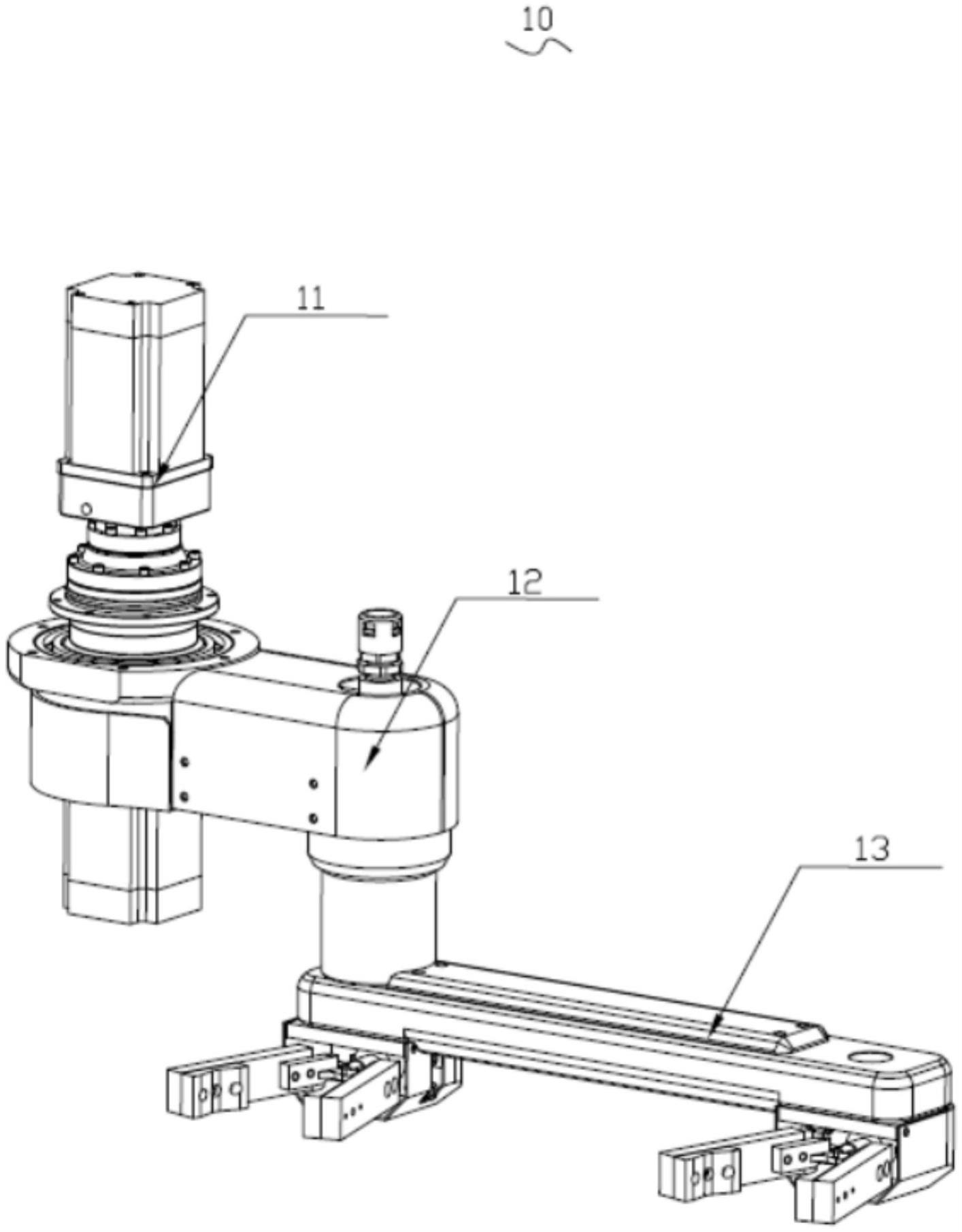
3、本实用新型一种应用于保温杯的机械手臂包括依次设置的旋转组件、伸展臂组件和夹取臂组件,所述旋转组件带动所述伸展臂组件转动,所述伸展臂组件带动所述夹取臂组件转动,所述夹取臂组件分别同时对两个不同的保温杯体进行夹取;所述伸展臂组件包括伸展臂壳体、第二旋转电机、传动机构和旋转轴机构;所述伸展臂壳体为中空腔体,其与所述旋转组件连接;所述第二旋转电机设置在所述伸展臂壳体的侧边;所述传动机构设置在所述伸展臂壳体中,其两端分别与所述第二旋转电机、所述旋转轴机构连接;所述旋转轴机构活动设置在所述伸展臂壳体相对所述第二旋转电机的另一侧边且与所述夹取臂组件连接。
4、在其中一种实施方式中,所述旋转组件包括第一旋转电机、减速机构和旋转主轴机构;所述减速机构与所述第一旋转电机的旋转轴连接;所述旋转主轴机构设置在所述减速机构上且与所述伸展臂组件连接。
5、在其中一种实施方式中,所述第一旋转电机和所述第二旋转电机采用的是伺服电机。
6、在其中一种实施方式中,所述减速机构采用的是行星减速结构。
7、在其中一种实施方式中,所述伸展臂壳体包括支撑壳体和主壳体;所述主壳体设置在所述支撑壳体上,其两者通过卡扣结构或者螺丝结构连接。
8、在其中一种实施方式中,所述传动机构包括主动轮、从动轮和传动带;所述主动轮固定设置在所述第二旋转电机的转动轴上;所述从动轮设置在所述主动轮的一侧且与所述旋转轴机构连接;所述传动带设置在所述主动轮和所述从动轮之间。
9、在其中一种实施方式中,所述旋转轴机构包括轴承和旋转轴主体,所述轴承固定设置在所述伸展臂壳体中,所述旋转轴主体活动设置在所述轴承中且与所述从动轮连接。
10、在其中一种实施方式中,所述夹取臂组件包括夹取臂机构和两个夹取爪机构;所述夹取臂机构与所述旋转轴机构连接;两个所述夹取爪机构活动设置在所述夹取臂机构上。
11、在其中一种实施方式中,所述夹取爪机构包括安装架、夹取气缸和两个夹取爪;所述安装架固定设置在所述夹取臂机构上;所述夹取气缸设置在所述安装架上;两个所述夹取爪对称设置且分别与所述夹取气缸连接。
12、一种应用于保温杯的生产装置包括上述上述任一项所述的机械手臂。
13、与现有技术相比,本实用新型一种应用于保温杯的机械手臂及生产装置的有益效果为:
14、本实用新型一种应用于保温杯的机械手臂及生产装置通过旋转组件带动伸展臂组件进行精确转动,实现机械手臂的第一个维度运动;通过伸展臂组件带动夹取臂组件进行精确转动,实现机械手臂的第二个维度运动;再通过两个夹取爪机构对同时对两个不同的保温杯体进行夹取操作,实现对两个保温杯体的自动抓取功能,提高了保温杯体的抓取效率,有效地解决了在保温杯生产过程中抓取效率较低的问题。
技术特征:
1.一种应用于保温杯的机械手臂,其特征在于,包括依次设置的旋转组件、伸展臂组件和夹取臂组件,所述旋转组件带动所述伸展臂组件转动,所述伸展臂组件带动所述夹取臂组件转动,所述夹取臂组件分别同时对两个不同的保温杯体进行夹取;所述伸展臂组件包括伸展臂壳体、第二旋转电机、传动机构和旋转轴机构;所述伸展臂壳体为中空腔体,其与所述旋转组件连接;所述第二旋转电机设置在所述伸展臂壳体的侧边;所述传动机构设置在所述伸展臂壳体中,其两端分别与所述第二旋转电机、所述旋转轴机构连接;所述旋转轴机构活动设置在所述伸展臂壳体相对所述第二旋转电机的另一侧边且与所述夹取臂组件连接。
2.根据权利要求1所述的一种应用于保温杯的机械手臂,其特征在于,所述旋转组件包括第一旋转电机、减速机构和旋转主轴机构;所述减速机构与所述第一旋转电机的旋转轴连接;所述旋转主轴机构设置在所述减速机构上且与所述伸展臂组件连接。
3.根据权利要求2所述的一种应用于保温杯的机械手臂,其特征在于,所述第一旋转电机和所述第二旋转电机采用的是伺服电机。
4.根据权利要求2所述的一种应用于保温杯的机械手臂,其特征在于,所述减速机构采用的是行星减速结构。
5.根据权利要求1所述的一种应用于保温杯的机械手臂,其特征在于,所述伸展臂壳体包括支撑壳体和主壳体;所述主壳体设置在所述支撑壳体上,其两者通过卡扣结构或者螺丝结构连接。
6.根据权利要求1所述的一种应用于保温杯的机械手臂,其特征在于,所述传动机构包括主动轮、从动轮和传动带;所述主动轮固定设置在所述第二旋转电机的转动轴上;所述从动轮设置在所述主动轮的一侧且与所述旋转轴机构连接;所述传动带设置在所述主动轮和所述从动轮之间。
7.根据权利要求6所述的一种应用于保温杯的机械手臂,其特征在于,所述旋转轴机构包括轴承和旋转轴主体,所述轴承固定设置在所述伸展臂壳体中,所述旋转轴主体活动设置在所述轴承中且与所述从动轮连接。
8.根据权利要求6所述的一种应用于保温杯的机械手臂,其特征在于,所述夹取臂组件包括夹取臂机构和两个夹取爪机构;所述夹取臂机构与所述旋转轴机构连接;两个所述夹取爪机构活动设置在所述夹取臂机构上。
9.根据权利要求8所述的一种应用于保温杯的机械手臂,其特征在于,所述夹取爪机构包括安装架、夹取气缸和两个夹取爪;所述安装架固定设置在所述夹取臂机构上;所述夹取气缸设置在所述安装架上;两个所述夹取爪对称设置且分别与所述夹取气缸连接。
10.一种应用于保温杯的生产装置,其特征在于,包括上述权利要求1-9任一项所述的机械手臂。
技术总结
本技术公开了一种应用于保温杯的机械手臂,包括依次设置的旋转组件、伸展臂组件和夹取臂组件,所述旋转组件带动所述伸展臂组件转动,所述伸展臂组件带动所述夹取臂组件转动;所述伸展臂组件包括伸展臂壳体,其为中空腔体且与所述旋转组件连接;设置在所述伸展臂壳体侧边的第二旋转电机;设置在所述伸展臂壳体中的传动机构,其两端分别与所述第二旋转电机、旋转轴机构连接;所述旋转轴机构活动设置在所述伸展臂壳体相对所述第二旋转电机的另一侧边且与所述夹取臂组件连接。本技术还公开了一种应用于保温杯的生产装置。本技术通过旋转组件、伸展臂组件和夹取臂组件相互配合,有效地解决了在保温杯生产过程中抓取效率较低的问题。
技术研发人员:孙鱼
受保护的技术使用者:永康市钛龙科技有限公司
技术研发日:20230602
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!